

Крепление двигателей. Схемы крепления. Действующие нагрузки. Расчет на прочность
Крепление двигателей.
Выбор конструкции крепления двигателей зависит от типа двигателя, его компоновки на летательном аппарате, а также от величины и направления приложенных сил. К креплению двигателей предъявляются следующие основные требования:
оно должно воспринимать все нагрузки, возникающие в различных условиях полета;
быть прочным и жестким при минимальном весе;
поглощать вибрации двигателя и воздушного винта с тем, чтобы они не передавались на конструкцию летательного аппарата;
компенсировать температурные перемещения корпуса двигателя;
обеспечивать быстрый монтаж и демонтаж.
В настоящее время все больше применяются на летательных аппаратах быстросъемные силовые установки. Такое крепление позволяет производить монтаж и демонтаж двигателя со всеми агрегатами и деталями, установленными на нем. При этом заранее смонтированный двигатель может быть предварительно опробован.
Крепление двигателя должно быть выполнено так, чтобы корпус его не входил в силовую схему летательного аппарата. Оно должно обеспечивать взаимозаменяемость двигателей, легкий и свободный доступ ко всем агрегатам, требующим периодического осмотра и регулировки во время эксплуатации. Удобству обслуживания всегда уделялось большое внимание, но сейчас простота обслуживания рассматривается наравне с важнейшими характеристиками силовой установки, такими как надежность, вес и др.
Схемы крепления.
На очертание и силовую схему крепления двигателя существенное влияние оказывает тип двигателя и его компоновка на летательном аппарате. Чаще всего конструктивные схемы крепления двигателей представляют собой пространственные фермы, соединяющие двигатель с каркасом летательного аппарата и имеющие не менее шести стержней. При этом стержни должны быть расположены так, чтобы обеспечивалась геометрическая неизменяемость системы. Однако часто встречаются фермы, имеющие больше шести стержней, что способствует повышению живучести системы. Все силовые элементы крепления двигателя выполняются из легированных высокопрочных сталей, термически обработанных.
Крепление звездообразного ПД состоит из трубчатого кольца, к которому крепится картер двигателя, и восьми приваренных к кольцу стержней, соединяющихся с каркасом самолета. Кольцо и стержни выполнены из стали 30ХГСА и соединены в узлах при помощи сварки. Для усиления сварных узлов стыковка труб производится при помощи косынок. В местах крепления фермы к каркасу самолета в стержни вварены проушины или фитинги. Картер двигателя крепится к кольцу при помощи шпилек на резиновых втулках. Узлы крепления фермы к каркасу самолета имеют резиновые амортизаторы.
С точки зрения строительной механики конструкция крепления двигателя представляет собой пространственную ферму и относится к классу сложных статически неопределимых систем. Узлы крепления соединены сваркой и их можно было бы считать жесткими. В этом случае при нагружении фермы стержни будут работать на растяжение — сжатие и на изгиб. Но так как изгиб получается небольшим, то для расчетов сварные жесткие узлы можно заменить идеальными шарнирами, работающими без трения. Трубчатое кольцо и картер двигателя принимают за абсолютно жесткие тела. Тогда стержни крепления будут работать только на растяжение — сжатие.
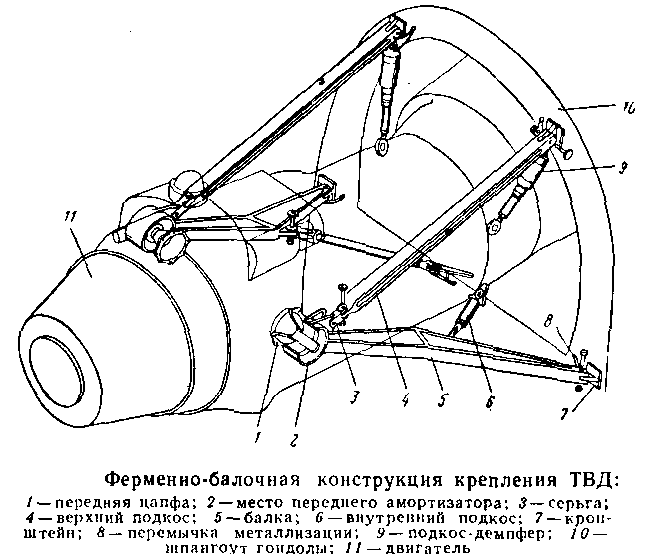
Крепление ТВД на летательном аппарате осуществляют при помощи пространственных стержневых систем, соединенных с узлами двигателя. Крепление может быть ферменного и ферменно-балочного типа.


