

1.5 Уравнение состояния в канонической форме,
схема моделирования
Запишем
уравнения состояния в канонической
форме. Чтобы перейти к канонической
форме, введем новую переменную q,
которая связана с переменной состояния
x
следующим образом:
 .
.
М – модальная матрица, которая имеет вид:
где
 -
характеристические числа матрицы
Фробениуса А. Модальная матрица имеет
такой вид, так как матрица А имеет форму
Фробениуса и все корни характеристического
уравнения различны.
-
характеристические числа матрицы
Фробениуса А. Модальная матрица имеет
такой вид, так как матрица А имеет форму
Фробениуса и все корни характеристического
уравнения различны.
При подстановке q вместо х в нормальную форму уравнений состояния (1.3) получим уравнения состояния системы в канонической форме:
 (1.4)
(1.4)
Здесь
 -
диагональная матрица:
-
диагональная матрица:

где
 - матрица, обратная модальной,
определяемая выражением:
- матрица, обратная модальной,
определяемая выражением:
 .
.
Здесь
 -матрица,
присоединенная к М, т.е. транспонированная
матрица алгебраических дополнений.
-матрица,
присоединенная к М, т.е. транспонированная
матрица алгебраических дополнений.
тогда


Подставим найденные значения в (1.4), получим:



Схема
модели, соответствующая полученной
системе, приведена на рис.1.3. Для нее
характерно параллельное соединение
интеграторов, выходы которых определяются
переменными состояния
 .
.

∫


5
∫
U



-577,5
∫




74
Рисунок 1.3 – Схема модели, соответствующая уравнениям состояния в канонической форме
Получим уравнения состояния в нормальной форме, с помощью Matlab.
ss(W) – команда, выводящая матрицы A, B, C, D
Получим:


u

Рисунок 1.4 – Схема модели, соответствующая уравнениям состояния в нормальной форме
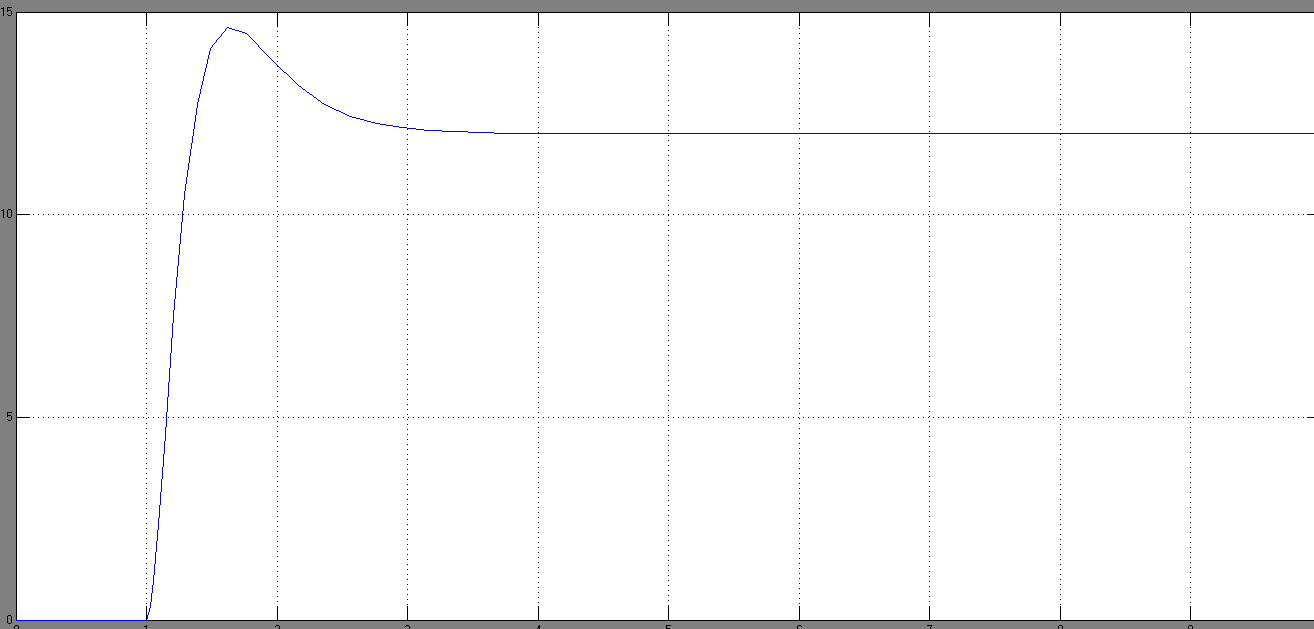
Рисунок 1.5 – Переходная характеристика
1.6 Решение уравнения состояния в нормальной и канонической формах
Найдем
решение y(t)
для системы уравнений в нормальной
форме, если начальные условия имеют вид
y(0)=1,5;
 .
Сигнал u(t)=15∙1(t).
переходя к начальным условиям для х, в
соответствии с принятыми ранее
обозначениями, получим:
.
Сигнал u(t)=15∙1(t).
переходя к начальным условиям для х, в
соответствии с принятыми ранее
обозначениями, получим:

