

2.5. Часові та частотні характеристики двомасової системи
Я
Рис.2.7.
Розрахункова схема двомасової
системи кщо
між валом двигуна і робочим органом є
пружна ланка, наприклад, довгий вал чи
линва з коефі-цієнтом жорсткості
кщо
між валом двигуна і робочим органом є
пружна ланка, наприклад, довгий вал чи
линва з коефі-цієнтом жорсткості
![]() ,
то таку сис-тему не можна привести до
однома-сової. На рис.2.7
,
то таку сис-тему не можна привести до
однома-сової. На рис.2.7
![]() – момент інерції двигуна і жорстко
зв’язаних з ним мас;
– момент інерції двигуна і жорстко
зв’язаних з ним мас;
![]() – момент інерції робочого органа і
жорстко зв’язаних з ним мас;
– момент інерції робочого органа і
жорстко зв’язаних з ним мас;
![]() – пружний момент.
– пружний момент.
При сталих моментах інерції і кожна із мас описується рівнянням виду (2.6). Тому рівняння руху двомасової системи матимуть вид:
![]() ;
;
 ;
;
![]() .
(2.29)
.
(2.29)

Рис.2.8. Структурна схема двомасової системи електропривода
Перетворивши систему рівнянь (2.29) за Лампласом при нульових початкових умовах, одержимо
![]() ;
;
![]() ;
;
![]() .
.
Цій системі рівнянь відповідає структурна схема на рис.2.8. Вона має на відміну від схеми на рис.2.4 перехрестні зворотні зв’язки.
Для
випадку
![]() і
і
![]() система рівнянь (2.29) при-водиться до
виду:
система рівнянь (2.29) при-водиться до
виду:
![]() ,
(2.30)
,
(2.30)
де
![]() і
і
 .
.
Диференціальному
рівнянню (2.30) відповідає характеристичне
рівняння
![]() ,
корені якого
,
корені якого
![]() і
і
![]() .
Цим кореням відповідає розв’язок
.
Цим кореням відповідає розв’язок
![]() ,
(2.31)
,
(2.31)
де
![]() і
і
![]() – коефіцієнти, які визначають із
початкових умов.
– коефіцієнти, які визначають із
початкових умов.
При
![]()
![]() і
і
![]() ,
бо при
пружний мо-мент
,
бо при
пружний мо-мент
![]() дорівнює нулю. Підставивши в /2.31/
,
одержимо
дорівнює нулю. Підставивши в /2.31/
,
одержимо
![]() .
Похідна
.
Похідна
![]() .
Підставивши в це рівняння
і
,
одержимо
.
Підставивши в це рівняння
і
,
одержимо
![]()
![]() .
Звідси
.
Звідси
![]() .
.
З врахуванням визначених коефіцієнтів /2.31/ буде таким:
![]() .
(2.32)
.
(2.32)
На
рис.2.9. показано графік
![]() і його складові згідно (2.32). З порівняння
цього графіка з графіком на рис.2.1,а
слідує, що пружна ланка зумовлює
коливальну складову, яка має вид
незгасаючих коливань. В реальній пружній
ланці коливання є згасаючими, бо мають
місце втрати енергії при деформації,
що не було враховано при складанні
рівнянь (2.29).
і його складові згідно (2.32). З порівняння
цього графіка з графіком на рис.2.1,а
слідує, що пружна ланка зумовлює
коливальну складову, яка має вид
незгасаючих коливань. В реальній пружній
ланці коливання є згасаючими, бо мають
місце втрати енергії при деформації,
що не було враховано при складанні
рівнянь (2.29).
Р івнянню
(2.30) відповідає передавальна функція
івнянню
(2.30) відповідає передавальна функція
Рис.2.9.
Перехідний процес у двома-
совій системі![]()
 .
(2.33)
.
(2.33)
Заміною в (2.33) на одержують амплітудно-фазову часто-тну характеристику
 .
(2.34)
.
(2.34)
Амплітудночастотна характеристика двомасової системи
 (2.35)
(2.35)
і фазочастотна характеристика
 .
(2.36)
.
(2.36)
Оскільки
,
то
![]() при
при
![]() і
і
![]()
![]() при
при
![]() .
.
З
рис.2.10 слідує, що при
![]() амплітуда коливань стає рів-ною
безмежності, що свідчить про виникнення
явища резонансу.