На рисунке показано крепление двигателя к центроплану крыла посредством быстросъемной пространственной двухъярусной фермы и демпферов крепления двигателя к раме. К четырем амортизаторам рамы двигатель прикреплен при помощи двух передних и двух задних цапф. Нагрузку от тяги винта и часть нагрузки от веса двигателя, распределенную по правилу рычага, воспринимают передние амортизаторы. Задние амортизаторы воспринимают только часть веса двигателя.
Крепление двигателя состоит из рамы и силовой фермы. Рама состоит из восьми подкосов: шесть выполнены из стальных труб, на концах которых приварены крепежные детали, два задних представляют собой пустотелые стержни со смонтированными на них амортизаторам. Верхние, нижние и задние подкосы имеют на одном конце вилки с резьбовыми наконечниками, служащие для регулировки оси двигателя.
Силовая ферма служит для крепления рамы двигателя и силового шпангоута к лонжерону центроплана. Она состоит из восьми подкосов с узлами крепления ее к центроплану и с узлами для крепления силового шпангоута и рамы.
Конструкция крепления двигателя ферменно-балочного типа состоит из двух балок б и шести подкосов. Балки могут работать на изгиб от боковых сил. Стержни воспринимают лишь осевые нагрузки.
Двигатель крепится на четырех цапфах. Передние цапфы 1 вставлены в амортизаторы. При помощи балок и верхних подкосов передние цапфы передают нагрузки на силовой шпангоут гондолы двигателя. Нагрузка от задних цапф передается на силовой шпангоут гондолы посредством подкосов-демпферов. Положение двигателя может изменяться путем регулирования длины внутренних подкосов 6 и задних амортизаторов.
Крепление ТРД на летательном аппарате может быть осуществлено при помощи рам, состоящих из стержней, или, если двигатель крепится на пилоне под крылом или в хвостовой части фюзеляжа, — при помощи вильчатых узлов, расположенных сверху на корпусе двигателя. Особенностью крепления ТРД является наличие на самом двигателе силовых поясов. Минимальное количество силовых поясов—два, один из которых является основным. На основном силовом поясе располагаются узлы, воз принимающие нагрузки Рх, Ру и Pz, а также моменты Мх и Му, на дополнительных поясах — узлы, воспринимающие нагрузку Ру и момент У ТРД напряженный температурный режим, вследствие чего его корпус подвержен значительным температурным расширениям. Поэтому двигатель должен быть закреплен так, чтобы компенсировать температурные перемещения корпуса.

На рисунке справа показано крепление ТРД к силовым шпангоутам фюзеляжа. Особенностью этой схемы является ее асимметрия. Внутри стержневой системы, состоящей из шести основных стержней 3, 4, 5 и 7, 8, 9 и одного дополнительного стержня 6, имеется плоский узел, образованный стержнями 1 и 2. Правильное положение двигателя на самолете достигается регулировкой длины шести основных стержней. Каждый стержень имеет резиновый демпфер для поглощения вибраций во время работы двигателя.
Особый интерес представляет крепление ТРД, расположенных на пилонах в хвостовой части фюзеляжа (рисунок ниже ). Пилон является силовым промежуточным звеном между двигателем и фюзеляжем. Каждый двигатель крепится в трех точках к штампованным и механически обработанным консольным балкам 1 и 8, присоединяемым по две с каждой стороны фюзеляжа в плоскости переднего и заднего поясов крепления двигателя. Консольные балки двутаврового сечения, выполненные из высокопрочной стали, образуют кессон небольшой высоты. Верхняя и нижняя обшивки этого кессона изготовлены из стали и подкреплены стрингерами. В хвостовой части фюзеляжа имеется два мощных механически обработанных шпангоута 5 и 6, изготовленных из легкого сплава, к котором крепятся поперечные горизонтальные балки, имеющие стальные лонжероны 7 и стенки 8 из алюминиевого сплава. На передней балке установлены узлы, воспринимающие нагрузки Рх, Ру и Plt а также моменты Мх, Му и Mt. Узлы крепления двигателя на задней балке воспринимают силы Ру, Р2, моменты Му и M.z и обеспечивают температурное расширение двигателя. Аналогично выполняется крепление ТРД на пилонах, расположенных под крылом.