Решение
уравнения состояния
 складывается из двух составляющих
x(t)=x1(t)+
x2(t)
– свободной и вынужденной.
складывается из двух составляющих
x(t)=x1(t)+
x2(t)
– свободной и вынужденной.
Свободная составляющая – это общее решение дифференциального уравнения системы с нулевой правой частью. Оно не зависит от внешнего воздействия и характеризует естественное поведения системы.
Вынужденная составляющая – это частное решение дифференциального уравнения с ненулевой правой частью. Оно зависит от сигнала u(t) и характеризует поведения системы под его воздействием.
Решение уравнения состояния имеет вид:

где еAt – фундаментальная матрица или матрица перехода.
Она вычисляется по следующей формуле:
еAt= γ0E+ γ1A+ γ2A2,
где γ0, γ1, γ2 – неизвестные коэффициенты.
Вычислить их можно, решая матричное уравнение:
Для рассматриваемого примера:
Перемножая матрицы, получаем систему уравнений следующего вида:
 γ0
-3 γ1+9γ2=
е-3t,
γ0
-3 γ1+9γ2=
е-3t,
γ0 -5γ1+25γ2= е-5t,
γ0 -7γ1+49γ2= е-7t.
Решение данной системы уравнений имеет вид:
 γ0=4,375e-3
t – 5,25e-5
t+1,875e-7
t,
γ0=4,375e-3
t – 5,25e-5
t+1,875e-7
t,
γ1=1,5e-3 t - 2,5 e-5 t+e-7 t,
γ2=0,125e-3 t-0,25e-5 t+0,125e-7 t.
 =>
=>
Итак,





Определим вынужденную составляющую при входном сигнале u(t)=15∙1(t). Сигнал на выходе при поступлении на вход 1(t) уже вычислен – это переходная характеристика системы (1.1). Чтобы получить вынужденную составляющую сигнала в нашем случае, умножим переходную характеристику на 15.
Таким образом, сигнал на выходе системы будет следующим:
y(t)=6,5625e-3t –7,875e-5 t+2,8125e-7t+15(52,5e-3t – 147e-5 t+82,5e-7t+12)=
=794,0625e-3t – 2212,875e-5 t+1240,3125e-7t +180.
Выполним проверку:
y(0)=794,0625-2212,875+1240,3125+180=1,5 - верно;
y(∞)=180 - верно.
Найдем
решение уравнений состояния, представленных
в канонической форме (1.4). Каждое из
дифференциальных уравнений первого
порядка
 зависит только от одной переменной, и
его решение в общем виду имеет вид:
зависит только от одной переменной, и
его решение в общем виду имеет вид:
Определим начальные условия q(0) для вектора q(t).
Так
как
 ,
то
,
то

Найдем выражения
для
 ,
,
 и
и
 :
:



В результате получим:

Выполним проверку:
y(0)=794,0625-2212,875+1240,3125+180=1,5 - верно;
y(∞)=180 - верно.
Решения нормальных и канонических уравнений состояния совпадают.
1.7 Проверка: одинаково ли значение коэффициента усиления по передаточной функции, переходной характеристике, моделям в пространстве состояний, аналитической записи импульсной переходной характеристики
Проверим значение коэффициента усиления по:
передаточной функции:

переходной характеристике:
 ;
;
моделям в пространстве состояний (в установившемся режиме на входах интеграторов нули и u=1):
- каноническая форма:
-52,5 + 147 – 82,5=12
- нормальная форма:
x2=0, x3=-840, x1=12; y=x1=K=12.
аналитической записи импульсной переходной характеристики:
 ;
;
проверяем:
 .
.
Мы видим, что значение коэффициента усиления одинаково.