

Глава 2
ПРОГНОЗИРОВАНИЕ КАЧЕСТВА И СОСТОЯНИЙ КОНСТРУКЦИИ
2.1. Аналитический и вероятностный методы прогнозирования
Операцией прогнозирования назовем мероприятие, направленное на предсказание исправной работы объекта пли его состояний на некоторый наперед заданный момент времени и состоящее из постановки задачи, формирования математической модели, ее решения и оценки результатов.
Прогнозирование базируется на экспериментальных данных или статистическом материале о значениях показателей качества объекта в функции времени. Эти показатели являются исходными для построения эмпирических функций изменения параметров, которые затем используются для формирования математических моделей.
Результаты прогнозирования считаются удовлетворительными, если значения показателей качества на прогнозируемый период времени больше допустимых значений или ожидаемая вероятность безотказной работы Рф больше заданной Рд:
Рф≥Рд; Кiф≥Кiд
где Кiф, Кiд — значение фактическое i-ro показателя качества и допустимое.
Рассмотрим вначале аналитическое прогнозирование с использованием экстраполяции эмпирических функций. В общем случае предсказание качества базируется на результатах исследований технического состояния объекта или на статистических данных эксплуатации совокупностей сопоставимых объектов.
Учитывая изложенное, можно выделить два способа прогнозирования: 1) инструментальное (аналитическое), основанное на результатах исследования экспериментальным путем характеристик объекта; 2) статистическое (вероятностное), основанное на опыте и результатах эксплуатации сопоставимо подобных объектов.
Предположим, что исследуемый объект можно довольно полно охарактеризовать некоторым информативным показателем качества x(t). Известны его значения в некоторые моменты времени t1 и t2. Кроме того, известно его допустимое значение хд. Требуется определить значение показателя качества в момент времени tп по условиям прогнозирования.
В математическом смысле поставленная задача является задачей экстраполяции. Для ее решения воспользуемся экспериментальными данными.
Известны x(t1), x(t2). Требуется определить x(tп). В простейшем случае можно предположить, что показатель качества изменяется линейно, тогда функция изменения показателя качества опишется зависимостью x(t)=а+b(t).
Если найдены неизвестные а и b, то, подставив вместо t время, требуемое по прогнозу tп определим значение x(tп); если x(tп)>>хд, то объект будет работоспособным на прогнозируемом интервале времени.
На основе экспериментальных данных составим систему уравнений, которая позволяет рассчитать неизвестные а и b
Решив систему уравнений, получим
![]()
В данном случае произведено прогнозирование по двум точкам значения показателя качества, измеренным в моменты времени t1 и t2. Такой прогноз состоятелен, если заранее известна тенденция к монотонному изменению показателя качества.
Рассмотрим более сложный пример с оценкой точности эмпирических формул, используемых для построения прогноза. Предположим, что мы имеем экспериментально полученные значения прогнозируемого параметра x(t) для моментов времени
t1,t2,…,tn
Требуется определить значение x(t) для момента времени tk+1.
Значения параметра x(t) для дискретных моментов времени сведем в табл. 2.1.
Таблица 2.1
Значения x(t) |
x(t1) |
x(t2) |
… |
x(tk) |
x(tk+1) |
Дискретные моменты времени t |
t1 |
t2 |
… |
tn |
tk+1 |
Предположим, что закон изменения параметра описывается полиномом, например второй степени, т. е.
![]()
В нашем случае имеется избыточность значений x(ti), так как k > 3, а для определения коэффициентов нужно всего три значения x(ti). Чтобы решить, какие значения x(t) следует взять из таблицы, рекомендуется поступить следующим образом. Сначала из таблицы берут три первых значения, затем — три вторых и т.д. Составляют системы уравнений для каждой тройки значений x(ti), например для первой
![]()
Решив систему уравнений, рассчитывают а(1), b(1), с(1). Затем, поступая аналогично предыдущему, определяют значения неизвестных для второй группы уравнений, т. е. а(2), b(2), с(2) и т. д.