Конструкции систем крепления двигателей на вертолетах сходны с конструкциями систем крепления двигателей на самолетах. При этом должна быть обеспечена возможность регулирования установки двигателя для соединения вала двигателя с редуктором.
Расчет на прочность.
Крепление двигателя необходимо рассчитывать на все случаи, предусмотренные нормами прочности, для чего необходимо определить нагрузки, соответствующие случаям нагружения.
Рама звездообразного ПД является дважды статически неопределимой, так как имеет два лишних стержня. Ввиду того, что она имеет плоскость симметрии, расчет можно упростить: все нагрузки разбить на группу симметричных и группу обратно симметричных. К первым относятся нагрузки, одинаковые по величине симметрично расположенные относительно плоскости симметрии конструкции, а также нагрузки, лежащие в этой плоскости. Ко вторым относятся одинаковые по величине нагрузки, расположенные с обеих сторон плоскости симметрии конструкции таким образом, что они превращаются в симметричные, если с одной стороны плоскости симметрии направление нагрузок изменить на обратное. В симметричных стержнях усилия от симметричных нагрузок равны по величине и знаку, а в обратно симметричных равны по величине и противоположны по знаку. Исходя из вышесказанного рама ПД двигателя превращается в однажды статически неопределимую.
При определении усилий в стержнях рамы для различных случаев нагружения расчет удобно вести по симметричным и обратно симметричным нагрузкам в общем виде. Сначала учитывают действие симметричных нагрузок, а затем — обратно симметричных.
Для проведения расчета как при действии симметричных, так и обратно симметричных нагрузок необходимо:
1) выбрать основную систему;
2) определить усилия Sp, возникающие в стержнях основной системы от действия заданной нагрузки;
3) найти усилия Sb возникающие в стержнях основной системы от единичных сил, приложенных по направлению лишних неизвестных в нарушенных связях;
4)
вычислить перемещения в основной системе
по формулам:
![]() ,
,
![]() ,
где
,
где
![]() — перемещение по направлению х
от
X
= 1;
l,
Е,
F—
длина, модуль упругости материала и
площадь поперечного сечения стержня;
— перемещение по направлению х
от
X
= 1;
l,
Е,
F—
длина, модуль упругости материала и
площадь поперечного сечения стержня;
![]() перемещение
по направлению x1
от
заданной нагрузки;
перемещение
по направлению x1
от
заданной нагрузки;
5)
решить каноническое уравнение:
![]() ,
,
![]()
6)
найти полное усилие в стержнях способом
наложения
![]()
Перед этим необходимо провести вычисление косинусов углов, образуемых направлениями стержней и осями координат:
Расчет на действие симметричных нагрузок выполняется следующим образом. Выбирают основную систему. Для этого мысленно разрезают стержни 1—4 и 1'—4'. Так как усилия в этих стержнях одинаковы по величине и знаку, то обозначим их через Х1 и направим от двигателя, считая стержни растянутыми.
Находим усилия Sp в остальных шести стержнях основной системы от заданной нагрузки, предполагая стержни растянутыми и считая, что в симметричных стержнях усилия равны. Составив условия равновесия, имеем:

Из
формулы (5) определяем усилие
![]() :
:

Усилие
![]() находим из уравнения (6):
находим из уравнения (6):

Последнее
неизвестное усилие
![]() определяем из уравнения (7):
определяем из уравнения (7):

После этого необходимо произвести проверку правильности решения задачи. Если усилия в стержнях определены верно, то сумма проекций всех сил на ось у должна быть равна нулю.
При нагружении основной системы единичными силами X1 = 1 внешние силы Рх и Ру предполагаем равными нулю. Тогда уравнения равновесия примут вид:

Решая эти уравнения, находим:

