

4.2. Системы с автоматической коробкой
скоростей в главном приводе
В настоящее время практически отсутствуют системы ССР для станков с АКС в главном приводе, определённые попытки в этом отношении сделаны в [6,7], где анализируется возможность переключения АКС под нагрузкой. Однако какие-либо принципы построения и экспериментальные исследования таких систем отсутствуют. Решение комплексной задачи построения системы ССР с АКС намечено в работах [42, 56, 58, 70, 73], которые являются в этом направлении одними из первых.
Системы
ССР с АКС относятся к дискретным системам
и для них во многом справедлив ранее
проведённый анализ установившихся;
режимов работы, особенно при малых
возмущениях F
(см.
§3.2). Однако, в отличие от рассмотренных
ранее систем, в станках с АКС частота
вращения шпинделя ni
принимает
ряд фиксированных значений, обусловленных
ступенями m
АКС, смежные значения которых отличаются
на передаточное отношение, равное
знаменателю геометрического ряда
 ,
т.е.
,
т.е.
 (4.8)
(4.8)
где
 -
частота вращения шпинделя на нижней
ступени АКС.
-
частота вращения шпинделя на нижней
ступени АКС.
В
режиме ССР на основании (I.I)
 должно быть равно
должно быть равно
 (4.9)
(4.9)
Решая (4.8) относительно m с учетом (4.9), получим
 (4.10)
(4.10)
Где АК – конструктивная постоянная АКС.
 (4.11)
(4.11)
Поскольку m натуральное число, то из (4.10) следует, что ему соответствует фиксированные отрезки радиуса Rm – поддиапазоны радиуса обработки. При изменении V3 значение m корректируется в соответствии с (4.10) на натуральное число. Такой алгоритм работы системы в ряде случаев увеличивает дискретность настройки и стабилизации V, однако значительно упрощает процесс настройки на V3 и в целом всю техническую реализацию алгоритма. Графическая иллюстрация решения уравнения (4.10) для станка I6K20Ф3 с 9-ти ступенчатой АКС (m=9), в которой аk= 125, =1,4 при Rmax= 200мм приведена на рис. 4.3, где точки а,b,..,h,i обозначают моменты изменения значения m, т.е. моменты переключения АКС.
Функциональная схема цифровой системы ССР с АКС [42], работающей в соответствии с алгоритмом (4.10), изображена на рис. 4.4. В этой схеме код радиуса NR формируется на выходе блока определения радиуса обработки АЕ, подключённого к УЧПУ ACL1 и работающего так, как это было описано выше. Код NR поступает в арифметическое устройство ACL2, где сравнивается в
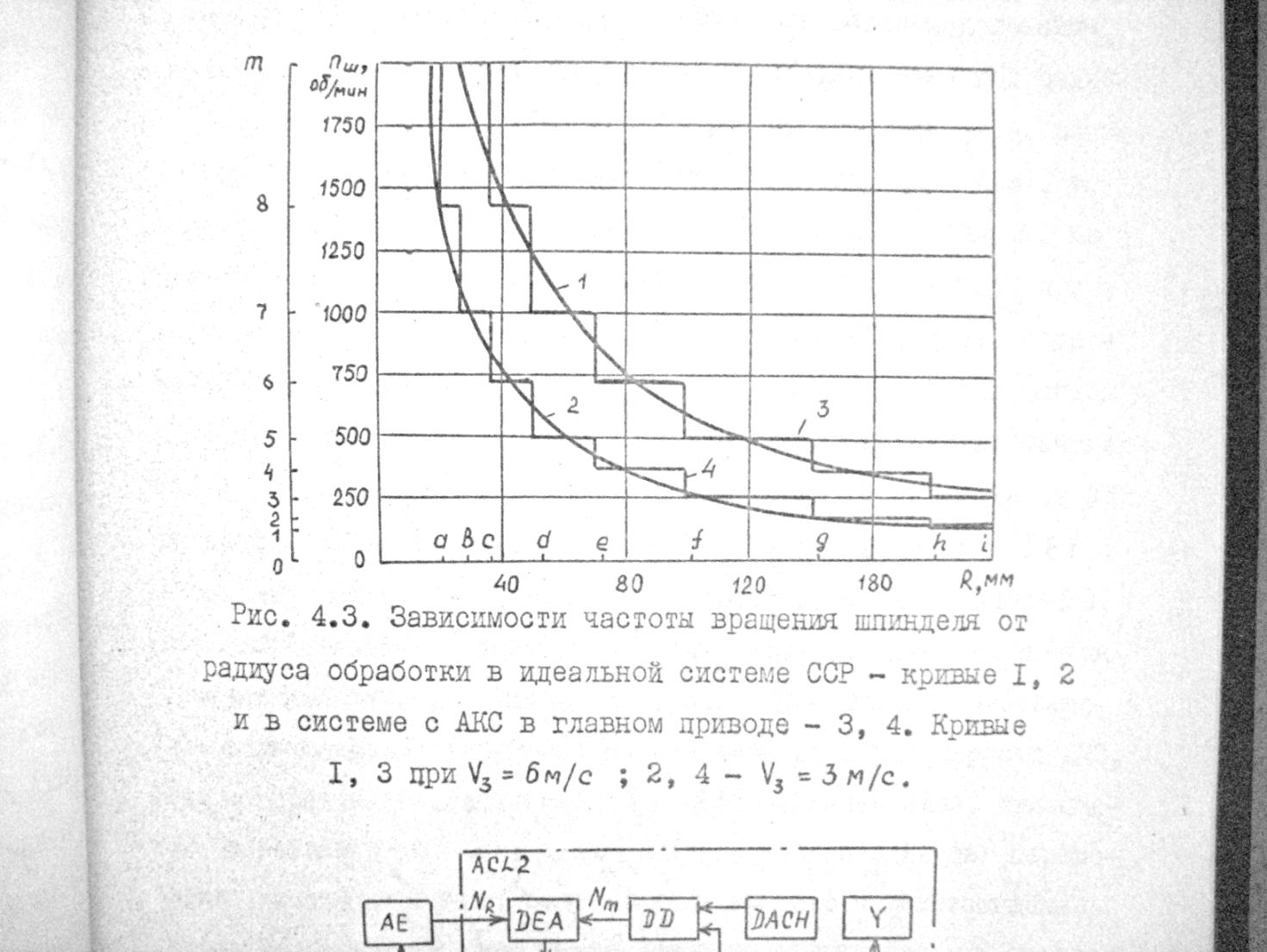
