

Частотне керування синхронними електроприводами
13.1. Стратегії керування
Нині сфера використання регульованого синхронного електро-привода постійно розширюється із-за можливості регулювання і швидкодіючих систем керування. Синхронні двигуни (СД) великої потужності з електромагнітним збудженням використо-вують для привода вентиляторів, помп, компресорів, валків прокат-них станів, папероробних машин та інших механізмів, а СД з по-стійними магнітами потужністю до десяти кіловат – для привода робочих органів металообробних верстатів з числовим програмним керуванням, роботів, маніпуляторів та інших механізмів, де потрі-бен широкий діапазон регулювання швидкості і високі динамічні показники.
Для живлення СД використовують ті самі перетворювачі часто-ти, що й для асинхронних двигунів. Але стратегії керування дещо інші, бо СД має незалежний від струму в обмотці статора струм збудження.
Коли
магнітні поля статора і ротора обертаються
з однаковою швидкістю і мають просторовий
кут зсуву
![]() ,
то електромагнітний момент
,
то електромагнітний момент
![]() .
(13.1)
.
(13.1)
З (13.1) витікають такі стратегії керування моментом двигуна:
регулювання магнітного потоку ротора
 (струму
збудже-ння);
(струму
збудже-ння);регулювання струму статора
 ,
підтримуючи кут
,
підтримуючи кут

 перезбудженого двигуна на певному
рівні;
перезбудженого двигуна на певному
рівні;при
 регулювати струм
так, щоб
.
регулювати струм
так, щоб
.
При сталому або плавнозмінному навантаженні, а також при плавному регулюванні швидкості, зазвичай, використовують ті самі методи керування (скалярне чи векторне), що й асинхронними дви-гунами. Окрім того, використовують також ті самі закони регулю-вання напруга-частота. У цих випадках синхронний двигун як і асинхронний живиться від інтертора з незалежним заданням частоти. При цьому можуть використовуватись як автономні інвертори напруги, так і струму.
За швидкої (близької до ударної) зміни навантаження чи швидкої зміни задання швидкості може порушитись синхронне обертання магнітних полів статора і ротора. В результаті момент
![]() (13.2)
(13.2)
стане пульсуючим і його середнє значення буде дорівнювати нулю. Під дією моменту сил опору двигун буде гальмуватись і зупиниться – відбудеться “перекидання” двигуна. Цього можна запобігти, якщо незалежне керування інвертором замінити керуванням інвертором у залежності від швидкості обертання ротора за допомогою давача положення ротора (ДПР). Синхронний двигун з такою системою ке-рування називається вентильним двигуном (ВД).
Синхронні двигуни зі збудженням від постійних магнітів, як пра-вило, керуються за схемою вентильного двигуна. Це дозволяє регу-лювати швидкість практично в необмеженому діапазоні, включаю-чи покроковий режим, без загрози “перекидання”, а також забезпе-чити високу стійкість і швидкодію. У порівнянні з двигунами пос-тійного струму ВД мають кращі динамічні, габаритні й вартісні по-казники.
13.2. Вентильний двигун
Вентильні двигуни є різної конструкції. Найбільше поширеною є конструкція на базі трифазного синхронного двигуна зі збудженням від постійних магнітів в (рис.13.1.). У цьому двигуні обмотка стато-ра живиться від регульованого джерела постійного струму через трифазний мостовий комутатор, який складається із шести керова-них транзисторних ключів К1-К6. Ключі пронумеровані у порядку їх комутації з кутовим інтервалом 60 електричних градусів. Для наведеної на рис.13.1 конструкції електричні градуси співпадають з геометричними.
Керування ключами інвертора струму (ІС) здійснює давач поло-ження ротора (ДПР), ротор якого має вид сегмента, жорстко зв’яза-ного з ротором двигуна (рис.13.1,а). На нерухомій частині давача розташовано шість чутливих елементів, які пронумеровані цифрами 1-6 як і ключі інвертора.
