

3.3. Динамика систем с дискретным
измерением радиуса обработки
Динамические процессы в дискретных как и в непрерывных системах ССР обусловлены действием V3 , когда система движется до установившегося значения V при отсутствии возмущающего воздействия (F=0), появлением возмущающего воздействия (F=Const) в момент врезания при установившемся значении V, а также дискретизацией радиуса в процессе работы системы, т.е. изменением значения RN.
Найдём выражения, определяющие поведение координат дискретных систем ССР в динамических режимах. Подставив в (3.13) значения W1(p), W2(p), U0 из (1.28), (1.29), (1.54), запишем для АПР системы ССР следующее уравнение
 , (3.41)
, (3.41)
с учётом (1.40) это выражение примет вид
 , (3.42)
, (3.42)
Обозначив
на каждом уровне N
корни однородного уравнения,
соответствующего уравнению (3.42)
 ,
частное решение (3.42)
–B,
а
постоянные интегрирования – С1N
,
С2N
, C3N,
запишем решение (3.42) в виде
,
частное решение (3.42)
–B,
а
постоянные интегрирования – С1N
,
С2N
, C3N,
запишем решение (3.42) в виде
 ,
(3.43)
,
(3.43)
 .
(3.44)
.
(3.44)
Постоянные интегрирования определяются на каждом уровне N при t=0. В соответствии с методом припасовывания [53,137] начальными значениями уровня N, т.е. значения RN (0) и его производных, являются конечные значения уровня N-1 , найденные в момент времени tN , когда
RN-1(tN)=RN. Первая производная RNv(t) радиуса по времени и вторая –
RNU (t) равны
 (3.45)
(3.45)
 (3.46)
(3.46)
Постоянные интегрирования С1N , C2N , C3N находим из следующих уравнений

 (3.47)
(3.47)