Рис.4.3. Зависимости частоты вращения шпинделя от радиуса обработки в идеальной системе ССР – кривые 1, 2 и в системе с АКС в главном приводе – 3,4. Кривые 1,3 при V3=6 м/с; V3=3 м/с.
Рис. 4.4.
устройстве DEА с кодами Nm границ поддиапазонов Rm, т.е. с кодами точек а,b,..,h,i (см. рис. 4.3), начиная с меньшего Rm (точки a). Коды Nm формируются в устройстве опорных кодов DACH и поступают на DEA через мультиплексор DD, переключением которого управляет счётчик DS1. Выходной код DS1 непрерывно изменяется от нуля до m+1, т.к. на его вход всё время поступают импульсы от УЧПУ ACL1. Если Nm<NR, то DEA . формирует сигнал, запрещающий работу элемента И DX, в противном случае формируется разрешающий сигнал. На другой вход DХ подаётся разрешающий сигнал от триггера DS3, установленного в это состояние в начале обработки кадра сигналом НК, прошедшим на него через элемент ИЛИ DW2. На третий вход элемента И DX поступают входные импульсы счётчика DS1. Таким образом, через DX пройдёт импульс, установивший счётчик DS1 в состояние, при котором впервые на DEA был подан код границы диапазона Rm (код точки а,b,..,h,i) больший, чем код радиуса обработки R, т.е. Nm>NR. Так, если R=30 мм, т.е. радиус обработки находится в диапазоне b-c (см. рис. 4.3), то импульс на выходе DX будет соответствовать коду точки b. По импульсу DX в регистр DS2 записывают код счетчика DS1, при которым в первые выполнилось неравенство Nm>NR. Затем задержанным на схеме задержки DT на время, необходимое для записи кода DS1 в DS2, импульсом элемента И DХ устанавливают триггер DS3 в запрещающее состояние, и последующие импульсы через DХ не проходят. После вызова на DEA кода точки i счётчик DS1 очередным импульсом переводится в состояние, закрывающее DD, при этом дешифратор вырабатывает импульс, который, пройдя элемент ИЛИ DW2, устанавливает триггер DS3 вновь в разрешающее состояние. На этом цикл определения ступени скорости АКС; код которой m записан в регистре DS2, заканчивается. Эти циклы, повторяясь до нескольких десятков раз за один шаг перемещения суппорта станка, обеспечивают высокую помехозащищённость системы, т.к. код m всё время подтверждается. С выхода регистра DS2 код m подаётся через сумматор DW1 на АКС У для переключения ступеней её скорости и осуществления режима ССР. С помощью сумматора DW1 код m может корректироваться в соответствии с зависимостью (4.10) при изменении V3, причём эта коррекция может осуществляться как по программе, так и вручную с пульта оператора.
