

-
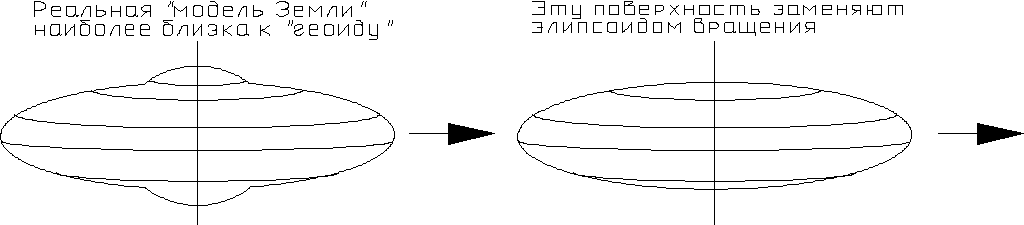
Характеристики Земли, ее атмосферы (см. Рис.1)
|
Более грубая
модель Земли – сфера с Rз=6371
км и вектором угловой скорости суточного
вращения
|
Наиболее простая модель Земли – местная горизонтальная плоскость (М.Г.П.). |
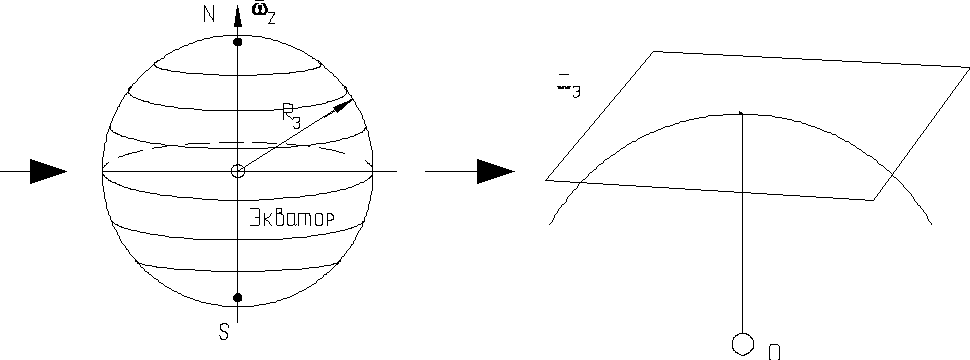

Рис. 1
Эллипсоид вращения, сфера используются при исследовании движения космических аппаратов, баллистических ракет. В случае если рассматривается движение ЛА с умеренными скоростями V 20003000 м/с в малой окрестности поверхности Земли, то Землю заменяют МГП. В этом случае горизонтальный полет на постоянной высоте считается прямолинейным. В других моделях Земли горизонтальный полет на постоянной высоте не является прямолинейным и будет иметь вид (рис.2).
Д
Рис.
2
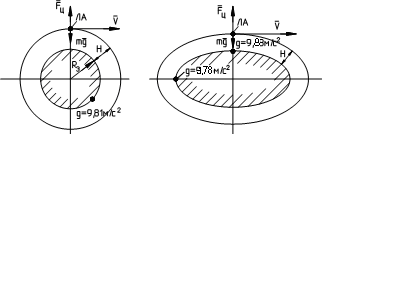
![]() ЛА, являющаяся центростремительной
силой и в противоположном направлении-
-фиктивная центробежная сила
ЛА, являющаяся центростремительной
силой и в противоположном направлении-
-фиктивная центробежная сила![]() .
Из условия равновесия получаем
.
Из условия равновесия получаем

У поверхности Земли: Н=0, Rз=6371000 м, g0=9,81 м/с2, имеем V07,9км/с=7900м/с.
Атмосфера становится исчезающе малой на высотах Н 100-115 км. В этом случае для спутника на высоте круговой орбиты Н = 100 км значение скорости определим как:
![]() .
.
Эта скорость называется круговой или первой космической.
Схематически траектории полёта в зависимости от величины начальной скорости V в начальной точке при угле наклона траектории = 0 можно изобразить в следующем виде (рис.3).
Е
Рис.
