

8.Системы n линейных уравнений с n неизвестными. Метод обратной матрицы.
Пусть число ур-ний системы (2.3) равно числу переменных, т.е. m=n. Тогда м-ца явл. Квадратной, а её определитель называется определителем системы.
Рассмотрим
линейную систему (2.3):
 и
введем следующие обозначения:
и
введем следующие обозначения:
 -
матрица системы,
-
матрица системы,
 -
столбец неизвестных,
-
столбец неизвестных,
 -
столбец свободных членов. Тогда систему
(2.3) можно записать в виде матричного
уравнения:
-
столбец свободных членов. Тогда систему
(2.3) можно записать в виде матричного
уравнения:
АХ = В.
9.Системы линейных уравнений с n неизвестными.Формулы Крамера.
Введем
следующие обозначения. Пусть
![]() ,
,
![]() --
определитель матрицы, полученной из
матрицы
--
определитель матрицы, полученной из
матрицы
![]() заменой
столбца с номером
заменой
столбца с номером
![]() на
столбец
на
столбец
![]() свободных
членов,
свободных
членов,
![]() :
:
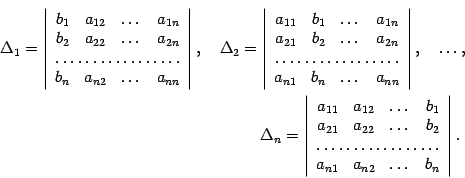
Теорема (правило Крамера). Если определитель системы Д <>0, то рассматриваемая система имеет одно и только одно решение, причём это решение находится по формулам:
 ,где
∆i
находится заменой в определителе i-ого
столбца на столбец свободных членов.
,где
∆i
находится заменой в определителе i-ого
столбца на столбец свободных членов.
![]()
Доказательство. Итак, рассмотрим систему 3-х уравнений с тремя неизвестными. Умножим 1-ое уравнение системы на алгебраическое дополнение A11 элемента a11, 2-ое уравнение - на A21 и 3-е - на A31:
Пусть
матрица А – невырожденная, тогда
существует обратная к ней матрица
![]()
Умножим обе части равенства (3.1) слева на Получим
![]()
Но
![]() тогда
тогда
![]() ,
а поскольку
,
а поскольку
![]() (3.2)
(3.2)
Итак, решением матричного уравнения (3.1) является произведение матрицы, обратной к А, на столбец свободных членов системы (2.3).
Формулы Крамера являются решением с-мы поэлементно.
Обратная матрица находится по формуле
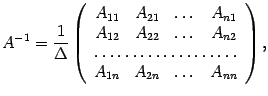
где
![]() --
алгебраические дополнения. Тогда
из (15.3)
следует, что
--
алгебраические дополнения. Тогда
из (15.3)
следует, что
 Заметим,
что по формуле (14.13)
разложение определителя
Заметим,
что по формуле (14.13)
разложение определителя
![]() по
первому столбцу в точности совпадает
с первым элементом матрицы-столбца в
правой части последнего равенства,
разложение определителя
по
первому столбцу в точности совпадает
с первым элементом матрицы-столбца в
правой части последнего равенства,
разложение определителя
![]() по
второму столбцу дает второй элемент
матрицы-столбца и т.д. Поэтому
по
второму столбцу дает второй элемент
матрицы-столбца и т.д. Поэтому
![]() ,
откуда и следует утверждение теоремы.
,
откуда и следует утверждение теоремы.
10.Метод Гаусса решения системы m линейных уравнений с n неизвестными.
Метод Гаусса – метод последовательного исключения переменных – заключается в том, что с помощью элементарных преобразований система уравнений приводится к равносильной системе ступенчатого или треугольного вида, из которых последовательно, начиная с последних по номеру переменных, находятся все остальные переменные.
решения системы m линейных уравнений с n неизвестными. Если строки расширенной м-цы линейно независимы, то ранг м-цы равен числу её уравнений, т.е. r=m, если – линейно независимы, то r<m
Пример2 . Исследовать совместность и найти общее решение системы
Решение. Произведем элементарные преобразования расширенной матрицы системы
Умножив первую строку матрицы на –3, сложим ее со второй и третьей строками, а, умножив на –2, сложим ее с четвертой строкой.
Тогда имеем
Сложим теперь вторую строку этой матрицы с третьей и вычтем ее из четвертой:
 Так
как расширенная матрица системы
Так
как расширенная матрица системы
![]() и
матрица системы А
содержат три ненулевых строки, то
и
матрица системы А
содержат три ненулевых строки, то
![]() Система
совместна и, так как ранг матрицы
Система
совместна и, так как ранг матрицы
![]() меньше
числа неизвестных системы, то система
имеет множество решений.
