

5.2. Регулювання швидкості асинхронних двигунів
Регулювання швидкості зміною напруги живлення обмотки статора досягається за допомогою тиристорного регулятора напруги з фазо-імпульсним керуванням семісторів. Змінюючи кут керування семісторів, можна плавно регулювати діюче значення напруги. За такого керування критичний момент зменшується пропорційно квадрату пониження напруги:
![]() .
(5.7)
.
(5.7)
К
Рис.5.4.
Механічні характеристики для різних
напруг (Uн>U1>U2)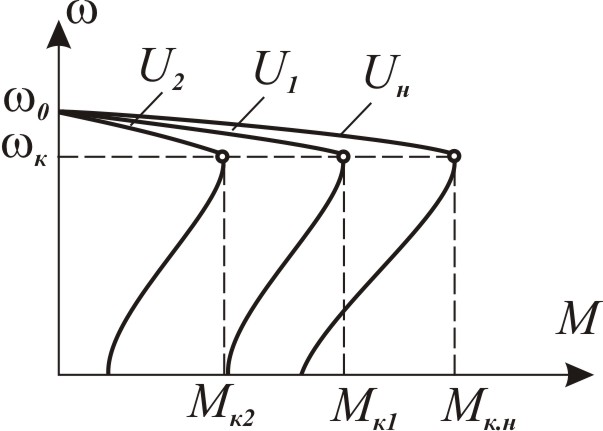 ритичне
ковзання не залежить від напруги (формула
5.6) і зали-шається сталим. На рис.5.4.
зобра-жені характеристики для різних
значень діючої напруги. З цього ри-сунка
слідує, що діапазон регулю-вання
незначний. Зі зниженням швидкості
збільшуються втрати в обмотці ротора
ритичне
ковзання не залежить від напруги (формула
5.6) і зали-шається сталим. На рис.5.4.
зобра-жені характеристики для різних
значень діючої напруги. З цього ри-сунка
слідує, що діапазон регулю-вання
незначний. Зі зниженням швидкості
збільшуються втрати в обмотці ротора
![]() .
То-му регулювання швидкості зміною
напруги є неекономічним і його можна
використовувати лише в ко-роткочасному
режимі роботи дви-гунів малої потужності.
.
То-му регулювання швидкості зміною
напруги є неекономічним і його можна
використовувати лише в ко-роткочасному
режимі роботи дви-гунів малої потужності.
Регулювання швидкості асинхронних двигунів зміною числа
пар полюсів слідує із залежності
![]() .
(5.8)
.
(5.8)
Оскільки число пар полюсів може бути тільки цілим числом, то регулювання буде ступінчастим, зазвичай, у відношенні 2 : 1. Таке регулювання можливе лише двигунів з короткозамкненим ротором, де переключення числа полюсів обмотки статора призводить до автоматичної зміни числа полюсів обмотки ротора. Цього не відбу-вається у двигуні з фазним ротором. Тому регулювати їх швидкість таким способом не можна.
а
б
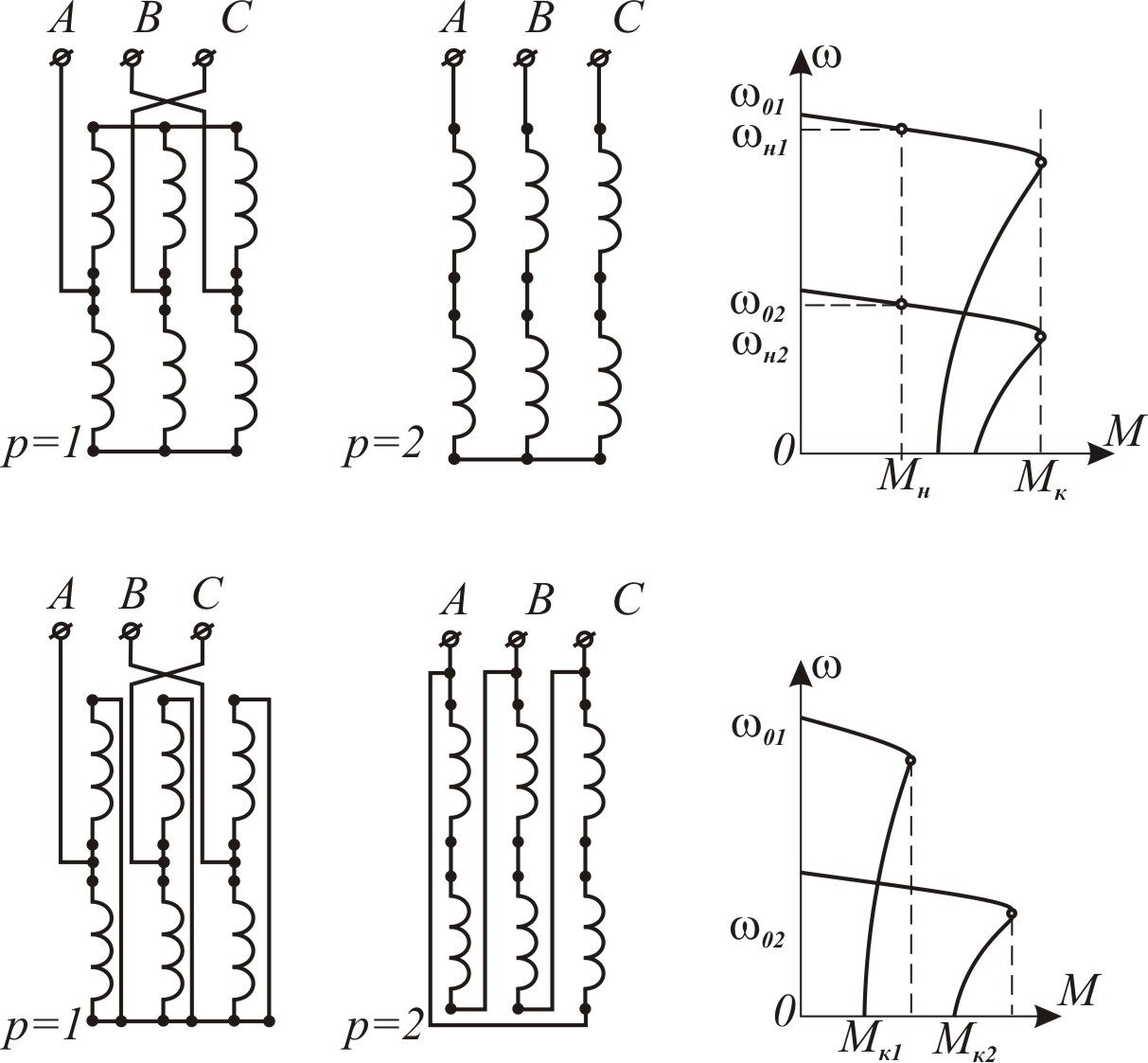
Рис.5.5. Схеми переключення обмоток статора (а) і механічні характеристики (б)
