

2.3. Прогнозирование состояний объекта на основе теории непрерывных цепей Маркова
В процессе эксплуатации переход объекта из одного состояния в другое происходит в случайные заранее неизвестные моменты времени. Описание состояний такого объекта производится при помощи аппарата непрерывных цепей Маркова.
Как и в предыдущих случаях, состояния являются фиксированными, сумма вероятностей которых равна единице, т. е. имеется полная группа событий ∑ Pi(t) = 1, где n — количество дискретных состояний.
Задача состоит в том, чтобы для любого момента времени определить вероятности состояний, т. е. Р1(t), …, Рn (t).
Введем вместо вероятностей переходов Рij плотности вероятностей fij.
Для малых интервалов времени Δt можно считать, что
![]()
или Pij(Δt) = fijΔt
Если fij не зависит от времени, то процесс называют однородным с непрерывным временем, если fij меняются во времени, то процесс называют неоднородным с непрерывным временем.
Вероятности состояний можно определить, если известен размеченный граф состоянии.
Рассмотрим процедуру определения вероятностей состояний на примере системы, заданной размеченным графом рис. 2.9.
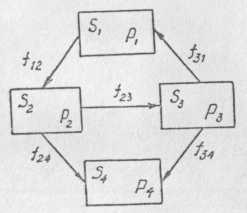
Рис. 2.9. Размеченный граф системы с дискретными состояниями и непрерывным временем
Найдем вероятность того, что система не вышла из состояния Si за время Δt. Система могла задержаться в состоянии Si с вероятностью P11(t+Δt), могла перейти в состояние S2 с вероятностью f12Δt, могла восстановиться за счет состояния S3, т. е. прибавить значение вероятности, равное Р3(t)*f31Δt. Обобщая можно записать
![]()
но
![]()
тогда
![]()
или
![]()
Устремив Δt→0, получим в пределе
![]()
Аналогично составим дифференциальные уравнения для других состояний, в результате получим систему уравнений
Полученную систему называют системой уравнений Колмогорова. Решая ее при нулевых начальных условиях, т. е. при t = 0, P1(0) = 1, P2(0) = … = P4(0) = 0, определяют вероятности состояний системы.
Для нахождения прогнозируемого времени, при котором вероятности состояний соответствуют допустимым значениям, следует решить уравнения
Заметим, что значения прогнозируемого времени для различных состояний исследуемого объекта в общем случае различно.
![]()
Рис. 2.10. Граф состояний системы, вытянутый в цепочку
Иногда можно использовать предельные состояния вероятностей, которые получают при t→∞. При этом приведенная выше система уравнений Колмогорова примет вид
Решив алгебраическую систему уравнений, находят предельные вероятности состояний.
Состояния системы могут быть представлены размеченным графом, вытянутым в цепочку (рис. 2.10). Методика определения вероятностей состояний остается прежней.
2.4. Прогнозирование качества из основе спектрального представления процессов, происходящих в конструкциях
Электронная аппаратура и ее отдельные устройства поддаются прогнозированию качества на основе анализа некоторых характеристик случайного процесса. Эффективными являются те характеристики, которые отражают определенный физический образ или причину возникновения отказов. В этом смысле наиболее удобна спектральная плотность или энергетический спектр случайного процесса.
Спектральная плотность характеризует распределение мощности случайного процесса по частотному диапазону. При исследовании детерминированных сигналов, особенно регулярных импульсных, широкое применение имеет гармонический анализ, позволяющий представить исследуемый сигнал в виде суммы спектральных гармонических составляющих. Применить непосредственно гармонический анализ к случайному процессу, описываемому, например функциями распределения, невозможно, однако, если известна корреляционная функция процесса, то рассматривая ее как неслучайную, можно определить энергетический спектр.
Корреляционная функция является четной, поэтому ее разложение на некотором интервале — Т ÷ + Т состоит из четных гармоник, оно называется спектром дисперсий:
![]() (2.1)
(2.1)
где коэффициент Dk определяется по формуле
 (2.2)
(2.2)
Спектр дисперсии, при разложении корреляционной функции на конечном интервале, является линейчатым (рис. 2.11).