Таким образом, будем иметь столько коэффициентов, сколько групп. Допустим, их было s, тогда x(t) можно подсчитать по любой тройке коэффициентов
Теперь выясним, какая группа из 5 наиболее подходяща. Оценку произведем по погрешностям, которые получаются при расчете по каждой из формул. Результаты сведем в табл. 2.2.
Таблица 2.2
табличное |
Формула (1) |
|
Формула |
||
(ti) |
ξ |
|
(ti) |
ξ |
|
x(t1) |
x(1)(t1) |
ξ11 |
|
x(s)(t1) |
ξ(1)1 |
|
|
|
|
|
|
|
|
|
|
|
|
x(tk) |
x(1)(tk) |
ξ1k |
|
x(s)(tk) |
ξ(s)k |
|
|
∑ξi |
|
|
∑ξ(s)i |
Подсчитываем суммарные значения погрешности, полученные по каждой из формул:
Находим
минимальное значение
![]() .
Воспользуемся той из формул, которая
дает минимальное значение суммарной
погрешности. Пусть в нашем случае
это формула j.
тогда
.
Воспользуемся той из формул, которая
дает минимальное значение суммарной
погрешности. Пусть в нашем случае
это формула j.
тогда
![]()
Значение прогнозируемого параметра для времени tk+1 составит
![]()
Описанный метод прогнозирования является не единственным, однако он прост и позволяет получить удовлетворительные результаты. Этот метод называют методом средних.
Чтобы повысить точность, целесообразно увеличивать степень полинома.
Таким образом, с помощью метода средних по эмпирическим табличным значениям прогнозируемого параметра можно найти эмпирическую зависимость в виде полинома k-й степени (k = 1, ..., n) а затем определить значение прогнозируемого показателя качества.
Здесь мы решаем две задачи: определяем вид эмпирической зависимости и находим значение прогнозируемого параметра.
Рассмотрим графический метод описания экспериментально полученных зависимостей показателя качества подходящими эмпирическими формулами. Этот метод удобен для описания эмпирических зависимостей показательными функциями (рис. 2.1).
Предположим, что получены экспериментальные значения параметра x(t) в некоторые дискретные моменты времени t1 . . ., tk.
Сведем полученные значения х (ti) в табл. 2.3.
Таблица 2.3
Значения показателя качества х(ti) |
х(t1) |
х(t2) |
… |
х(tk) |
х(tk+1) |
Моменты времени ti |
t1 |
t2 |
… |
tk |
tk+1 |
Построим график дискретных значений x(ti) и оценим его качественно. Если исследуемая функция х(ti) не имеет особенностей, то, перейдя к непрерывному значению х(t), находим, что подходящей зависимостью для ее описания является x(t)=atb.
Логарифмируем показательную функцию
![]()
Перейдем к новым переменным, обозначив
![]() ,
,
тогда получим уравнение прямой. Построим ее в логарифмическом масштабе и проверим линейность Y = lga + bХ.
Чтобы определить неизвестные а и b, воспользуемся крайними значениями x(t1) и x(tk) из табл. 2.3. Составим систему уравнений
Имеем два уравнения и две неизвестные, следовательно, задача легко решается. Находим значение показателя качества в момент времени tk+1 x(tk+1)=atbk+1
Если x(tk+1) ≥ хд, то исследуемое изделие к моменту tk+1 будет исправным.
Удовлетворительные результаты при использовании графического метода получают при условии, что прогноз строится не более двух шагов вперед, т. е. для tk+2.
Рассмотрим операцию прогнозирования вероятности безотказной работы аппаратуры на основании статистических данных.

Рис. 2.1. График экспериментально полученных значений функции X(t)
Рис. 2.2. График изменения коэффициента усиления в функции времени
Возьмем для примера аналоговое устройство. Типичным представителем этих устройств является операционный усилитель.
В простейшем случае его основной информативный параметр коэффициент усиления K, характеризующий отношение выходной величины к входной, постоянен: K = Uвыx/Uвх, где Uвыx — выходной сигнал; Uвх — входной сигнал.