3
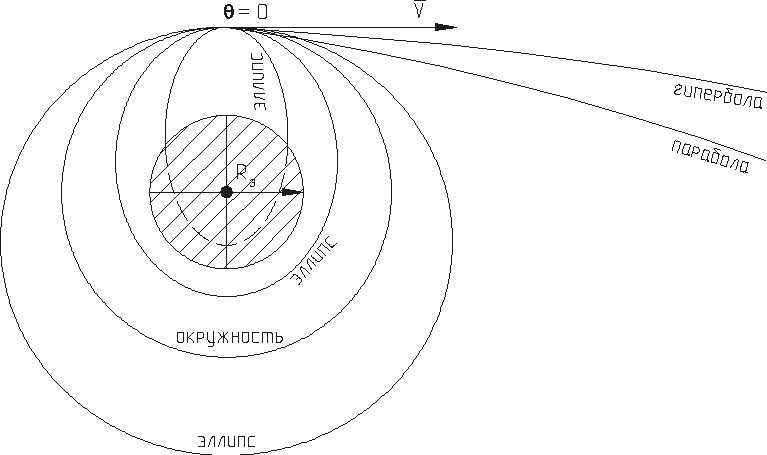
![]() то
скорость называется параболическая
или вторая космическая. При этой
скорости ЛА уходит из сферы притяжения
Земли. Иногда эту скорость называют
«скоростью ухода». При Vгип
> Vпар
скорости называют гиперболическими,
используемыми для дальних космических
полётов. В случае V
< Vкр
траектории становятся приближённо
эллиптическими (без учёта влияния
атмосферы Земли).
то
скорость называется параболическая
или вторая космическая. При этой
скорости ЛА уходит из сферы притяжения
Земли. Иногда эту скорость называют
«скоростью ухода». При Vгип
> Vпар
скорости называют гиперболическими,
используемыми для дальних космических
полётов. В случае V
< Vкр
траектории становятся приближённо
эллиптическими (без учёта влияния
атмосферы Земли).
В различных эллиптических траекториях центр масс Земли располагается в эксцентриситете эллипса. Эллипсы, пересекающие поверхность Земли, могут использоваться для описания движения баллистических ракет.
Расчеты показывают, что для
Земли: Vкр = 7,9 км/с; Vпар = 11,2 км/с;
Луны: Vкр = 1,7 км/с; Vпар = 2,4 км/с;
Марса: Vкр = 3,5 км/с; Vпар = 5 км/с.
Венеры: Vкр = 7,2 км/с; Vпар = 10.2 км/с.
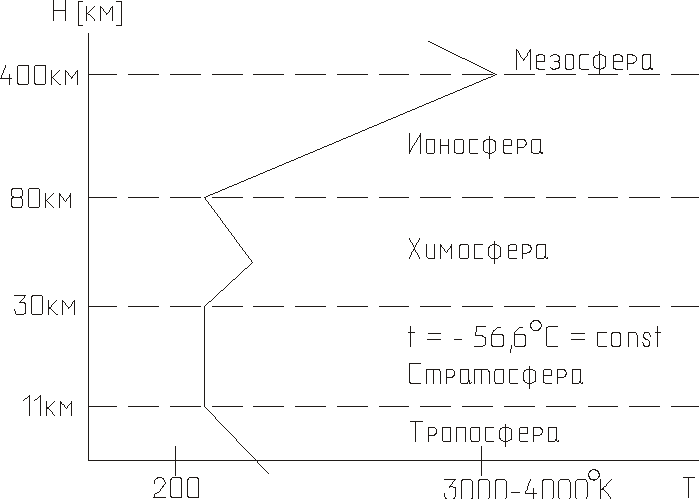
На рис. 4 изображено распределение температуры воздуха в атмосфере Земли
На рис.5 показано распределение плотности воздуха в атмосфере Земли 0 и выбирается в зависимости от исследуемого диапазона высот Н0 и Н
|
Рис. 4 |
Рис. 5 |
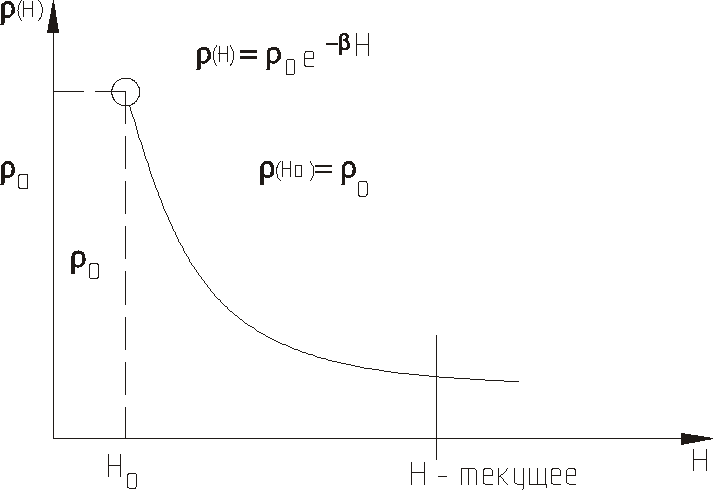
У поверхности
Земли ![]()
Лекция 2.