а

б
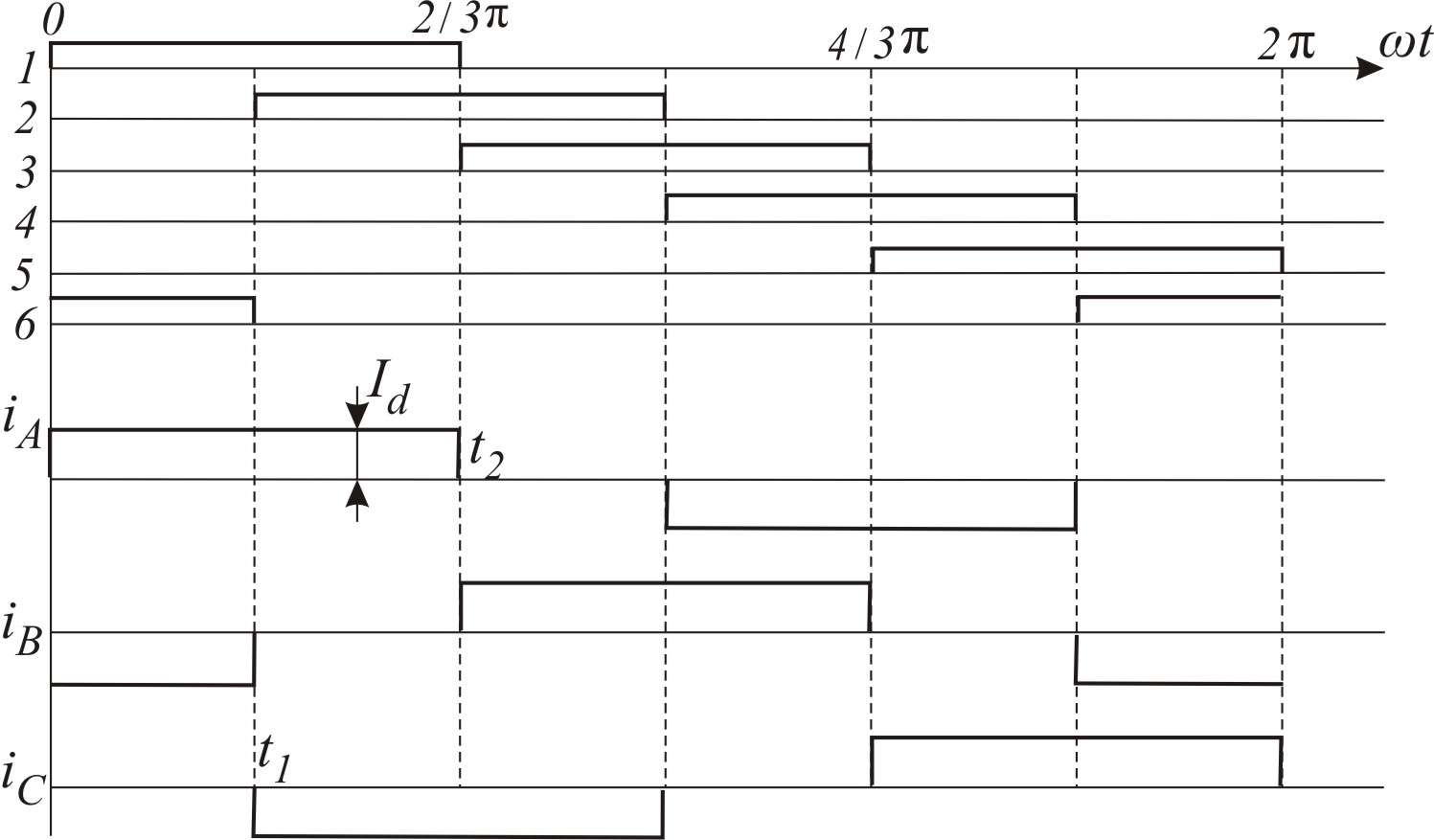
Рис.13.1. Вентильний двигун: а – структура двигуна, б – алгоритм включення ключів інвертора і фазні струми
Коли
сегмент перекриває чутливий елемент,
він активізується і через систему
керування інвертором (СКІ) переводить
ключ комута-тора у замкнений стан, в
якому ключ буде знаходитись доти, доки
чутливий елемент перекривається
сегментом. За такого алгоритму в любий
момент часу замкненими будуть один ключ
із групи 1-3-5 і один із групи 4-6-2 і струм
буде протікати через дві фазні обмотки
статора, зміщені у просторі на кут
![]() .
На такий же кут будуть зміщенні і магнітні
потоки фаз.
.
На такий же кут будуть зміщенні і магнітні
потоки фаз.
При
![]() ДПР займає положення, яке відповідає
замкненим ключам 1 і 6. Тоді вектор
магнітного потоку ротора
буде напра-вленим по осі
ДПР займає положення, яке відповідає
замкненим ключам 1 і 6. Тоді вектор
магнітного потоку ротора
буде напра-вленим по осі
![]() системи координат
системи координат
![]() ,
яка рухається разом з ротором (рис.