При наличии помех внутреннего и внешнего характера, например старения элементов, колебаний питающих напряжений, он может со временем изменяться. Следовательно, коэффициент усиления в общем случае является случайной функцией с математическим ожиданием mk. Факторы, вызывающие отклонение ΔK, многочисленны и имеют различную физическую природу, поэтому естественно предположить нормальность распределения отклонений ΔK (рис. 2.2).
Для любого технического устройства существуют допустимые изменения коэффициента усиления ±ΔK. Вероятность того, что коэффициент усиления не выйдет за допустимые значения, составляет

При нормальном распределении, учитывая симметричность плотности распределения и используя функции Лапласа, можно записать

Фактическая картина изменения коэффициента усиления во времени сложна, так как всегда присутствуют случайные дестабилизирующие факторы, связанные с износом, старением, изменением температуры, влажности и т. д.
В простейшем случае математическое ожидание коэффициента усиления описывается линейной функцией вида
![]()
где С — постоянный коэффициент старения.
Функция mk(t) изображена на рис. 2.2, где f(mk,t0), f(K1,t1)— плотности распределения в сечениях t0 и t1 соответственно.
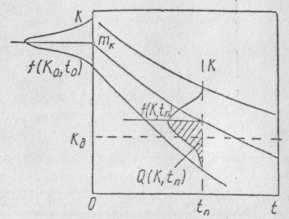
Рис. 2.3. График, поясняющий определение вероятности безотказной работы к моменту времени tn
В общем случае функция изменения математического ожидания может описываться полиномами более высших порядков, например второго или третьего: mk(t) = mк(0) — c1t — c2t2, mk(t) = mk(0) — c1t — c2t2 — c3t3, где с1, с2, c3 — некоторые коэффициенты, характеризующие скорость изменения или ускорения изменения К во временя.
По результатам эксплуатации установлено, что разброс коэффициента усиления со временем увеличивается, т. е. увеличивается его дисперсия.
При произвольном законе изменения математического ожидания коэффициента усиления вероятность его выхода за допустимое значение в момент времени tп (рис. 2.3):
Если известна плотность распределения коэффициента усиления в сечении tп, то нетрудно вычислить вероятность того, что коэффициент усиления не выйдет за допустимый предел Kд. Заметим, что при нелинейной функции mk(t) распределение плотности вероятности f(K,t) отлично от нормального в любом из сечений случайного процесса.
Задачу о нахождении вероятности недостижения в момент времени tп процессом значения Kд можно решить, используя плотность распределения случайного времени (рис. 2.4):
Если изделие характеризуется несколькими параметрами; то определяют вероятности недостижения этими параметрами допустимых значений и по минимальной полученной вероятности судят о наиболее опасном и критическом параметре.
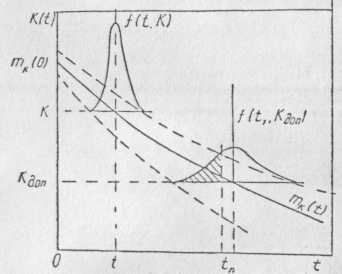
Рис. 2.4. График, поясняющий методику определения вероятности безотказной работы при изменении параметра К при эксплуатации
Каждый параметр, как правило, имеет присущий только ему закон плотности распределения параметра и его изменений во времени. Допустим, что объект характеризуется тремя параметрами а (t), b(t), c(t), которым определены допустимые значения ад, bд, сд (рис. 2.5). Найдем для некоторого момента времени tп вероятность безотказной работы объекта через вероятность отказа. Учитывая совместимость и предполагая независимость параметров, найдем

Следовательно, вероятность безотказной работы составит
![]()
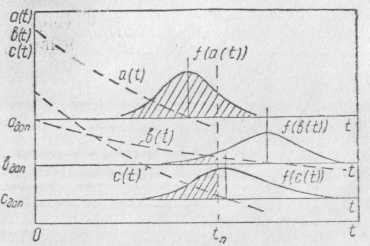
Рис. 2.5. График, поясняющий определение времени безотказной работы изделия по совокупности трех параметров
Подсчитывая вероятности безотказной работы по каждому из параметров, находят наиболее критичные параметры. Трудности при прогнозировании качества б данном случае связаны в основном с определением законов распределения параметров, которые могут быть получены лишь по результатам эксплуатации.