Рис. 2.11. Линейчатый спектр дисперсии
Введем обозначение средней плотности дисперсии или спектральной плотности S(ωk) = Dk/Δω.
Следовательно, Dk = S(ωk)*Δω.
Подставив значение Dk в формулу (2.1), получим
![]()
При Т→∞ дискретный аргумент ωк переходит в непрерывный аргумент ω, а сумма — в интеграл, называемый интегралом Фурье, тогда
![]() (2.3)
(2.3)
Подставив значение Dk в формулу (2.2), получим
Учитывая, что Δω=2π/Т, находим
Устремив Т→∞ дискретный аргумент ωк переходит в непрерывный аргумент ω. В окончательном виде спектральная плотность получает значение
![]() (2.4)
(2.4)
Формулы (2.3), (2.4) представляют собой прямое и обратное преобразование Фурье. Они позволяют делать переход из временной области в частотную, и наоборот.
Интересным является случай, когда τ = 0. При этом
![]()
Таким образом, интеграл от спектральной плотности равен дисперсии. Этот результат исключительно важен. Он показывает, что площадь под кривой спектральной плотности равна средней мощности процесса, т. е. дисперсии.
В свою очередь, при ω=0
Следовательно, с точностью до множителя S(0) пропорциональна площади под кривой корреляционной функции.
Возвращаясь к вопросу прогнозирования, можно отметить, что спектральная плотность, являясь носителем информации о частотном составе случайного процесса в конструкции, может служить информативной характеристикой показателей качества.
Пример — прогнозирование форм дискретных сигналов в цепях ЭВМ, прогнозирование шумовых характеристик усилительных устройств, прогнозирование работоспособности электромеханических устройств систем охлаждения и т. д.
Дисперсия характеризует мощность исследуемого процесса, например, вибропроцесса, происходящего в конструкции. Если процесс стационарен, что соответствует нормальному функционированию объекта то dD/dt=0.
Если происходят изменения в конструкции, то они вызывают изменения вибропроцесса, а следовательно, дисперсия вибропроцесса изменяется. При известном исходном значении дисперсии Dисх и допустимом ее значении Dд можно определить прогнозируемое время tп работы объекта с учетом скорости изменения дисперсии
Описанный метод прогнозирования мало эффективен и аналогичен прогнозированию, рассмотренному ранее. Метод не дает ответа, в чем причины отказа, так как дисперсия не содержит информации о частотном содержании процесса. В связи с этим прогнозирование, основанное на анализе спектральных характеристик, является предпочтительным. В данном случае определенным участкам спектра или отдельным спектральным составляющим можно поставить в соответствие физический образ или причину возникновения рассматриваемых спектральных составляющих.
Предположим, что в конструкцию аппаратуры входит система принудительного охлаждения, в составе которой имеется электродвигатель. Спектр его собственных вибраций, обусловленный наличием вынужденных сил, известен. При установившемся движении ротора он является линейчатым. Первая гармоника проявляется на частоте вращения ротора ωр, она связана с его статической и динамической разбалансированностью, вторая спектральная составляющая ω2 возникает за счет овальности оси ротора и овальности внутреннего кольца подшипника. Аналогично можно установить и для других составляющих спектра вибрации двигателя физическую причину их возникновения. Следовательно, в данном случае при оценке состояния объекта оценивается качество отдельных элементов конструкции.
Таким образом, если известен линейчатый спектр вибрирующего объекта, имеющий вид
![]()
то, приписав физический признак каждой спектральной составляющей, можно организовать «инструментальное» наблюдение за процессом, а следовательно, и за скоростью изменения отдельных спектральных составляющих. Это позволяет определить прогнозируемое время работоспособности по отдельным параметрам
где xдi, xисхi — допустимое и исходное значение амплитуд вибрации соответственно.
Наименьшее из всех tпi является прогнозируемым временем работоспособности всего исследуемого объекта.
Аналогичные рассуждения могут быть отнесены и к непрерывному спектру. В этом случае физической причине возникновения вибрации приписываются отдельные участки спектра.
Описанную методику можно распространить на прогнозирование работоспособности различных объектов, включая ЭВМ. Необходимо лишь отслеживать спектры сигналов в основных сигнальных цепях при организации прогнозирования.