амплітуда коливань стає рів-ною
безмежності, що свідчить про виникнення
явища резонансу.
а
б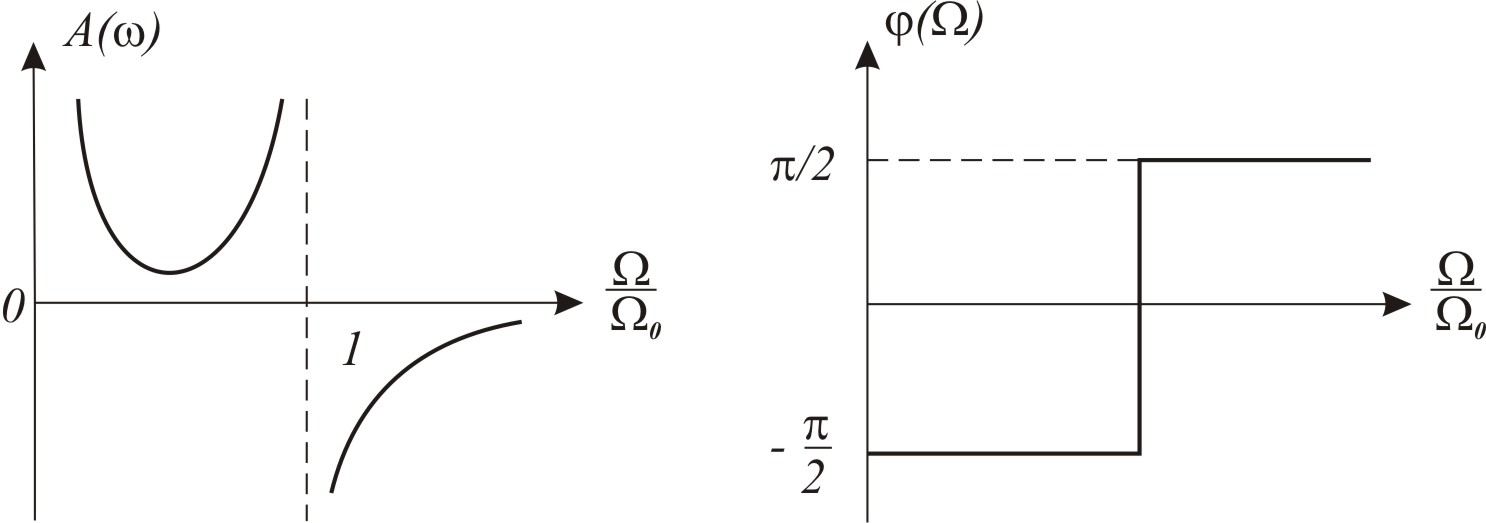
Рис.2.10. Амплітудночастотна та фазочастотна характеристики двомасової системи
Отже,
![]() є частотою
власних коливань системи.
При
фаза коливань змінює свій знак, що також
є ознакою явища резонансу.
є частотою
власних коливань системи.
При
фаза коливань змінює свій знак, що також
є ознакою явища резонансу.
Контрольні запитання і задачі
1. Який закон використовують для виводу рівняння руху елект-ропривода?
2. Для яких виробничих механізмів справедливим є рівняння ?
3.
Визначити
час розгону електропривода до швидкості
![]()
![]() ,
якщо приведений момент інерції
,
якщо приведений момент інерції
![]() ,
момент
,
момент
![]() і момент сил опору
і момент сил опору
![]() .
.
4.
Визначити
час гальмування електропривода зі
швидкості
![]() ,якщо приведений момент інерції
,
гальмівний момент двигуна
,якщо приведений момент інерції
,
гальмівний момент двигуна
![]() і момент сил опору
і момент сил опору
![]() .
.
5. Коли використовують грифо-аналітичний метод розрахунку часу розгону електропривода?
6. Запишіть рівняння передавальної функції електропривода за керуючим впливом, для якого .
7. Запишіть рівняння амплітудночастотної характеристики елект-ропривода, для якого .
8. Складіть рівняння руху двомасової системи електропривода.
9.
У випадку
і
двомасова система описуєть-ся рівнянням
![]() .
Для цього випадку скла-діть рівняння
передавальної функції.
.
Для цього випадку скла-діть рівняння
передавальної функції.
10. За якою формулою у двомасовій системі електропривода визначають власну частоту коливань?
Розділ 3