

13.3. Система автоматичного керування моменту сд зміною магнітного потоку ротора
В
якості електропривода потужних
вентиляторів, помп, екстру-дерів та
інших механізмів у діапазоні 1:10
використовують вентиль-ні двигуни з
електромагнітним збудженням. Оскільки
момент нава-нтаження таких механізмів
змінюється, зазвичай, плавно, то страте-гія
керування може бути такою: регулюють
магнітний потік ротора при номінальному
струмі статора і заданому куті
![]() ,
що забезпечує давач положення ротора.
,
що забезпечує давач положення ротора.
На
рис. 13.3 наведено функціональну схему,
яка реалізує вказану стратегію курування.
Вона складається з трьох контурів:
контуру регулювання струму збудження,
який визначає магнітний потік ро-тора;
контуру стабілізації струму статора і
контуру регулювання швидкості
![]() .
.
Регулювання
магнітного потоку ротора здійснюється
відповід-ним регулюванням струму
збудження з врахуванням насичення. За
умови
![]() необхідно адаптувати магнітний потік
ротора до зміни навантаження двигуна,
тобто до струму статора. Цю адап-тацію
забезпечує функціональний перетворювач
ФП, вихідний сиг-нал якого є задаючим
для контуру регулювання струму збудження
за умови, що при
необхідно адаптувати магнітний потік
ротора до зміни навантаження двигуна,
тобто до струму статора. Цю адап-тацію
забезпечує функціональний перетворювач
ФП, вихідний сиг-нал якого є задаючим
для контуру регулювання струму збудження
за умови, що при
![]()
![]() .
До контуру регулювання струму збудження,
крім ФП як задаючого елемента, входять
регуля-тор струму РСЗ, СІФКЗ керованим
випрямлячем напруги КВЗ, обмотка
збудження ОЗ і давач струму ДСЗ. Цей
контур призначений стабілізувати струм
збудження на рівні, який задається ФП.
.
До контуру регулювання струму збудження,
крім ФП як задаючого елемента, входять
регуля-тор струму РСЗ, СІФКЗ керованим
випрямлячем напруги КВЗ, обмотка
збудження ОЗ і давач струму ДСЗ. Цей
контур призначений стабілізувати струм
збудження на рівні, який задається ФП.

Рис13.3. Функціональна схема автоматичного керування вентильним двигуном
Стабілізація
струму статора, величина якого задається
регулято-ром швидкості РШ, забезпечується
контуром регулюванням
![]() ,
який пропорційний струму першої гармоніки
струму в обмотках статора
.
Між струмами
і
є пропорційна залежність.
,
який пропорційний струму першої гармоніки
струму в обмотках статора
.
Між струмами
і
є пропорційна залежність.
Задаючим
сигналом у контурі регулювання швидкості
є сигнал
![]() ,
пропорційний швидкості СД. Функцію
тахогенератора у цьо-му контурі виконує
перерахункова схема, яка кількість
імпульсів ДПР за одиницю часу перетворює
у напругу, пропорційну швид-кості.
,
пропорційний швидкості СД. Функцію
тахогенератора у цьо-му контурі виконує
перерахункова схема, яка кількість
імпульсів ДПР за одиницю часу перетворює
у напругу, пропорційну швид-кості.
Керування
ключами інвертора здійснює блок керування
інверто-ром БКІ, на вхід якого поступають
сигнали від ДПР. Ці сигнали синхронізовані
й сфазовані так, щоб підтримувати сталим
кут
![]() .
.
13.4. Стратегії керування сд зі збудженням від постійних магнітів
Магнітний
потік ротора СД з постійними магнітами
є сталим
![]() .
Особливістю двигуна з явновираженими
полюсами є те, що магнітні опори
повітряного проміжку по поздовжній
і по-перечній
осях (рис.13.1,а) є різними, що зумовлює
різні індуктивні опори
.
Особливістю двигуна з явновираженими
полюсами є те, що магнітні опори
повітряного проміжку по поздовжній
і по-перечній
осях (рис.13.1,а) є різними, що зумовлює
різні індуктивні опори
![]() і
і
![]() і два електромагнітні моменти:
синхронізуючий і реактивний (рис.5.14).
