

3.2. Установившиеся режимы работы
В том случае, когда неравенство (3.12) не выполняется, необходимо учитывать дискретный характер измерения R и исследовать систему ССР как дискретную. При этом угловая скорость в АПР системе ССР (см. рис. 3.2) определяется следующим выражением
 (3.13)
(3.13)
Для установившегося режима работы с учётом выражений (1.28), (1.29), (1.54), описывающих W1(p),W2(p), U0 , из (3.13) найдём
 (3.14)
(3.14)
и скорость резания равна
 (3.15)
(3.15)
Продифференцировав (3.15) дважды поR, получим
 (3.16)
(3.16)
откуда видно, что V на уровне дискретизации N изменяется в общем случае экстремальным образом, имея максимум при значении радиуса Rэкс, которое определяется из (3.16) при равенстве этого выражения нулю, т.е.
 (3.17)
(3.17)
Опыт исследования систем ССР показывает, что Rэкс всегда больше максимального радиуса обработки, т.е. Rэкс >Rmax, при этом выполняется записанное на основании (3.16) следующее неравенство
 (3.18)
(3.18)
Здесь необходимо отметить, что характер процессов в исследуемых, системах ССР при переходе на более высокие и низкие уровни N остаётся одним и тем же. Поэтому в дальнейшем рассмотрение будем проводить, предполагая движение системы в сторону увеличения N.
Скорость резания в начале VNH и в конце уровня дискретизации N определяется тем, что R принимает в крайних точках уровня N значения RN и RN+1, отличающиеся на шаг дискретизации rN данного уровня
 (3.19)
(3.19)
 (3.20)
(3.20)
Угловая скорость шпинделя wNH и VNk в начале и конце уровня N находится делением VNH и VNK соответственно на RN и RN+1.
И з
выражений (3.19), (3.20) видно, что изменение
скорости резания на уровне дискретизации
обусловлено действием двух величин –
V3
стремится
увеличить
V
к концу уровня, a
F
уменьшить
её. При этом VN
может
быть как больше, гак и меньше
V3
.
В этом случае на изменение VN
в
зависимости от её ошибки стабилизации
необходимо
наложить следующие ограничения
з
выражений (3.19), (3.20) видно, что изменение
скорости резания на уровне дискретизации
обусловлено действием двух величин –
V3
стремится
увеличить
V
к концу уровня, a
F
уменьшить
её. При этом VN
может
быть как больше, гак и меньше
V3
.
В этом случае на изменение VN
в
зависимости от её ошибки стабилизации
необходимо
наложить следующие ограничения
 (3.21)
(3.21)
Система ССР работает при различных значениях F от нулевых до максимальных, поэтому при анализе неравенств (3.21) они должны быть усилены за счёт соответствующего выбора FиR.
Из (3.18) следует, что VNK >VNH , поэтому в первое неравенство (3.21) подставляем из (3.20) VNK и усиливаем его, пренебрегая членом, содержащим F, получаем
 (3.22)
(3.22)
Это неравенство определяет на каждом уровне N шаг rN , обеспечивающий стабилизацию V с ошибкой не ниже заданной.
В случае фиксированного шага r0 в (3.22) необходимо положить N=0, т.к. при этом, как это следует из (3.20), VNK максимально, отсюда можно записать
 (3.23)
(3.23)
Второе неравенство (3.21) анализируем с помощью (3.19), усиливая его подстановкой RNmax – значение радиуса обработки на последнем, максимальном уровне N, откуда найдём
 (3.24)
(3.24)
Подставив (3.24) в (3.18), определим условия, при которых выполняется (3.18), приняв в нём R=Rmax, запишем

Приняв во внимание (3.22) и то, что Rmax-rn ≤ RNmax ≤ Rmax, получим из последнего выражения
 (3.25)
(3.25)
Из
неравенства (3.25) следует, что для
выполнения (3.18) т.е. G≥1
необходимо
обеспечить

В АППР (ПДС) системе ССР (см. рис. 3.3, рис. 3.4) угловая скорость шпинделя на уровнях дискретизации равна
 (3.26)
(3.26)
Произведя математические выкладки, аналогичные сделанным выше, и, приняв во внимание, что KД определяется (1.71), найдём выражения, описывающие установившийся режим работы АППР и ПДС систем ССР
 (3.27)
(3.27)
 , (3.28)
, (3.28)
 , (3.29)
, (3.29)
 , (3.30)
, (3.30)
 , (3.31)
, (3.31)
 . (3.32)
. (3.32)
Учитывая справедливость для этого случая сделанных выше предположений и допущений, получим, что rN и r0 описываются выражениями (3.22), (3.23), а Крv определяется следующим неравенством
 (3.33)
(3.33)
Проверка в этом случае условия G >1 с учётом (3.33) даёт те же результаты, что и для АПР системы ССР, т.е G ≥1 при
На
рис. 3.7,
3.8
показаны зависимости VN
и
wN
от R
в рассматриваемых дискретных системах
ССР, в которых
 ,
Rд=20мм,
а Кpv
определяется в зависимости от V3
,
так чтобы обеспечить заданную
при переменном шаге дискретизации.
