

3 Нелинейное программирование
3.1 Построение одзп, выбор начальной точки поиска
Целевая функция имеет вид:

Построим ОДЗП:
Рисунок 3.1 - ОДЗП
Внутри области допустимых значений выбираем точку x0, которая в дальнейшем будет являться начальной в процессе поиска экстремума:
x0=(3;1).
3.2 Нахождение экстремального значения функции f(X) без учета ограничений на переменные
3.2.1 Метод наискорейшего спуска
В методе наискорейшего спуска (подъема) очередная точка при поиске максимума функции вычисляется по формуле:
 (3.1)
(3.1)
где “+” для задачи на максимум, а “-” – на минимум.
Найдем
градиент
 :
:
 ;
(3.2)
;
(3.2)
 .
.
На
первом шаге движение осуществляется
из точки
 в направлении, обратном вектору
в направлении, обратном вектору
 в новую точку
в новую точку
 :
:

Величина шага
 на любом шаге выбирается из условия
обеспечения экстремума функции в
рассматриваемом направлении. Подставляя
координаты точки
в функцию
,
получим:
на любом шаге выбирается из условия
обеспечения экстремума функции в
рассматриваемом направлении. Подставляя
координаты точки
в функцию
,
получим:

 ;
;
Из условия:
 ;
;
найдем
 :
:
 ;
;
 ;
;
 ;
;
В результате после первого шага координаты очередной точки получаются равными:

Вычисляем
 :
:
 .
.
На втором шаге движение осуществляется
в направлении, обратном вектору
с увеличением шага
 :
:

 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
В результате после второго шага координаты очередной точки получаются равными:

Вычисляем
 :
:
 .
.
На третьем шаге движение осуществляется
в направлении, обратном вектору
с увеличением шага
 :
:


 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
В результате после третьего шага координаты очередной точки получаются равными:

Вычисляем
 :
:
 .
.
На третей итерации закончим
вычисления, значение функции цели:

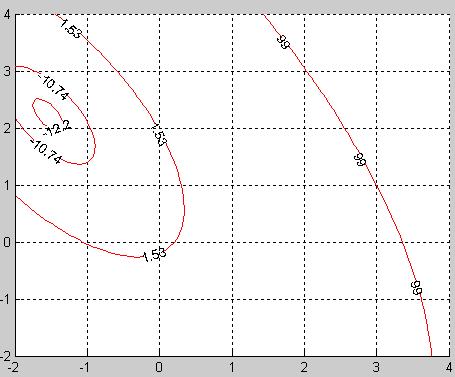
Рисунок 3.2 – Графическая интерпретация метода наискорейшего спуска
3.2.2 Метод Ньютона-Рафсона
Данный метод дает решение задачи за 1 шаг. Очередная точка поиска вычисляется в соответствии с выражением:
 (3.3)
(3.3)
где
 – матрица Гессе функции
– матрица Гессе функции
 ;
;
 – обратная по отношению к
матрица.
– обратная по отношению к
матрица.
Градиент F(x):
 ;
;
 .
.
 (3.4)
(3.4)

где det H – определитель матрицы H; AdjH – присоединенная к H матрица (транспонированная матрица алгебраических дополнений).
Найдем определитель матрицы Гессе:

Найдем транспонированную матрицу алгебраических дополнений AdjH:

Теперь найдем матрицу обратную по
отношению к
 - матрицу
- матрицу
 :
:
тогда:


Следовательно,
в точке
 функция
F(x)
достигает максимального значения.
функция
F(x)
достигает максимального значения.
3.3 Нахождение экстремального значения функции f(X) с учетом системы ограничений задачи
23.3.1 Метод допустимых направлений Зойтендейка
Координаты следующей точки:

 .
.
Тогда координаты очередной точки:
Определяем интервал допустимых значений для 0, при котором точка x1 будет принадлежать ОДЗП. Для этого подставим координаты точки x1 в ограничения задачи:
 =>
=> 
Тогда:

Находим величину ,которая обеспечит минимум функции F(x). Воспользуемся уже найденным =0,199 (метод наискорейшего спуска, стр. 29), но т.к. оно не входит в найденный интервал, то =0,0454. Координаты точки и значение градиента функции в этой точке :

На следующем шаге двигаемся в направлении
 и
попадаем в очередную точку.
и
попадаем в очередную точку.
Координаты очередной точки:

Определяем интервал допустимых значений для 1, при котором точка x2 будет принадлежать ОДЗП. Для этого подставим координаты точки x2 в ограничения задачи:


Находим величину ,которая обеспечит минимум функции F(x) из условия



Полученное
значение
не входит в найденный ранее интервал,
поэтому примем
 .
Тогда:
.
Тогда:


Движение вдоль выводит за вершины ОДЗП, следовательно следующую точку ищем в соответствии с выражением:
 (3.5)
(3.5)
где
 - новое направление, которое составляет
минимальный острый угол с вектором
градиента и направлено либо внутрь,
либо по границе ОДЗП. При этом очередная
точка должна принадлежать ОДЗП.
- новое направление, которое составляет
минимальный острый угол с вектором
градиента и направлено либо внутрь,
либо по границе ОДЗП. При этом очередная
точка должна принадлежать ОДЗП.
Найдем направление
 очередного шага: т.к. x2
и точка экстремума лежат на оси [0;X2],
то
очередного шага: т.к. x2
и точка экстремума лежат на оси [0;X2],
то

При движении из точки x2 в точку x3 следует двигаться по граничной прямой в направлении , как показано на рис. 3.3.
Координаты точки x3 определяются выражением:

или

Находим
интервал изменения
,
при котором
 принадлежит ОДЗП:
принадлежит ОДЗП:


Найдем такое 2, которое обеспечит минимум F(x) в направлении


тогда

Вычисляются составляющие вектора градиента в точке x3:

Направление вектора
перпендикулярно направлению
,
следовательно, найденная точка
 обеспечивает минимум функции F(x)
с учетом ограничений на переменные:
обеспечивает минимум функции F(x)
с учетом ограничений на переменные:

Рисунок 3.3 - Графическая интерпретация метода допустимых направлений Зойтендейка