где R(N-1)v – значение первой производной радиуса в конце (N-1) уровня дискретизации;
R(N-1)u– значение второй производной радиуса в конце (N-1) уровня дискретизации.
Откуда находим
 ,
(3.48)
,
(3.48)
 (3.49)
(3.49)
 . (3.50)
. (3.50)
Поскольку
по требованиям технологии обработка
изделии должна начинаться, когда шпиндель
вращается с заданной скоростью и все
процессы в системе установились, то в
начале уровня N=0
угловая скорость
 имеет
заданное значение, а RN=Rд.
При
этом в выражениях (3.47) – (3.50) необходимо
принять RN=Rд,
R(N-1)V=V3KR/Rд,
R(N-1)U=0.
имеет
заданное значение, а RN=Rд.
При
этом в выражениях (3.47) – (3.50) необходимо
принять RN=Rд,
R(N-1)V=V3KR/Rд,
R(N-1)U=0.
Угловая скорость wN (t) в данном случае на основании (1.40)
.  (3.51)
(3.51)
Исследование динамических процессов в АПР системе ССР можно упростить, допустив, что к моменту перехода на следующий уровень .дискретизации процессы в системе установились и уровень N процессы в системе установились и описываются выражениями (3.14), (3.15). При этом с учетом (1.40)
 (3.52)
(3.52)
.  (3.53)
(3.53)
Для ПДС и АППР систем ССР с учётом W1(p), W2(p), KД, описывающихся (1.28), (1.29), (1.71), на основании (3.26) получим
 (3.54)
(3.54)
На рис. 3.9, 3.10 показаны переходные функции по wN и VN в рассматриваемых системах ССР, значение параметров которых определяется (1.77).Здесь необходимо отметить, что в пусковом режиме, т.е. при N=0 переходные функции в ПДС и АППР системах могут быть улучшены и иметь максимальное перерегулирование не более 3 – 4 % за счёт снижения в этом режиме значения Крv, так как это делалось для непрерывных систем.
В том случае, когда F=0 или весьма близко к этому значению, например, при холостом ходе станка или обработке с малыми усилиями резания, выражение (З.42) принимает вид
 (3.59)
(3.59)
Откуда
при комплексно-сопряжённых корнях
характеристического уравнения
 получаем
получаем
 (3.60)
(3.60)
 (3.61)
(3.61)
 (3.63)
(3.63)
 (3.64)
(3.64)
Производные
радиуса по времени равны
 (3.64)
(3.64)
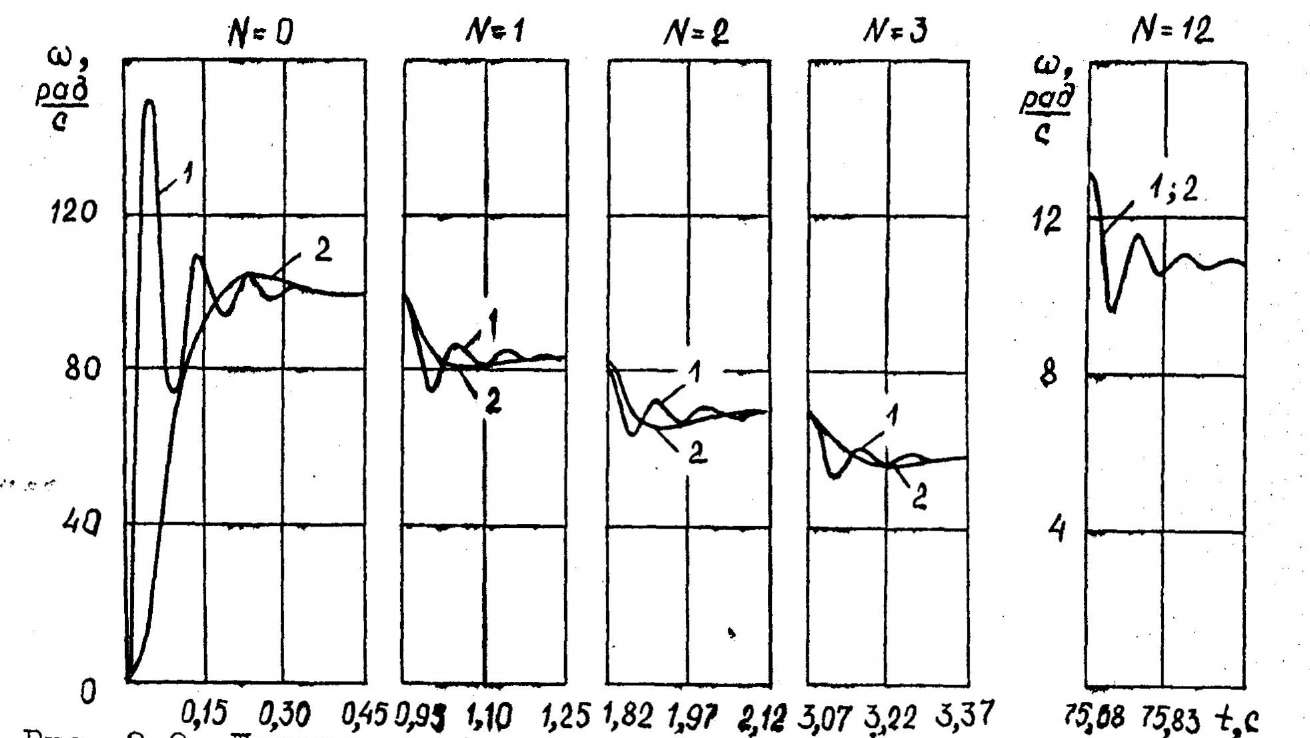
Pис. 3.9. Переходные функции систем ССР по угловой скорости шпинделя при V3 = 2 м/с, , Rд=20мм, KR=0,08мм/рад, F=100Н. Кривая 1 в ПДС и АППР системе при Крv=6; кривая 2 - в АПР системе при Kpv =22.
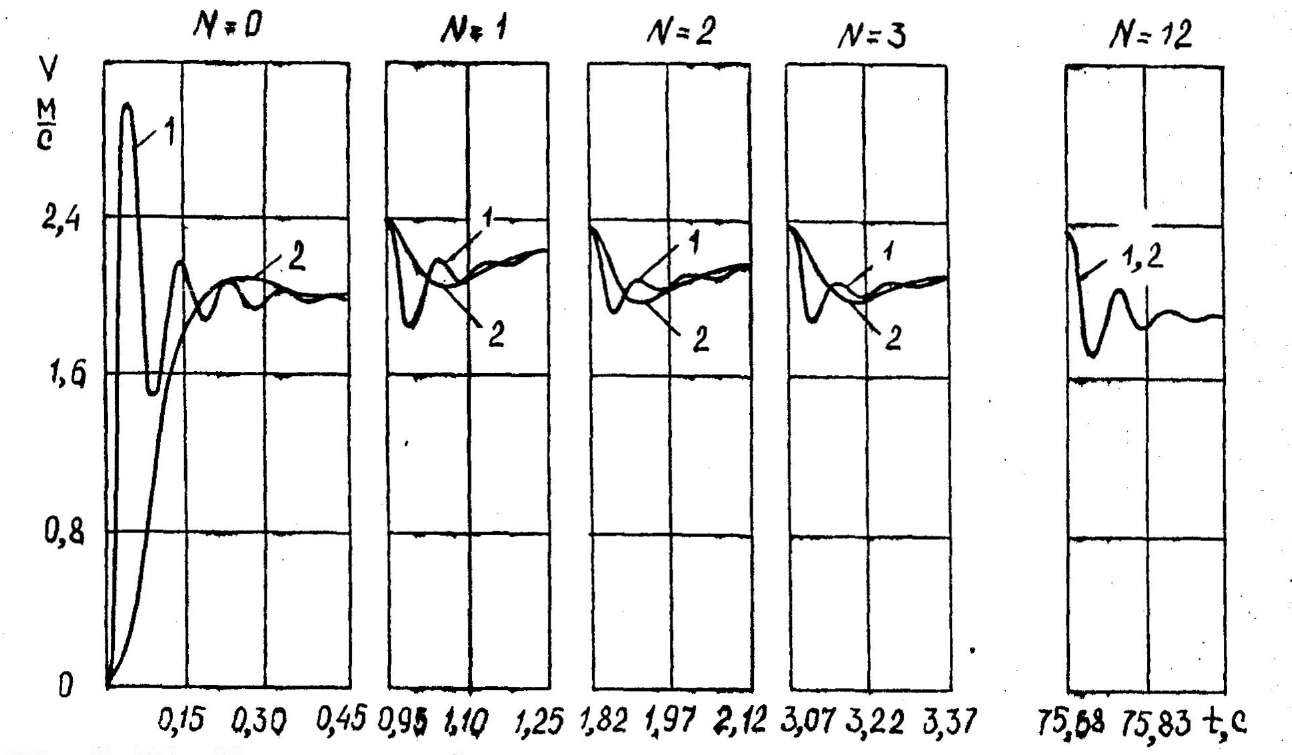
Рис.3.10. Переходные функции систем ССР по скорости резания при V3 = 2м/с, , Rд=20мм, KR=0,08мм/рад, F=100Н. Кривая I - в ПДС и АППР системе при Крv=6; кривая 2 - в АПР системе при Kpv=22.
 (3.65)
(3.65)
П остоянные
интегрирования C1N,
C2N
и
коэффициент BN
определяются из уравнений, аналогичных
(3.47), т.е.
остоянные
интегрирования C1N,
C2N
и
коэффициент BN
определяются из уравнений, аналогичных
(3.47), т.е.