Для здійснення переключення фазні обмотки розділяють на дві напівобмотки (рис.5.5,а). Їх з’єднують так, щоб збільшити число вдвоє і при цьому не змінився напрям обертання двигуна.
В
залежності до потреб виробничих
механізмів переключення виконують аби
момент двигуна був сталим
![]() ,
аби ста-лою була потужність
,
аби ста-лою була потужність
![]() .
.
Якщо потрібно мати чотири швидкості, то у статорі розміщують дві обмотки, кожну з яких ділять на папівобмотки. У цьому випадку діапазон регулювання може складати 6 : 1 (3000 : 500 об/хв.). Регу-лювання переключенням числа пар полюсів є економічним і широ-ко використовується там, де потрібне ступінчасте регулювання (металообробні верстати, вентилятори, помпи та інші виробничі механізми). Недолік – велика кількість силової комутуючої апаратури.
Регулювання
швидкості
зміною частоти напруги живлення слі-дує
з формули (5.8). Але одночасно із зміною
частоти необхідно змінювати й напругу,
бо напруга
![]() .
Отже, зміна частоти за
умови
.
Отже, зміна частоти за
умови
![]() призведе
до відповідної
зміни
магнітного потоку. Так, за зменшення
зростає потік
,
насичується сталь статора і як наслідок
– різко зростає струм і двигун
перегрівається. Коли
збільшувати проти частоти живлення, то
потік зменшується, що призводить до
зменшення допустимого моменту. Тому з
метою повного використання асинхронного
двигуна необхідно підтримувати певне
співвідношення між частотою і напругою
з врахуванням залежності моменту опору
виробничого механізму від швидкості.
призведе
до відповідної
зміни
магнітного потоку. Так, за зменшення
зростає потік
,
насичується сталь статора і як наслідок
– різко зростає струм і двигун
перегрівається. Коли
збільшувати проти частоти живлення, то
потік зменшується, що призводить до
зменшення допустимого моменту. Тому з
метою повного використання асинхронного
двигуна необхідно підтримувати певне
співвідношення між частотою і напругою
з врахуванням залежності моменту опору
виробничого механізму від швидкості.
Наближено
це співвідношення знаходять, знехтувавши
активним опором обмотки статора
.
