

4.2. Системи імпульсно-фазового керування
Регулювання
вихідної напруги КВ полягає у зміщенні
вмикання тиристорів відносно точки
натуральної комутації, тобто за рахунок
зміни кута
керування
![]() .
За
.
За
![]() випрямлена напруга максималь-на. Цей
процес здійснює СІФК, яка постійну
напругу керування
перетворює
у
послідовність
імпульсів
регульованої
фази
(зміщення),
які подаються на керуючі електроди
тиристорів.
випрямлена напруга максималь-на. Цей
процес здійснює СІФК, яка постійну
напругу керування
перетворює
у
послідовність
імпульсів
регульованої
фази
(зміщення),
які подаються на керуючі електроди
тиристорів.
Процес
регулювання напруги розглянемо на
прикладі перетво-рювача за трифазною
нульовою схемою, який живить обмотку
збудження електродвигуна (індуктивне
навантаження) (рис.4.6,а). За умови
![]() ,
де
,
де
![]() і
і
![]() – відповідно індуктивний і актив-
– відповідно індуктивний і актив-
а
б
Рис.4.6. Трифазна нульова схема включення тиристорів (а) і часові діаграми випрямлених напруг і струмів (б)
ний опори кола постійного струму, випрямлений струм вважають неперервним і ідеально згладженим. Із-за індуктивності кола пос-тійного струму перехід струму від одного тиристора до другого проходить не миттєво, а за певний проміжок часу.
На
проміжку часу
![]() відкритий тиристор
відкритий тиристор
![]() ;
в момент
;
в момент
![]() ,
що відповідає куту
керування
,
відкривається
,
що відповідає куту
керування
,
відкривається
![]() ,
починається процес комутації струму.
На відрізку
,
починається процес комутації струму.
На відрізку
![]() відкриті обидва тирис-тори. За протидії
ЕРС самоіндукції, які виникають у фазних
колах, струм
відкриті обидва тирис-тори. За протидії
ЕРС самоіндукції, які виникають у фазних
колах, струм
![]() поступово
спадає,
а
струм
поступово
спадає,
а
струм
![]() – зростає і їх сума залишаєть-ся сталою
і рівною випрямленому струму
.
В кінці комутації (момент
– зростає і їх сума залишаєть-ся сталою
і рівною випрямленому струму
.
В кінці комутації (момент
![]() )
струм
)
струм
![]() ,
а
,
а
![]() .
Проміжок часу
називає-ться кутом
комутації
.
Проміжок часу
називає-ться кутом
комутації
![]() .
.
В
період комутації випрямлена напруга
![]() і змі-нюється як показано на рис.4.6,б. У
кінці комутації напруга стриб-ком
досягає фазного значення (заштриховані
ділянки на рис.4.6,б).
і змі-нюється як показано на рис.4.6,б. У
кінці комутації напруга стриб-ком
досягає фазного значення (заштриховані
ділянки на рис.4.6,б).
Середнє значення випрямленої напруги
![]() ,
(4.1)
,
(4.1)
де
![]() – середнє значення випрямленої напруги
при
;
– середнє значення випрямленої напруги
при
;
![]() – діюче значення фазної напруги;
– число фаз;
– діюче значення фазної напруги;
– число фаз;
![]() ,
,
![]() – приведені до вторинної обмотки
індуктивний і активний опори трансформатора;
– приведені до вторинної обмотки
індуктивний і активний опори трансформатора;
![]() – опір відритого тиристора;
– актив-ний опір згладжуючої індуктивності.
– опір відритого тиристора;
– актив-ний опір згладжуючої індуктивності.
На
рис.4.6,б показані діаграми напруг і
струмів, коли кут керува-вання відповідає
моменту проходження напругою через
нуль
![]()
![]() .
За більших кутів керування індуктивність
в колі постійного струму призводить до
того, що після проходження напруги через
нуль
відкритий
раніше
вентиль
продовжує проводити струм за раху-нок
енергії, накопиченої в індуктивності.
.
За більших кутів керування індуктивність
в колі постійного струму призводить до
того, що після проходження напруги через
нуль
відкритий
раніше
вентиль
продовжує проводити струм за раху-нок
енергії, накопиченої в індуктивності.
Якщо індуктивність велика, то вентиль проводитиме струм доти, поки не буде поданий відкриваючий імпульс на наступний, і струм матиме неперервних характер. Коли енергії, накопиченої в індук-тивності недостатньо, то вентиль, який проводить струм, закриється раніше, ніж відкриється наступний і як наслідок – струм стане пере-ривчастим.
Режим роботи перетворювача, коли струм у вентилях спадає до нуля у момент відкриття наступного вентиля, називається гранич-ним.