Если P(tп)≥ Pд(tп), то результаты прогнозирования вероятности безотказной работы до времени tп считаются положительными.
2.2. Прогнозирование состояний объекта на основе теории дискретных цепей Маркова
Основу технических средств современных сложных систем составляет электронная аппаратура. Так, ЭВМ — техническое средство вычислительных систем, систем автоматизации проектирования, систем управления сложными динамическими объектами и т. д. Рассмотрим задачу прогнозирования состояний объекта на примере вычислительной системы, являющейся сложным объединением однородных или разнородных технических устройств, которые могут находиться в различных состояниях, т. е. работать, быть в резерве, стоять на ремонте и т. д. Состояние вычислительного комплекса является случайным, зависящим от его загрузки или от состояния надежности. Последовательность состояний в функции времени можно рассматривать как случайный процесс. Оценить вероятности состояний вычислительного комплекса наиболее удобно с помощью теории марковских процессов (цепей).
Суть операции прогнозирования на основе теории дискретных цепей Маркова состоит в предсказании вероятности состояний объекта на некоторый наперед заданный шаг.
Постановка задачи заключается в формулировании условий операции, т. е. в описании объекта и определении цели. Исходя из поставленной задачи выбирают математическую модель. В данном случае применена модель марковских процессов с дискретными состояниями и дискретным временем [2].
Рассмотрим вопросы теории марковских процессов, которые будут использованы при решении операций прогнозирования состояний объекта.
Процесс является марковским, если для каждого момента времени t вероятность любого состояния в будущем (при t>t0) зависит только от ее состояния в настоящем, т. е. при t=t0 и не зависит от того, как протекал процесс в предыдущем, т. е. при t<t0
Широкое распространение получила теория процессов с дискретными состояниями. Это объясняется тем, что фактическое состояние объекта оценивается именно в дискретном плане (работает, не работает, ремонтируется, дежурит и т. д.).
Случайный процесс называют процессом с дискретным состоянием, если можно перечислить состояния системы Si одно за другим [2, 3]. Переход из одного состояния в другое происходит скачком.
Предположим, что вычислительная система состоит из двух вычислительных устройств. Возможны четыре состояния: S1 — оба устройства работают; S2 — одно отказало, а второе работает; S3 — второе отказало, а первое работает; S4 — оба устройства отказали.
Эти состояния отображены графом состояния (рис. 2.6).
Различают процесс с дискретным и непрерывным временем. Если переходы системы из одного состояния в другое происходят в строго определенные, заранее известные моменты времени, то такой процесс называют процессом с дискретным временем.
Если переход системы из одного состояния в другое происходит в заранее неизвестные моменты времени, то такой случайный процесс называют процессом с непрерывным временем.
Рассмотрим процесс с дискретным временем. Система может находиться в одном из состояний Si, S2, ..., Sn. Переход в эти состояния осуществляется в дискретные моменты времени t1, t2, …, tn. Эти моменты времени составляют шаги 1, 2, ..., n. Следовательно, последовательность состояний является функцией шагов, т. е. S1(l), S2(2), ..., Sn(n). Заметим, что система при некотором i-м шаге может не переходить в другое состояние, а оставаться в прежнем. Каждое состояние оценивается вероятностью, например, Pi(k). Это означает, что вероятность i-го состояния наступает при k-м шаге. Переход из состояния в состояние происходит с некоторой вероятностью Pij. Это означает, что из состояния i в состояние j система переходит с вероятностью Pij.
