

86. У чому суть методів мережевого планування і управління?
Серед сучасних методів оптимізації і керування виробничими процесами значна роль належить мережевим методам. Широке коло задач математичного програмування можна подати в мережевому вигляді. Особливо це стосується транспортних задач, які мають цілком природну інтерпретацію як мережеві задачі, бо вони пов’язані з певною мережею транспортних маршрутів (доріг, залізничних, водяних шляхів, маршрутів повітряних трас, трубопроводів тощо). У цьому параграфі буде розглянуто кілька типових мережевих задач математичного програмування.
Назвемо
графом
будь-яку систему відрізків (прямолінійних
чи криволінійних), у певний с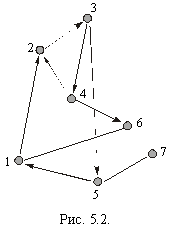 посіб
з’єднаних між собою (рис. 5.2).
посіб
з’єднаних між собою (рис. 5.2).
Названі
відрізки, якщо їм приписано напрям,
називаються дугами
графа;
надалі позначатимемо їх
![]() ,
наприклад:
,
наприклад:
![]() —
відрізок, що з’єднує точку 1 з точкою 2
(рис. 5.2).
—
відрізок, що з’єднує точку 1 з точкою 2
(рис. 5.2).
Точки, що є кінцями або початками дуг графів, в яких можуть з’єднуватись дві дуги або більше, називаються вершинами графа: кожна з вершин позначається певним номером (натуральним числом: 1, 2, 3, 4, ...), наприклад, точки 1, 2, 3, — вершини (рис. 5.2).
Отже,
кожній дузі відповідає впорядкована
пара вершин
![]() ,
де перший індекс і
означає початок дуги (вхід), другий
індекс j
— кінець дуги (вихід); тим самим задано
орієнтацію (напрям) дуги, що геометрично
зображається стрілкою в напрямі від
початку до кінця дуги.
,
де перший індекс і
означає початок дуги (вхід), другий
індекс j
— кінець дуги (вихід); тим самим задано
орієнтацію (напрям) дуги, що геометрично
зображається стрілкою в напрямі від
початку до кінця дуги.
Дуги
![]() та
та
![]() називаються
симетричними, або взаємними,
наприклад: (2, 4) і (4, 2).
називаються
симетричними, або взаємними,
наприклад: (2, 4) і (4, 2).
Ребром
(або ланкою)
графа називається ненапрямлений
відрізок, що зображає дугу. Позначимо
ребра символами
![]() ,
наприклад [5, 7] — ребро; тоді як для
відповідних дуг ця рівність не
справджується:
,
наприклад [5, 7] — ребро; тоді як для
відповідних дуг ця рівність не
справджується:
![]() .
.
Мережею (або сіттю) називається граф, елементам якого (дугам, вершинам, деяким їх сукупностям) поставлені у відповідність деякі параметри, що визначають їх властивості.
Такими параметрами можуть бути, наприклад, пропускні здатності шляхів, величини запасів чи потреб у певних пунктах — вершинах графа тощо.
Шляхом
у графі називається послідовність дуг
![]() ,
кінець кожної з яких збігається з
початком наступної, крім останньої (або
початок кожної з яких збігається з
кінцем попередньої, крім першої), тобто
,
кінець кожної з яких збігається з
початком наступної, крім останньої (або
початок кожної з яких збігається з
кінцем попередньої, крім першої), тобто
![]()
![]()
![]() ...,
...,
![]() .
.
Шлях
зручно позначати послідовністю вершин,
через які він проходить, тобто
![]() .
Прикладом шляху є послідовність таких
дуг (1, 2), (2, 3), (3, 5) або (1,2, 3, 5).
.
Прикладом шляху є послідовність таких
дуг (1, 2), (2, 3), (3, 5) або (1,2, 3, 5).
Контуром називається шлях, початкова вершина якого збігається з кінцевою, наприклад (1, 2), (2, 3), (3, 5), (5, 1) = (1, 2, 3, 5, 1).
87. Принцип оптимальності
З
викладених у попередніх параграфах
міркувань можна висновувати, що для
прийняття
оптимального рішення
на k-му
кроці багатокрокового процесу потрібна
оптимальність рішень на всіх його
попередніх кроках, а сукупність усіх
рішень дає оптимальний розв’язок задачі
лише в тому разі, коли на кожному кроці
приймається оптимальне рішення, що
залежить від параметра етапу
![]() ,
визначеного на попередньому кроці.
,
визначеного на попередньому кроці.
Цей факт є основою методу динамічного програмування і є сутністю так званого принципу оптимальності Р. Белмана, який формулюється так:
Оптимальний
розв’язок багатокрокової задачі
![]() має
ту властивість, що яким би не був стан
системи
має
ту властивість, що яким би не був стан
системи
![]() в
результаті деякої кількості кроків,
необхідно вибирати управління
в
результаті деякої кількості кроків,
необхідно вибирати управління
![]() на
найближчому кроці так, щоб воно разом
з оптимальним управлінням на всіх
наступних кроках приводило до максимального
виграшу на всіх останніх кроках, включаючи
даний.
на
найближчому кроці так, щоб воно разом
з оптимальним управлінням на всіх
наступних кроках приводило до максимального
виграшу на всіх останніх кроках, включаючи
даний.
Доведемо
справедливість такого твердження,
міркуючи від супротивного. Нехай маємо
задачу на максимізацію функції
![]() і
вектор
є
її оптимальним планом (стратегією,
поведінкою) n-крокового
процесу (n-вимірної
задачі) з початковим параметром стану
b.
і
вектор
є
її оптимальним планом (стратегією,
поведінкою) n-крокового
процесу (n-вимірної
задачі) з початковим параметром стану
b.
Принцип
оптимальності еквівалентний твердженню,
що вектор
![]() повинен
бути оптимальним планом
повинен
бути оптимальним планом
![]() -крокового
процесу
-вимірної
задачі з початковим параметром стану
-крокового
процесу
-вимірної
задачі з початковим параметром стану
![]() ,
що дорівнює
,
що дорівнює
![]() .
Припустимо протилежне, тобто що вектор
не
є оптимальним планом відповідного
процесу, а ним є якийсь інший план
.
Припустимо протилежне, тобто що вектор
не
є оптимальним планом відповідного
процесу, а ним є якийсь інший план
![]() .
Тоді дістанемо:
.
Тоді дістанемо:
![]() ,
,
але
![]()
![]() ,
,
що суперечливо. Отже, принцип оптимальності доведено.