Мінімальна додаткова індуктивність, яка відповідає граничному режиму
![]() ,
(4.2)
,
(4.2)
д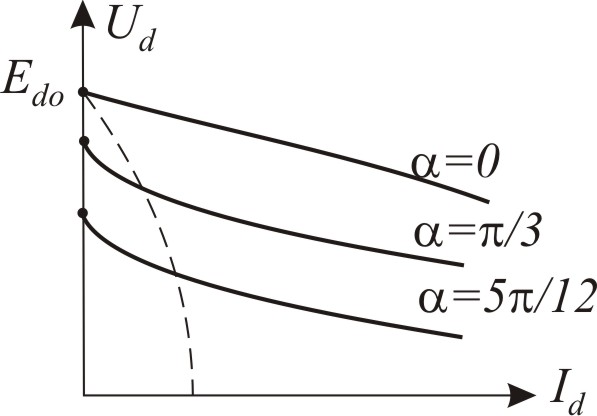 е
е
![]() і
і
![]() – питомі діючі значення першої гармоніки
випрямленої напруги і струму;
– питомі діючі значення першої гармоніки
випрямленої напруги і струму;
![]() – кутова частота першої гармоніки;
– кутова частота першої гармоніки;
![]() – номінальний струм двигуна;
– номінальний струм двигуна;
![]() ,
,
![]() і
і
![]() – відпо-відно індуктивності якоря
двигуна, силового трансформатора і
згла-джуючого реактора. У формулі (4.2)
слід приймати
– відпо-відно індуктивності якоря
двигуна, силового трансформатора і
згла-джуючого реактора. У формулі (4.2)
слід приймати
![]() ,
а
,
а
![]() знаходити із залежності
знаходити із залежності
![]() .
.
Р
Рис.4.7. Зовнішні
характеристики КВ![]() і
залежать від величини струму, бо
накопичена електромагнітна енергія
і
залежать від величини струму, бо
накопичена електромагнітна енергія
![]()
![]() .
На рис.4.7 показано характеристики
.
На рис.4.7 показано характеристики
![]() ,
по-будовані за формулою (4.1). На них
пунктиром відокремлена зона переривчастих
струмів, яка розширюється при збільшенні
кута керування
.
,
по-будовані за формулою (4.1). На них
пунктиром відокремлена зона переривчастих
струмів, яка розширюється при збільшенні
кута керування
.
Розглянемо найбільше поширену напівпровідникову СІФК, яка побудована за вертикальним принципом. Цей принцип полягає у тому, що напруга керування порівнюється зі змінною напругою (пилкоподібною, косинусоїдною чи трикутною) і коли ці напруги стають рівними, формується керуючий імпульс (рис. 4.8).
СІФК складається з пристрою синхронізації ПС, фільтра Ф, порогового елемента ПЕ, генератора пилкоподібної напруги ГПН, порівняльного пристрою (компаратора) ПП, формувача імпульсів ФІ, підсилювача імпульсів ПІ, розподільника імпульсів РІ і ввідного пристрою ВП.
Пристрій
синхронізації ПС представляє собою
трансформатор, який здійснює синхронізацію
напруги живлення тиристорів і напру-ги
живлення СІФК, одночасно забезпечуючи
гальванічне розділен-ня системи керування
і мережі. Напруга з ПС подається на
фільтр
,
який здійснює зсув напруги на
![]() для трифазних перетворювачів і фільтрує
високочастотні завади.
для трифазних перетворювачів і фільтрує
високочастотні завади.

Рис.4.8. Функціональна схема СІФК з вертикальним керуванням
Пороговий елемент ПЕ перетворює синусоїдну напругу у прямокутну і періодично запускає генератор пилкоподібної напруги ГПН. З виходу ГПН напруга надходить на порівняльний пристрій ПП, де порівнюється з напругою керування . У момент рівності цих напруг ПП виробляє напругу, яка запускає формувач імпульсів ФІ. Останній виробляє керуючий імпульс, який після підсилення ПІ подається на розподільник імпульсів РІ.
Розподільник РІ послідовно подає керуючі імпульси на пари тиристорів відповідно до циклограми комутації, зображеної на рис.4.4. Ввідний пристрій ВП, у складі якого є імпульсний транс-форматор, подає керуючі імпульси на тиристори і одночасно гальва-нічно розділяє кола керування.
Статичною
характеристикою перетворювача, як ланки
системи автоматичного керування, є
залежність „вихід
- вхід”
![]() .
Якщо
.