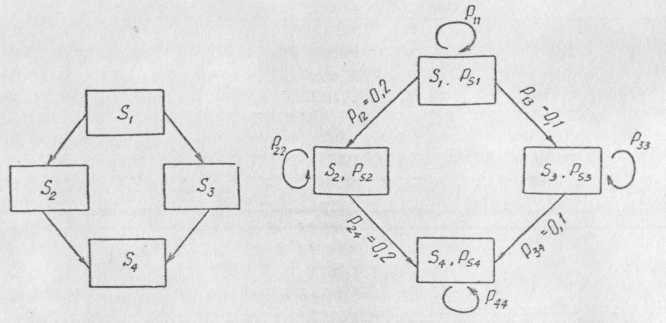
Рис. 2.6. Граф состояний системы
Рис. 2.7. Размеченный граф состояний
Всевозможные состояния при k-м шаге составляют полную группу, поэтому результирующая вероятность состояний равна единице при любом шаге.
Если известны вероятности переходов из одного состояния в другое и они не зависят от номера шага, то состояния системы составляют однородную марковскую цепь. Если система задержалась в некотором состоянии i, то вероятность неперехода записывается в виде Рii. Если вероятности переходов отшага к шагу изменяются, то такая цепь состояний называется неоднородной марковской цепью с дискретным временем.
Вероятность переходов для системы можно записать ввиде матрицы
Если некоторые вероятности переходов равны нулю, то переход системы из состояния в состояние невозможен. По главной Диагонали матрицы вероятностей переходов стоят вероятности непереходов, т. е. вероятности того, что система не перейдет в другое состояние, а задержится в прежнем состоянии.
Граф состояний, на котором приведены вероятности переходов, называют размеченным. Такой граф изображен на рис. 2.7. Для него справедливо
![]()
Эти уравнения используются для определения вероятностей неперехода системы из одного состояния в другое.
Имея размеченный граф состояний системы, найдем вероятности состояний для различных шагов.
Исходное состояние системы характеризуется вероятностями
![]()
При первом шаге вероятности состояний составляют
![]()
т. е. вероятности состояний равны вероятностям переходов.
При втором шаге
или
где i = 1, 2, .,., n.
Аналогично можно определить вероятность состояний для любого k-то шага
Эта формула может быть использована для определения номера шага, при котором достигается допустимое значение вероятности прогнозируемого состояния.
Алгоритм поиска номера шага для максимизируемых состояний записывается в виде
![]()
где ξ — некоторая величина, выбираемая из области допустимых отклонении значений вероятности прогнозируемых состояний.
Аналогично для минимизируемых состояний с той разницей, что допустимые значения вероятностей должны быть больше фактических.
Пример. Задан размеченный граф состояний (рис. 2.7), допустимое значение вероятности для третьего состояния Рз(k) = 0,2, ξ = 0,03. Требуется определить номер шага, при котором значение вероятности третьего состояния окажется в допустимых пределах.
Решение. Определим вероятности непереходов
Составим матрицу вероятностей переходов
Определим вероятности состояний для нулевого и первого шагов
при
нулевом шаге
![]()
при первом шаге
![]()
Вычислим вероятности состояний для второго шага
Проверяем:
Условие выполняется. Шаговый процесс продолжаем. При третьем шаге
Проверяем:
При проверке условия оказывается, что (Рiд(3) — Рiф(3)) < ξ, но больше нуля, следовательно, операция прогнозирования состояний объекта выполнена, число шагов равно трем.
На основании полученных результатов для наглядности решения построим график вероятностей состояний вычислительного комплекса (рис. 2.8).
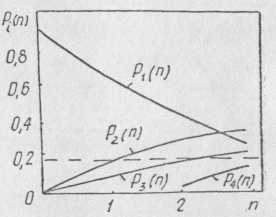
Рис. 2.8. График состояний вычислительного комплекса
В более общем случае вероятности состояний системы описываются неоднородной марковской цепью. В этом случае вероятности переходов Рij являются функциями шагов, т. е. зависят от номера шага. Тогда вероятность Si-гo состояния находится по формуле
![]()
Таким образом, для вычисления вероятностей состояний необходимо иметь заданную последовательность матрицу переходов
![]()
а также знать исходное состояние системы.