 (3.66)
(3.66)

откуда получаем
 (3.67)
(3.67)
 (3.68)
(3.68)
 , (3.69)
, (3.69)
а угловая скорость wN(t) находится согласно (3.51).
Для этого случая (F=0) при выполнении (3.52), (3.53) на основании (3.67) и последнего уравнения (3.66), получим
 (3.70)
(3.70)
 (3.71)
(3.71)
Подставив в (3.60) полученные значения, преобразуем его к виду
 . (3.72)
. (3.72)
На основании (3.51), (3.72) запишем
 (3.73)
(3.73)
В ПДС и АППP системах ССР при F = 0 на основании (3.54) имеем
 (3.74)
(3.74)
Если
характеристическое уравнение,
соответствующее (3.74), имеет
комплексно-сопряжённые корни
 ,
то RN(t)
в ПДС и АППР системах ССР описывается
(3.60) с теми же значениями α,
AN,
BN,
C1N,
C2N,
но
при другом β,
котрое
не зависит от RN
и
равно
,
то RN(t)
в ПДС и АППР системах ССР описывается
(3.60) с теми же значениями α,
AN,
BN,
C1N,
C2N,
но
при другом β,
котрое
не зависит от RN
и
равно
 (3.75)
(3.75)
В случае выполнения (3.57), (3.58) для рассматриваемых систем имеем
 (3.76)
(3.76)
 (3.77)
(3.77)
Зависимость скорости резания VN(t) от времени находится в рассматриваемых случаях в соответствии с (3.35), принимая во внимание, что угловая скорость при этом является функцией времени и описывается (3.73), (3.73).
Анализ переходных функций систем ССР показывает, что при дискретном измерении R при прочих равных условиях лучшими динамическими характеристиками обладает АПР система, особенно при малых значениях N, с увеличением которого динамика системы ухудшается, приближаясь к динамике ПДС (АППР) системы, и становится равной ей при максимальных значениях N. Необходимо так же отметить, что в дискретных системах ССР зависимость динамических процессов от технологических параметров процесса резания имеет гораздо меньше значение, чем в непрерывных системах.