13.1,а). На рис.13.2 показано струми в обмотках
стато-ра і положення векторів магнітних
потоків для трьох моментів часу, які
пояснюють процес обертаних ротора.
,
яка рухається разом з ротором (рис.
13.1,а). На рис.13.2 показано струми в обмотках
стато-ра і положення векторів магнітних
потоків для трьох моментів часу, які
пояснюють процес обертаних ротора.
а
б
в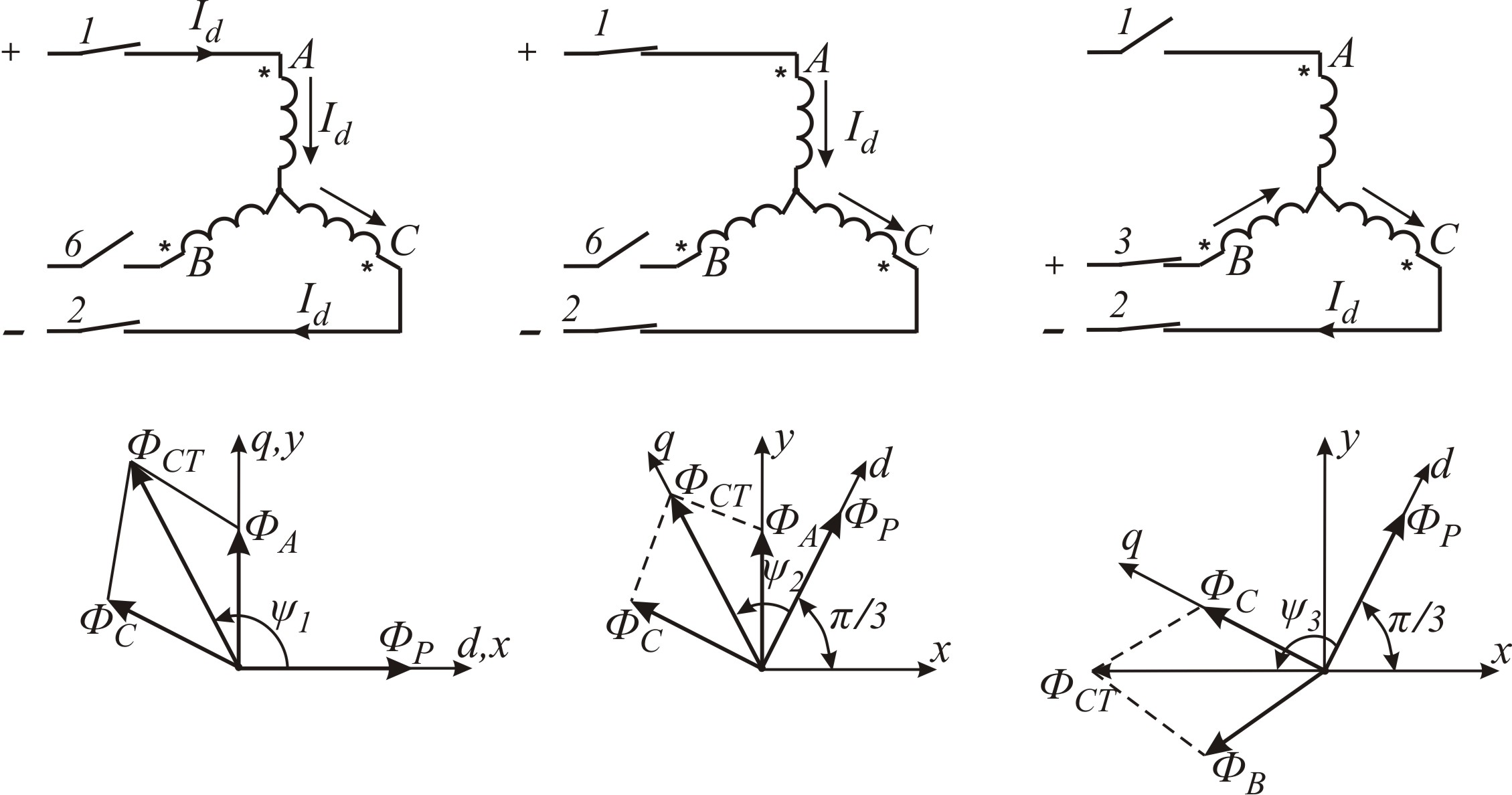
Рис.13.2.