-
Аэродинамические силы и продольный момент изолированного крыла
ЛА можно разделить на составляющие, которые участвуют в создании аэродинамических сил и моментов. Наибольшую долю в создании подъемной силы обычно дает крыло. Суммарные силы и моменты всего ЛА складываются из сил и моментов его составляющих частей с учетом взаимного влияния (интерференции).
Рассмотрим сначала теоретические основы и предположения (гипотезы), на основе которых можно вывести соотношения для сил и момента изолированного крыла.
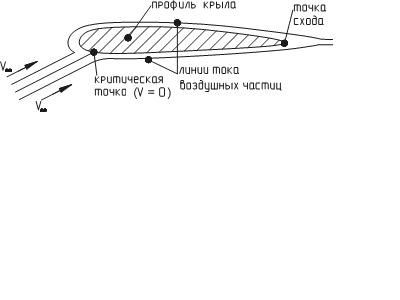
Исторически аэродинамика малых скоростей основывалась на постулате Н.Е. Жуковского (1847 - 1921) и С.А. Чаплыгина (1869 - 1942). Согласно этому постулату, точка схода воздушного потока, обтекающего крыло, фиксируется около задней кромки.
Э
Рис.
6
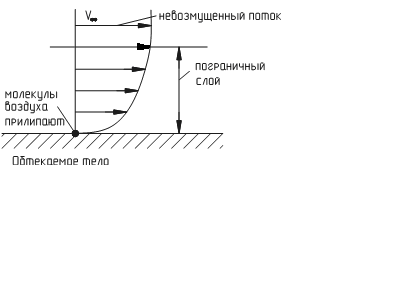
Вторая важная гипотеза и на ее основе теория пограничного слоя разработана немецким ученым А. Прандтлем. Согласно этой гипотезе вязкость (внутреннее трение) воздуха проявляется только в узком слое (пограничном слое), непосредственно примыкающем к поверхности обтекаемого крыла (см. рис. 7).
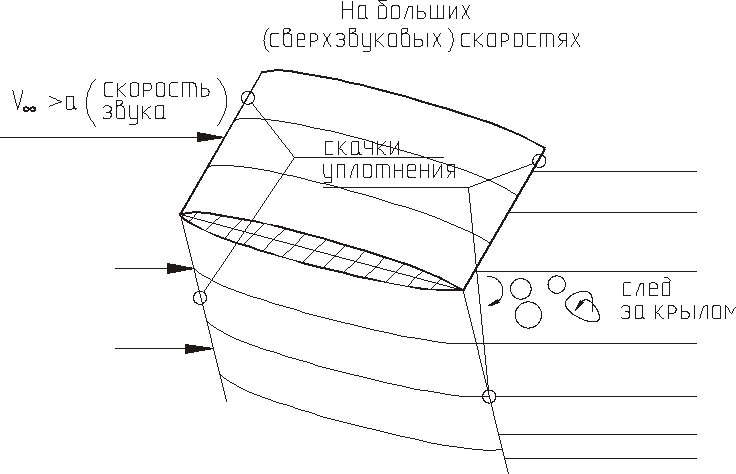
На рис. 8 а, б изображены картины обтекания крыльев на различных скоростях полета.
|
Рис. 7 |
Рис. 8а |
|
Рис. 8б |
О- точка
критическая
А, В – точки перехода ламинарного пограничного слоя в турбулентный. С – точка отрыва пограничного слоя.