Правильность
решения задачи контролируется равенством
нулю суммы проекций всех сил на ось у.
Результаты
расчета сводим в таблицу, по которой
производится расчет коэффициентов
и
![]() ,
а также действительных усилий, возникающих
в стержнях от симметричной нагрузки:
,
а также действительных усилий, возникающих
в стержнях от симметричной нагрузки:

Следующим этапом является расчет крепления при действии обратно симметричных нагрузок Рг, Мх, Му и Mz.
Основную систему выбираем прежней. Как и ранее, мысленно отсекаем переднюю часть силовой установки и составляем условия равновесия для отсеченной части. Слева от плоскости симметрии стержни считаем растянутыми, справа — сжатыми. Удовлетворяя условиям равновесия системы, получаем три уравнения с тремя неизвестными силовыми факторами , и . Решение указанных уравнений даст выражения для определения искомых усилий (методика составления уравнений и их решения аналогична приведенной ранее при рассмотрении действия симметричных нагрузок).
Затем
нагружаем основную систему силами Х1
=
1 и вычисляем усилия в стержнях, предполагая
внешние нагрузки равными нулю. Удовлетворяя
условиям равновесия, определяем
![]() ,
,
![]() и
и
![]() .
Составляем вспомогательную таблицу,
по которой рассчитываем усилия в
стержнях:
.
Составляем вспомогательную таблицу,
по которой рассчитываем усилия в
стержнях:

Полные усилия в стержнях при действии на крепление любых произвольных нагрузок находим как сумму двух усилий от действия симметричных и обратно симметричных нагрузок:
![]()
Необходимо отметить, что формулой (11) можно пользоваться только в тех случаях, когда напряжения в стержнях не превышают предела пропорциональности и ни один из сжатых стержней не теряет устойчивости. Предполагается, что при действии эксплуатационных нагрузок эти условия выполняются.
Если отдельные стержни начинают работать в области пластических деформаций или сжатые стержни теряют устойчивость, то действие каждого такого стержня на систему крепления заменяется силой Si, равной усилию в стержне, при котором наступает текучесть материала, или критической силе (при сжатии). Усилие S, в этих случаях считается заданной внешней нагрузкой, и расчет далее ведется описанным выше методом.
Расчет крепления ТВД ферменного типа ведется аналогичным образом.
Расчет крепления ТВД ферменно-балочного типа может быть проведен при предположении, что балка 5 от цапфы двигателя до крепления к внутреннему подкосу 6 представляет собой стержень. Так как стержень 6 не связан непосредственно с двигателем, то двигатель крепится шестью стержнями и система статически определима. Составив уравнение моментов относительно передней цапфы крепления двигателя, а также сумму проекций всех сил на оси х и у и приравняв проекции нулю, можно определить усилия в стержнях и балке. Полученное усилие в балке в точке соединения ее с внутренним подкосом раскладывается по двум направлениям — по внутреннему подкосу 6 и по балке от точки крепления подкоса к шпангоуту гондолы. После этого они легко находятся. При действии силы Pz балка работает на изгиб.

Определение усилий в стержнях асимметричной фермы крепления ТРД несколько сложнее, так как для этого необходимо решать большее число уравнений. Наименьшее количество стержней m пространственной фермы с плоскими узлами определяется уравнением:
![]() где
где
![]() и
и
![]() —
количество пространственных и плоских
узлов соответственно.
—
количество пространственных и плоских
узлов соответственно.
В рассматриваемой ферме =0 и =1. Следовательно, минимальное количество стержней должно быть равно восьми. В действительности ферма имеет девять стержней. Рассекаем ферму так, чтобы стержни 2—2' и 2—2" остались с двигателем, тогда ферма будет иметь один лишний стержень. В качестве лишнего можно принять любой из стержней. Если предположить, что лишним является стержень 11—12, то можно найти усилия в остальных шести стержнях (1—8, 3—2, 4—5, 10—6, 9—7 и 9—13) основной системы от внешних нагрузок. Для этого необходимо составить и решить шесть уравнений равновесия. В дальнейшем определяем усилия в стержнях от единичной нагрузки, действующей в лишнем стержне, и после этого полные усилия в стержнях. Зная усилие истержне2—3, можно определить усилия в стержнях 2—2' и 2—2", рассматривая равновесие плоского узла 2.