Положення векторів магнітних потоків:
а –
![]() ;
;
б
–
![]() і в –
і в –
![]()
Нехай
ротор обертається проти годинникової
стрілки. Тоді в момент часу
розмикається ключ 6 та замикається ключ
2 і струм
буде протікати від початку до кінця
фази
![]() і від кінця до початку фази С. Цим напрямам
струмів відповідають положення векторів
магнітних потоків
і від кінця до початку фази С. Цим напрямам
струмів відповідають положення векторів
магнітних потоків
![]() ,
,
![]() і результуючого потоку статора
і результуючого потоку статора
![]() ,
як показано на рис.13.2,а. У цей же
момент
ротор знаходиться в положенні, зображеному
на рис.13.1,а, і його магнітний потік
,
як показано на рис.13.2,а. У цей же
момент
ротор знаходиться в положенні, зображеному
на рис.13.1,а, і його магнітний потік
![]() співпадає з віссю
.
За такого розташування векторів магнітних
потоків двигун розвиває електромагнітний
момент
співпадає з віссю
.
За такого розташування векторів магнітних
потоків двигун розвиває електромагнітний
момент
![]() ,
(13.3)
,
(13.3)
де
![]() – кут між векторами
і
,
рівний
– кут між векторами
і
,
рівний
![]() .
.
Під
дією цього електромагнітного моменту
ротор повертається проти годинникової
стрілки і кут
зменшується. Коли він змен-шиться до
![]() ,
момент згідно (13.3) досягне максимального
значення і в подальшому буде зменшуватись.
Коли кут
стане рівним
,
момент згідно (13.3) досягне максимального
значення і в подальшому буде зменшуватись.
Коли кут
стане рівним
![]() ,
момент двигуна зменшиться до значення,
яке він мав при
,
момент двигуна зменшиться до значення,
яке він мав при
![]()
![]() ,
а вектор
повернеться у просторі разом з ротором
двигуна на кут
і займе положення, показане на рис.
13.2,б. Якщо стан ключів комутатора не
змінити, то ротор буде рухатись далі
доти, доки кут
не стане рівним нулю. При
,
а вектор
повернеться у просторі разом з ротором
двигуна на кут
і займе положення, показане на рис.
13.2,б. Якщо стан ключів комутатора не
змінити, то ротор буде рухатись далі
доти, доки кут
не стане рівним нулю. При
![]() згідно (13.2)
і ротор зупиниться.
згідно (13.2)
і ротор зупиниться.
Щоби
цього не сталося, при
![]() ДПР через СКІ зумовлює розмикання ключа
1 і замикання ключа3. В результаті струм
проті-катиме по фазах В і С, вектор
при нехтуванні перехідним про-цесом
стрибком повернеться на кут
(рис.13.2,в), кут
стане рівним
і ротор буде далі обертатися. Описаний
цикл повторюється. Напрям руху задається
знаком керуючого впливу
ДПР через СКІ зумовлює розмикання ключа
1 і замикання ключа3. В результаті струм
проті-катиме по фазах В і С, вектор
при нехтуванні перехідним про-цесом
стрибком повернеться на кут
(рис.13.2,в), кут
стане рівним
і ротор буде далі обертатися. Описаний
цикл повторюється. Напрям руху задається
знаком керуючого впливу
![]() ,
який подається на СКІ.
,
який подається на СКІ.
За
такого керування момент двигуна на
кожному такті буде змінюватися за
синусоїдним законом від початкового
значення
![]() ,
досягаючи максимального значення
,
досягаючи максимального значення
![]() при
при
![]() і до кінцевого
і до кінцевого
![]()
![]() .
При такій змінні моменту зміна швидко-сті
буде тим менша, чим більший момент
інерції привода, що є основним недоліком
такого способу керуванню. Цей недолік
можна усунути, якщо за допомогою
відповідної модуляції забезпечити
синусоїдну форму струму в обмотках
статора. Але і при цьому зміна навантаження
буде впливати на швидкість двигуна.
Тому таку систему доповнюють контуром
регулювання швидкості.
.
При такій змінні моменту зміна швидко-сті
буде тим менша, чим більший момент
інерції привода, що є основним недоліком
такого способу керуванню. Цей недолік
можна усунути, якщо за допомогою
відповідної модуляції забезпечити
синусоїдну форму струму в обмотках
статора. Але і при цьому зміна навантаження
буде впливати на швидкість двигуна.
Тому таку систему доповнюють контуром
регулювання швидкості.