Все узлы системы выполнены на цифровых микросхемах, а в качестве устройства DACH используются перемычки между источниками нулевого и единичного логических напряжений.
Устройство сравнения кодов DEA системы выполнено по комбинационной схеме [130]. Принципиальная схема DEА приведена на рис. 4.5. Его принцип действия хорошо понятен из рассмотрения, работы первого разряда устройства. Выходной сигнал. Н1 принимает единичное значение только при L1>G1, т.е.
 .
(4.12)
.
(4.12)
В общем случае для n – разрядных кодов Ln и Gn функция неравенства Hn имеет вид
 . (4.13)
. (4.13)
Максимальное время tср срабатывание DEA равно
 , (4.14)
, (4.14)
где
 –время
задержки одного логического элемента.
–время
задержки одного логического элемента.
В настоящее время в аппаратно-реализуемых УЧПУ наиболее распространены микросхемы 155 серии, имеющие tco = 18,5 нс [112] , при выполнении на которых DEA даже в случае n=16 , tср = 0,6 мкс, что является достаточным быстродействием.
Цифровая система ССР с АКС в главном приводе была изготовлена и внедрена в производство на Ульяновском авиационном промышленном комплексе имени Д.Ф. Устинова в комплекте с УЧПУ H22-IM и станком модели 16К20ФЗ с годовым экономическим эффектом более 12 тысяч рублей на единицу оборудования (см. приложение I). Её экспериментальные исследования и производственные испытания (см. приложение 3) показали, что система проста и надёжна в эксплуатации, обладает высокой помехозащитностыо, не требует дополнительного объёма программ и работает
Рис. 4.5.
полностью автоматически. При модернизации существующего оборудования требует минимального времени для его остановки, т. к. имеет небольшое количество стыковочных точек и позволяет провести основные операции по отладке системы без подключения её к действующему оборудованию. Необходимо также отметить, что изменение V в результате её дискретного регулирования, и в особенности в момент переключения АКС, вызывает незначительное локальное ухудшение качества обработки поверхности (см. приложение 3). Однако, в целом качество поверхности улучшается по сравнению с отсутствием режима ССР.
В
соответствии с алгоритмом (4.10) может
быть построена и цифро-аналоговая
система ССР [58], её функциональная схема
изображена на рис. 4.6. В этой системе код
радиуса обработки, поступающий с блока
АЕ
на арифметическое устройство ACL2
,
преобразуется с помощью ЦАП UZУ1
в напряжение, которое после логарифмирования
преобразователем ACV
подводится
к вычитающему входу суммирующего
устройства AW
На
суммирующие входа AW
в
соответствии с (4.10) прикладываются
напряжения, пропорциональные Ак
(4,11), от источника опорного напряжения
АСН
и
 от ЦАП UZУ2,
преобразующего в напряжение код задания
частоты вращения шпинделя, поступающий
от УЧПУ ACL1
и
использующийся в. качестве Vз.
При этом на выходе AW
формируется
напряжение, соответствующее ступеням
скорости АКС в режиме ССР, из которого
с помощью АЦП и UУZ
формируется код m,
управляющий переключением АКС У
.
от ЦАП UZУ2,
преобразующего в напряжение код задания
частоты вращения шпинделя, поступающий
от УЧПУ ACL1
и
использующийся в. качестве Vз.
При этом на выходе AW
формируется
напряжение, соответствующее ступеням
скорости АКС в режиме ССР, из которого
с помощью АЦП и UУZ
формируется код m,
управляющий переключением АКС У
.
Все узлы рассмотренной системы ССР имеют простую конструкцию и малый, аппаратурный состав, т.к. стабилизация скорости резания осуществляется с большой дискретностью, что не предъявляет высоких требований к точности работы отдельных узлов системы. При этом в системе могут быть использованы в качестве ЦАПов резистивные матрицы [79] , а функционального преобразователя ACV - конструктивно простой диодный преобразователь [104.]
Рис. 4.6.
Рассмотренные системы ССР с АКС в главном приводе имеют приблизительно равную техническую сложность, их работа полностью автоматизирована, поэтому конкретное применение каждой из них определяется унифицированностью блоков систем и УЧПУ. Однако при реализации режима ССР в универсальных токарных станках с АКС наиболее просто это выполнить с помощью цифро–аналоговой системы и потенциометрического датчика радиуса.