Анализ этих зависимостей показывает,
что
дискретизация R
с
переменным шагом позволяет значительно
сократить аппаратурный состав систем
при обеспечении заданной точности
стабилизации скорости резания. Причём
исследуемые системы обладают приблизительно
равными показателями качества в
установившемся режиме.
,
Rд=20мм,
а Кpv
определяется в зависимости от V3
,
так чтобы обеспечить заданную
при переменном шаге дискретизации.
Анализ этих зависимостей показывает,
что
дискретизация R
с
переменным шагом позволяет значительно
сократить аппаратурный состав систем
при обеспечении заданной точности
стабилизации скорости резания. Причём
исследуемые системы обладают приблизительно
равными показателями качества в
установившемся режиме.
Как видно из выражений (3.14), (3.15), (3.27), (3.28) при F=0 изменение координат в системах происходит одинаковым образом. Подставив значение wN, найденное для этого случая из (3.14) или (3.27) в (1.10), проинтегрировав и определив постоянную интегрирования, найдём зависимость радиуса RN на уровне дискретизации N от времени
 . (3.34)
. (3.34)
Поскольку при F=0 wn=V3/RN=const, то зависимость скорости резания VN(t) от времени определяется на основании основного соотношения режима ССР (1.1) и равна
Рис.
3.7.
Зависимости скорости резания от радиуса
обработки в дискретных системах ССР.
Кривая I при F=0;
2,
3 при F=
100 Н;
2–
в АПР
системе ССР;
3 - в АППР
и ПДС
системах ССР.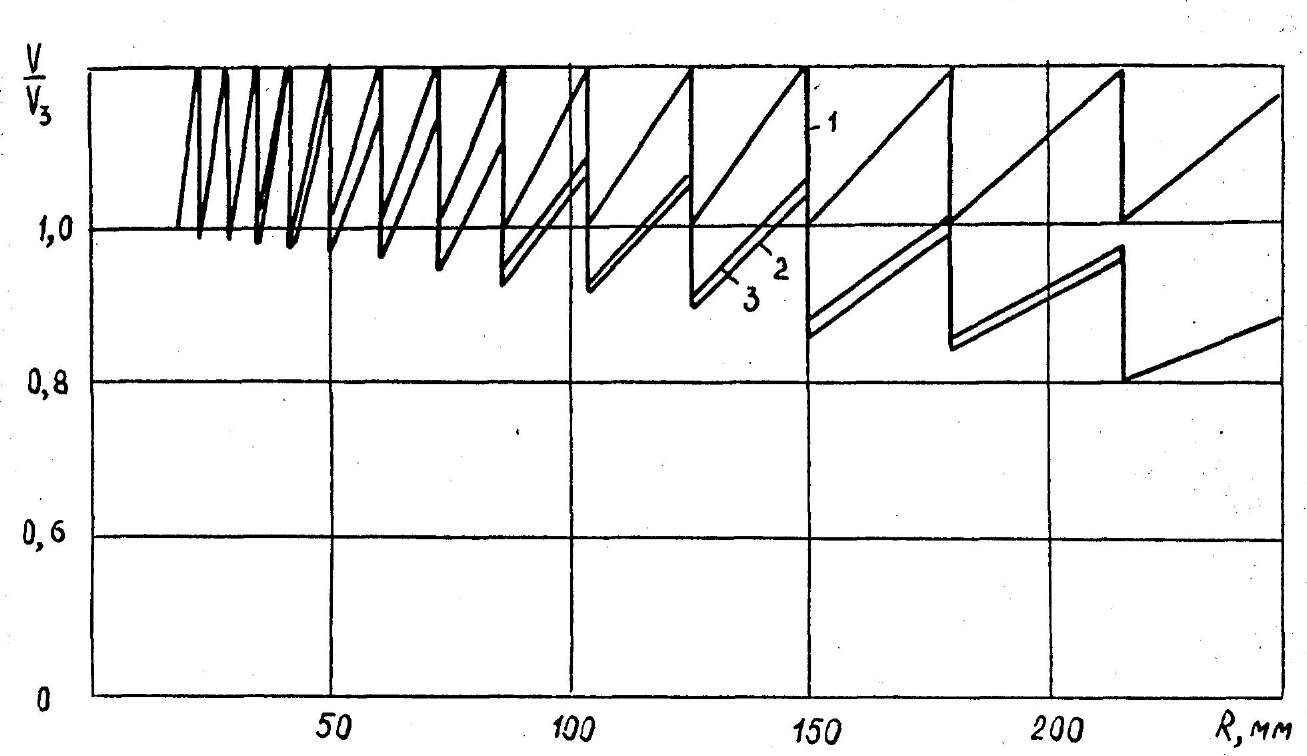
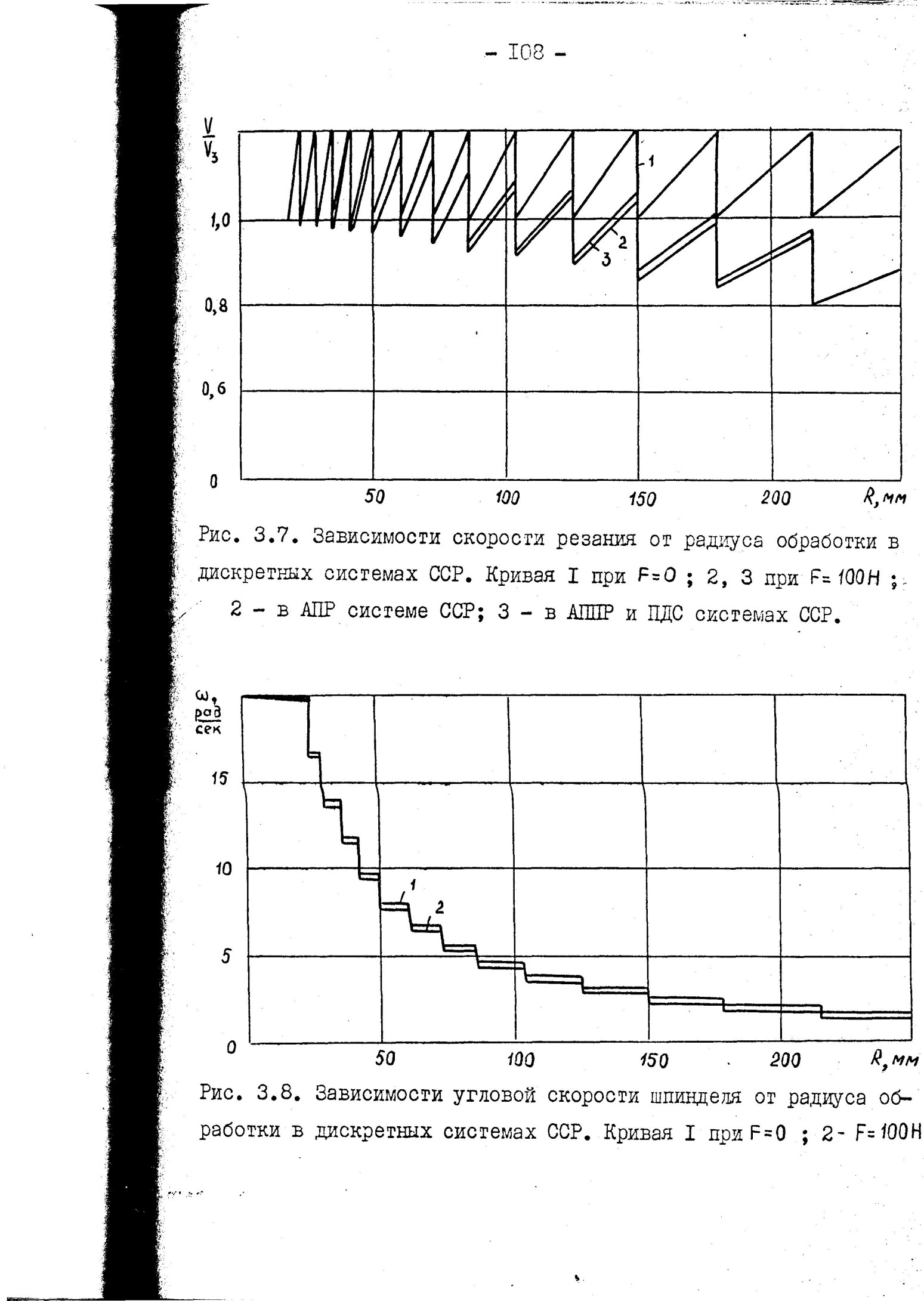
Рис. 3.8.Зависимости угловой скорости шпинделя от радиуса обработки в дискретных системах ССР. Кривая 1 при F=0; 2-F=100 Н
VN(t)=wN RN (t) (3.35)
В том случае, когда F≠0 , зависимость RN(t) в АПР системе ССР находится из (3.14) при подстановке в неё значения угловой скорости из (1.40), т.е., w=R'/KR откуда получим
 .
(3.36)
.
(3.36)
решение (3.36) запишем в виде
 (3.37)
(3.37)
Зависимость угловой скорости от времени на N уровне дискретизации определим из (3.37) на основании (1.40)
.  (3.38)
(3.38)
Для ПДС и АППР систем ССР зависимости радиуса и угловой скорости от времени на N уровне дискретизации имеют вид
 , (3.39)
, (3.39)
 . (3.40)
. (3.40)
Зависимость скорости резания от времени в этих системах при F≠0 находится в соответствии (3.35), приняв во внимание, что угловая скорость является в этом случае функцией времени и описывается выражениями (3.38), (3.40).