Тому результуючий електромагнітний
момент за умови нехтування опором
обмотки статора
і два електромагнітні моменти:
синхронізуючий і реактивний (рис.5.14).
Тому результуючий електромагнітний
момент за умови нехтування опором
обмотки статора
![]()
 ,
(13.4)
,
(13.4)
де перший член в (13.4) визначає синхронізуючий момент, а другий – реактивний.
Якщо
СД живити від інвертора струму, то (13.4)
з врахуванням, що
![]() і
і
![]() ,
можна представити у виді:
,
можна представити у виді:
![]() ,
(13.5)
,
(13.5)
де
![]() для перезбудженого двигуна
для перезбудженого двигуна
![]() .
.
Із (13.5) витікають дві стратегії керування.
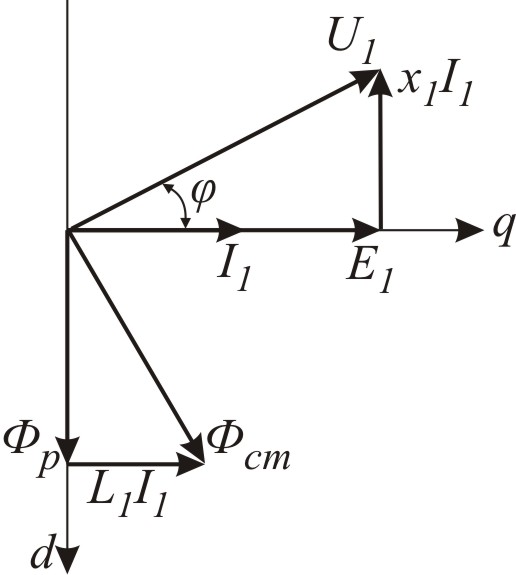
1.Керування
за умови
.
Це відповідає
![]() ,
що ілюст-
,
що ілюст-
рує векторна діаграма на рис.13.4.
Із векторної діаграми видно, що магнітний потік статора
![]() .
(13.6)
.
(13.6)
Із
(13.6) слідує, що зі збільшенням струму
статора зменшується магнітний потік
![]() .
Це призводить до того, що зі збільшенням
струму
момент двигуна за умови
спочатку зростає, досягає максимального
значення
і потім знижується. Тому ц
.
Це призводить до того, що зі збільшенням
струму
момент двигуна за умови
спочатку зростає, досягає максимального
значення
і потім знижується. Тому ц ю
стратегію слід використовувати при
струмах статора, які менші від Ікр,
за якого
ю
стратегію слід використовувати при
струмах статора, які менші від Ікр,
за якого
![]() .
.
Таке
керування економічно доці-льне, бо за
СД споживає тільки активну потужність
![]()
![]() і струм статора мінімаль-ний (рис.5.15,б).
і струм статора мінімаль-ний (рис.5.15,б).
2
Рис.13.4.
Векторна діаграма при
З векторної діаграми видно,що
![]() .
(13.7)
.
(13.7)
Оскільки
![]() і
і
![]() ,
то вираз (13.7) зводиться до виду
,
то вираз (13.7) зводиться до виду
![]()
 .
(13.8)
.
(13.8)
З
Рис.13.5.
Векторна діаграма при
Контрольні запитання
1. Які можливі стратегії керування синхронним двигуном?
2. За якої умови СД випадає із синхронізму?
3. Що представляє собою вентильний двигун на базі трифазного СД?
4. Яка роль давача положення ротора в системі керування венти-льним двигуном?
5.
З яких контурів складається система
керування вентильним двигуном за
стратегії
![]() ?
?
6. Які стратегії керування використовують при керуванні СД зі збудженням від постійним магнітів?
7. Чому в СД з явно вираженими полюсами виникає реактивний електромагнітний момент?
8. Як змінюється електромагнітний момент СД при керуванні за умови ?
9. Як змінюється електромагнітний момент СД при керуванні за умови ?
10. За якої умови керування СД з постійними магнітами спожи-вана потужність буде мінімальною?
Розділ 14