меньше
числа неизвестных системы, то система
имеет множество решений.
Выберем в качестве базисного минора
![]() Тогда
неизвестные х2,
х3,
х4
– базисные, а х1
и х5
– свободные. Укороченная система имеет
вид
Тогда
неизвестные х2,
х3,
х4
– базисные, а х1
и х5
– свободные. Укороченная система имеет
вид
Положим х1=с1, х5=с2. Тогда система примет вид
Так как х4=0, то из второго уравнения этой системы х3=3-4с2.
Подставляя х4 и х3 в первое уравнение, получим
Следовательно, общее решение исходной системы имеет вид
.Исследование систем линейных уравнений. Теорема Кронекера-Капелли.
Всякий детерминант минора матрицы A, отличный от нуля, размер которого равен рангу этой матрицы, называется базисным минором. Т.е. иными словами ранг матрицы A это наивысший отличный от нуля минор.
1°. Линейная зависимость строк матрицы.
Пусть P — поле.
Def1 Будем говорить, что строка B=(b1, …, bn) bi Є P является линейной комбинацией строк A1=(a11, …, a1n,), …, Ak=(k1, …, akn,), aij Є P, если для некоторых α1,…, αk Є P справедливо
bj=α1aij + … + αkj, j=1, …, n. (1)
Это равенство удобно записать в матричном виде:
B=α1A1+ … + αkAk. (1’)
Def2 Строки A1=(a11, …, a1n,), …, Ak=(k1, …, akn,) назовем линейно зависимыми, если такие одновременно не равные нулю, такие что из В=О НЕ СЛЕДУЕТ равенство всех коэффицентов нулю(т.е.αi может быть отличен от нуля)
Строки, не являющиеся линейно зависимыми, являются линейно независимыми. Иными словами, A1, …, Ak — линейно независимы, если равенство возможно, лишь когда все коэф. равны нулю.
Минор r-го порядка, отличный от нуля, называется базисным минором, строки и столбцы, на пересечении которых находится базисный минор, называются базисными строками и базисными столбцами.
Теорема (теорема о базисном миноре): Базисные строки (столбцы) линейно независимы. Любая строка (любой столбец) матрицы A является линейной комбинацией базисных строк (базисных столбцов).
Док-во (Рассуждение для строк):
Покажем, что базисные строки линейно независимы
Если первая, например, строка — линейная комбинация остальных, то вычитая в базисном миноре из первой строки линейную комбинацию остальных, получим нулевую строку базисный минор нулевой — противоречие.
Докажем, что строка A является линейной комбинацией остальных. Т.к. при переменах строк и столбцов определитель сохраняет свойство равенства (неравенства) нулю, то будем считать, что базисный минор составлен из первых r строк и r столбцов.
Рассмотрим определитель (r+1) порядка
Здесь Если то две одинаковые строки или столбца и определитель равны нулю. то это минор порядка r+1 равен нулю. Итак определитель равен нулю k и j.
Разложим его по r+1 столбцу. Отметим, что
и коэффициенты Aij не зависят от выбора j, т.е.
что означает, что k-ая строка является линейной комбинацией первых r.
Теорема Кронекера-Капелли
Система линейных уравнений совместна тогда и только тогда, когда ранг м-цы системы равен рангу расширенной м-цы этой системы.
Не приводя строгого доказательства теоремы, поясним его. В процессе преобразования системы уравнений (2.1) к виду (2.10), т.е. элементарных преобразований м-цы системы А и расширенной м-цы А1, ранги этих м-ц не изменяются. В случае, когда система совместна, ранг м-цы и ранг расширенной м-цы системы (2.10), так же как и данной системы (2.1) совпадают.
Для совместных систем линейных уравнений верны следующие теоремы:
Если ранг м-цы совместной системы равен числу переменных, т.е. r=n, то система (2.1) имеет единственное решение.
Если ранг м-цы совместной системы меньше числа переменных, т.е. r<n, то система (2.1) неопределённая и имеет бесконечное множество решений.
Замечание. Отличный от нуля минор порядка r, где r<n, будем называть базисным минором. Неизвестные х1, х2, …, хr так же называют базисными, остальные – свободными. Систему (1.16) называют укороченной.
Если свободные неизвестные обозначить хr+1=c1, хr+2=c2, …, хn=cn-r, то базисные неизвестные будут от них зависеть, то есть решение системы m уравнений с n неизвестными будет иметь вид
X = (x1(c1, …, cn-r), x2(c1, …, cn-r), …, xr(c1, …, cn-r), c1, c2, …, cn-r)T, где значок Т означает транспонирование.
Такое решение системы называется общим.