Якщо
![]() ,
то характеристика має вид, наведений
на рис.4.9,а. Зазвичай напруга керування
є стандартною:
,
то характеристика має вид, наведений
на рис.4.9,а. Зазвичай напруга керування
є стандартною:
![]()
![]() для реверсивних перетворювачів і
для реверсивних перетворювачів і
![]() для неревер-сивних.
для неревер-сивних.
Динамічні властивості тиристорного перетворювача визначає пе-редавальна функція
![]() ,
(4.3)
,
(4.3)
де
![]() – стала часу перетворювача, яку приймають
рівною
– стала часу перетворювача, яку приймають
рівною
![]() ;
;
![]() – передавальний коефіцієнт, який
визначають з характеристики
– передавальний коефіцієнт, який
визначають з характеристики
![]() (рис.4.9,а).
(рис.4.9,а).
а
б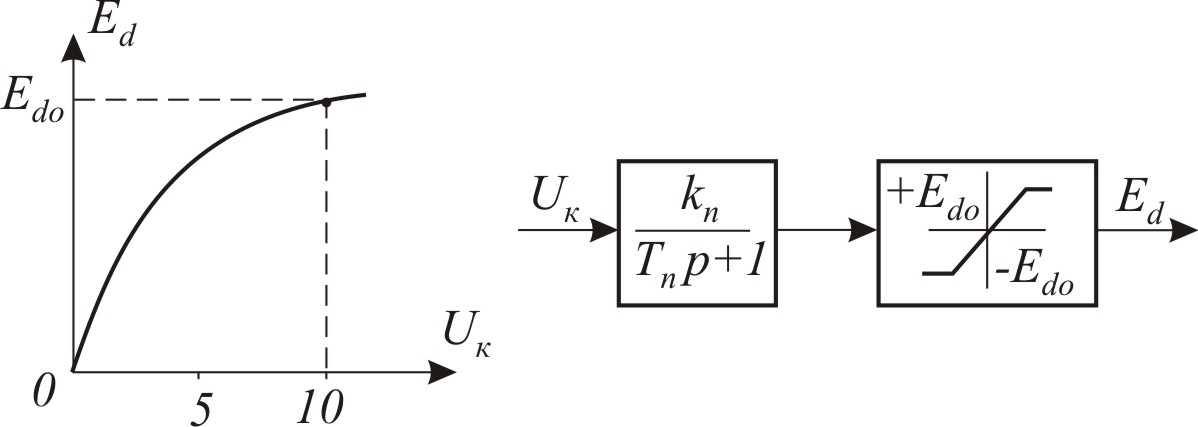
Рис.4.9. Статична характеристика ВК (а) і його математична модель (б)
Передавальна
функція (4.3) не враховує нелінійності
характерис-тики
і обмеження випрямленої ЕРС величиною
![]() .
Оскільки нелінійність незначна, то в
якості моделі ТП можна використати
модель, наведену на рис.4.9,б.
.
Оскільки нелінійність незначна, то в
якості моделі ТП можна використати
модель, наведену на рис.4.9,б.
Коефіцієнт корисної дії керованих перетворювачів визначається формулою
![]() ,
(4.4)
,
(4.4)
де
![]() ,
,
![]() ,
,
![]() – втрати активної потужності відповідно
в трансформаторі, вентилях і додаткові
(в згладжуючих дроселях, від дії вищих
гармонік тощо). ККД трансформаторів
знаходиться в межах 0,95...0,98. Втрати в
тиристорах визначає спад напруги в них,
який складає 1-1,2В. З врахуванням втрат
ККД перетворювачів знаходиться в межах
0,8...0,98. При цьому ККД більш високий мають
потужні перетворювачі і багатофазні,
зокрема, перетворювачі за трифазною
мостовою схемою.
– втрати активної потужності відповідно
в трансформаторі, вентилях і додаткові
(в згладжуючих дроселях, від дії вищих
гармонік тощо). ККД трансформаторів
знаходиться в межах 0,95...0,98. Втрати в
тиристорах визначає спад напруги в них,
який складає 1-1,2В. З врахуванням втрат
ККД перетворювачів знаходиться в межах
0,8...0,98. При цьому ККД більш високий мають
потужні перетворювачі і багатофазні,
зокрема, перетворювачі за трифазною
мостовою схемою.
Суттєвим недоліком КВ є те, що коефіцієнт потужності залежить від кутів керування й комутації:
![]() .
(4.5)
.
(4.5)
Залежність (4.5) показує, що зі збільшенням кута керування (зме-ншення ) збільшується реактивна потужність, яку споживає пе-ретворювач. Для її зменшення слід застосовувати конденсаторні чи синхронні компенсатори, а також, за можливістю, перезбуджувати синхронні двигуни, що буде економити витрати електроенергії.