Скачки уплотнения – поверхности, где скачком изменяются давление и скорость потока. При этом возникает дополнительное сопротивление профиля (крыла), которое называют волновым сопротивлением. |
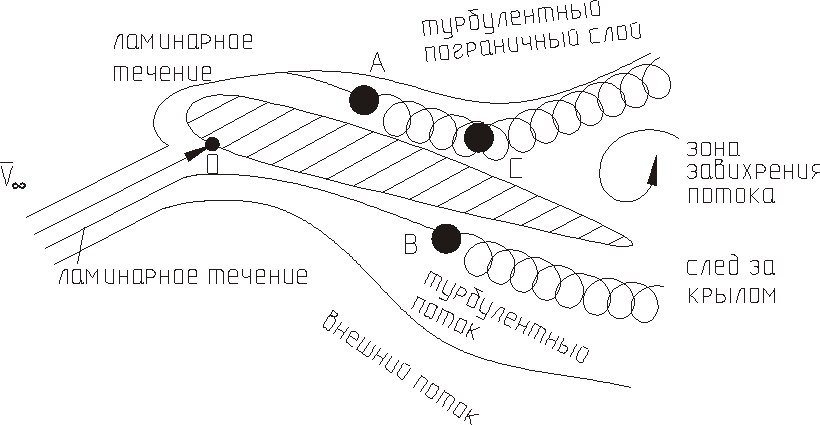
Наименьшее сопротивление профиля возникает при ламинарном течении потока. Турболизация потока вызывает увеличение сопротивления трения и уменьшение подъемной силы крыла.
Дополнительные потери возникают при отрыве пограничного слоя на верхней поверхности крыла, которые обычно появляются на больших углах обтекания профиля крыла.
Рассмотрим уравнение (интеграл) Бернулли с целью объяснения причин изменения параметров воздушного потока при обтекании крыла. Бернулли, ученый швейцарского происхождения, состоявший членом Петербургской Академии Наук, применил закон сохранения энергии к двигающейся жидкости (газа) внутри трубопровода с переменным сечением (рис. 9).
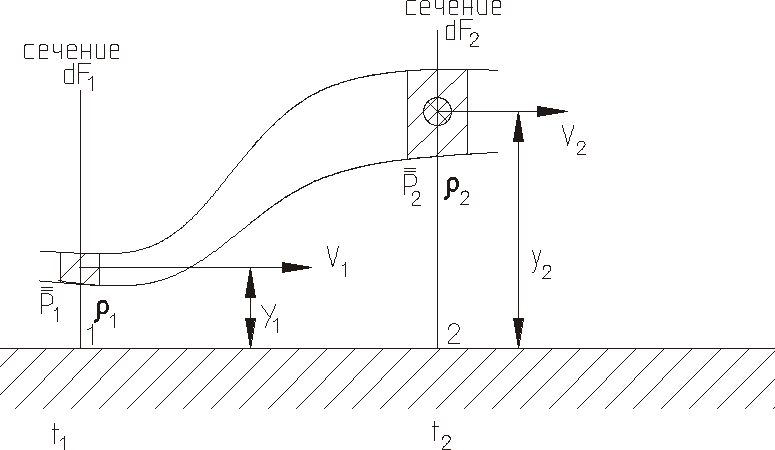
Рис.9
Обозначим:
dF1, dF2 – площади сечений 1, 2;
![]()
 давления
и массовые плотности в сечениях 1, 2;
давления
и массовые плотности в сечениях 1, 2;
 массы
массы
![]() в сечениях 1, 2.
в сечениях 1, 2.
Если пренебречь изменением внутренней тепловой энергии и внутренними потерями, то можно для несжимаемой жидкости записать сумму
трех видов энергий и считать эту величину постоянной
![]() ,
,
где:
![]() - потенциальная энергия,
- потенциальная энергия,
![]() - кинетическая энергия,
- кинетическая энергия,
![]() - потенциальная энергия давления (работа
сил давления).
- потенциальная энергия давления (работа
сил давления).
Поделив и умножив на
![]() третью составляющую, будем иметь:
третью составляющую, будем иметь:
![]()
или, поделив на m слева и справа, получим уравнение Бернулли (уравнение напоров)
![]() . (3.1)
. (3.1)
Рассмотрим (3.1) для двух расчетных
сечений, умножив предварительно на
![]()
![]() , (3.2)
, (3.2)
![]() -аэростатическое давление; p2-
статическое давление;
-аэростатическое давление; p2-
статическое давление;
![]() -
динамическое давление. Часто
обозначают:
-
динамическое давление. Часто
обозначают:![]() -скоростной
напор.
-скоростной
напор.