Тоді критичний момент
![]()
 буде визначатись за формулою
буде визначатись за формулою
 ,
(5.9)
,
(5.9)
де
![]() – індуктивний опір короткого зами-кання;
– індуктивний опір короткого зами-кання;
![]() – стала величина.
– стала величина.
Двигун
за моментом буде використовуватись
повністю, якщо для будь-якої частоти
![]()
 (5.10)
(5.10)
буде величиною сталою.
В
(5.10)
– механічна характеристика виробничого
меха-нізму;
![]() – фазна напруга, яка відповідає частоті
.
– фазна напруга, яка відповідає частоті
.
З
(5.10) слідує, що для будь-яких двох значень
частот
і
![]() за частотного регулювання повинно
зберігатися співвідношення:
за частотного регулювання повинно
зберігатися співвідношення:
 .
(5.11)
.
(5.11)
Прийнявши
один із режимів за номінальний
![]() ,
,
![]() і
і
![]() ,
матимемо
,
матимемо
 .
(5.12)
.
(5.12)
Рівняння (5.12) встановлює співвідношення між частотою, напругою живлення і характером навантаження. Для основних видів навантаження залежність (5.12) матиме такий вид:
для . Підставивши в (5.12)
 ,
одержимо
,
одержимо
![]() ;
(5.13)
;
(5.13)
для
 маємо
маємо
 за умови
за умови
 .
Звідки
.
Звідки
![]() ;
(5.14)
;
(5.14)
для вентиляторної характеристики за умови
 мати-мемо
мати-мемо
 .
Звідки закон регу-лювання напруги і
частоти
.
Звідки закон регу-лювання напруги і
частоти
![]() .
(5.15)
.
(5.15)
Згідно до законів регулювання (5.13), (5.14) і (5.15) на рис.5.6 наведено механічні характеристики для частот більших і менших від номінальної.
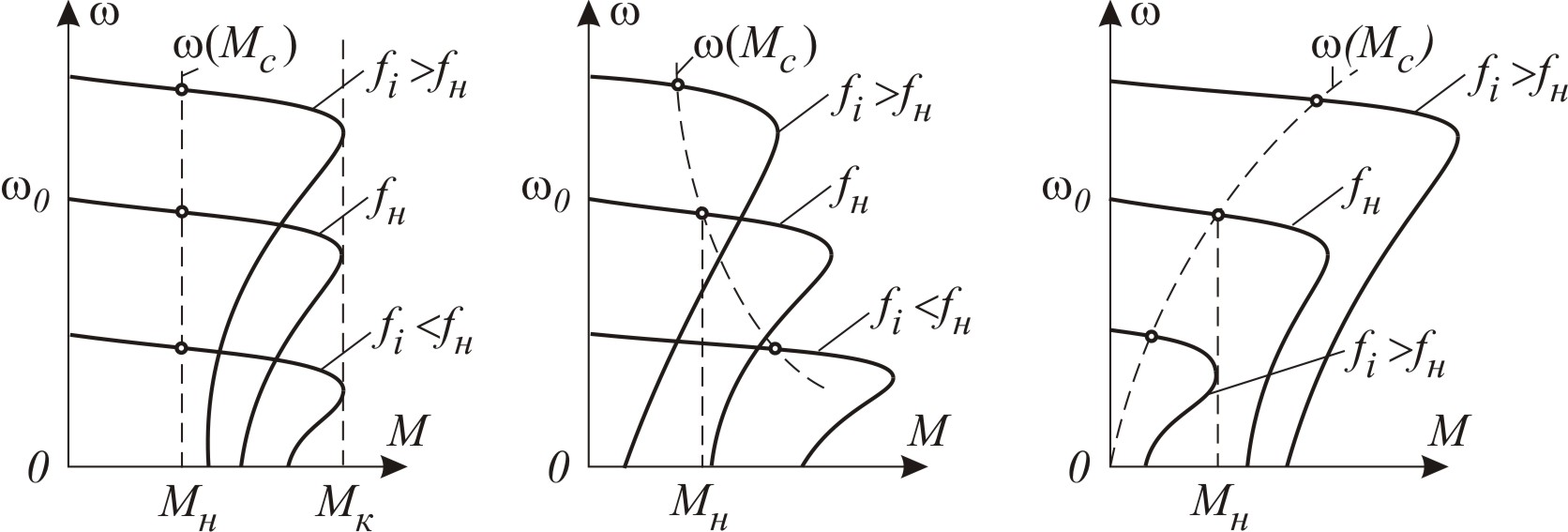
Рис.5.6. Механічні характеристики при різних законах частотного керування