

Лекция 13.
10.3. Управление движением ла. Использование автоматических средств управления
В любом процессе управления участвует объект управления и управляющая система. Для нашего случая объектом является ЛА. В режиме автоматического управления управляющей системой является автопилот; а в режиме ручного (штурвального) управления – летчик с необходимым комплексом пилотажно-навигационных приборов.
Процесс управления осуществляется по замкнутому контуру, в котором ЛА можно рассматривать как звено системы управления.
Если управляющей системой
является автопилот, то в совокупности
с ЛА они образуют систему автоматического
управления – САУ. Упрощенно структуру
САУ можно представить в виде схемы (см.
рис.55), на которой yзад=(Jзад,
Hзад,
nyaзад,…)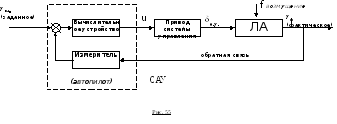
В соответствии с yф – yзад = ε – рассогласованием вырабатывается закон управления “u”, который в виде сигнала поступает на рулевой привод и отклоняет орган управления dо.у. для устранения рассогласования.
Замкнутая система «ЛА – автопилот» должна быть устойчивой и обеспечивать высокое качество процесса управления, т.е. обладать достаточной точностью и быстродействием при выполнении требований безопасности полета. При этом должны максимально использоваться маневренные свойства ЛА, упрощаться пилотирование на всех режимах полета.
Р
При ручном управлении летчик сравнивает фактические значения yф параметров (nx, ny, nz, α, J, V, H…) и др. с желаемыми для выполнения того или иного маневра yжел. При рассогласовании он отклоняет соответствующие органы управления dо.у непосред-
ственно через тяги от рычага управления для обратимой системы или через силовой привод – бустер для необратимой системы управления. Схема управления следующая (см. рис.56)
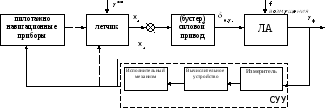



Рис. 56
Так как возможности конструктивной компоновки ЛА и летчика ограничены, то обычно применяют автоматические системы управления для помощи летчику. Для этой цели в систему ручного управления вводят автомат регулировки управления (АРУ), меняющий передаточный коэффициент рулевого тракта и градиент загрузки рычагов управления (АРЗ – автомат регулировки загрузки) по режимам и условиям полета, МТЭ – механизм траекторного эффекта и др.
Эти автоматы не формируют сами отклонение органов управления dо.у., но меняют соотношение между отклонением органа управления и соответствующего рычага управления летчиком в зависимости от измеренных значений высоты, скорости полета. Например, одно из соотношений – передаточный коэффициент рулевого тракта определяется как:
![]() где Xл – перемещение
рычага (ручки, педали) летчиком. Меняя
автоматически величину Кш
по режимам полета, АРУ –изменяет
характеристику управляемости- расход
рычага управления на выполнение того
или иного маневра. АРУ, АРЗ– облегчают
пилотирование на различных режимах
полета (уменьшают усилия и улучшают
различные характеристики управляемости).
где Xл – перемещение
рычага (ручки, педали) летчиком. Меняя
автоматически величину Кш
по режимам полета, АРУ –изменяет
характеристику управляемости- расход
рычага управления на выполнение того
или иного маневра. АРУ, АРЗ– облегчают
пилотирование на различных режимах
полета (уменьшают усилия и улучшают
различные характеристики управляемости).
Для улучшения устойчивости и управляемости АРУ, АРЗ недостаточно и необходима быстродействующая автоматическая система, работающая параллельно с летчиком, обеспечивая приемлемые характеристики устойчивости и управляемости. Такая система улучшения устойчивости и управляемости (СУУ) формирует дополнительные управляющие сигналы и в итоге – управление в соответствии с измеренными параметрами движения ЛА.
В зависимости от решаемых задач СУУ, в них применяются автоматы различных типов. Простейшими из автоматов являются автоматы демпфирования или демпферы. Они состоят из датчиков ωx ωy ωz угловых скоростей крена, рыскания и тангажа (ДУС), исполнительных механизмов, позволяющих параллельно летчику и независимо от него формировать сигнал на отклонение органа управления. Суммарное отклонение органа управления складывается из отклонения летчиком dо.у.л.. и демпфером (автоматом) dо.у.а.:
dо.у.= dо.у.л.+ dо.у.а., (10.2)
где dо.у.а.=Кω ω.
Для канала тангажа это ωz , для крена - ωx , для рыскания - ωy . Кω – коэффициент усиления. Знак dо.у.а. выбирается так, чтобы гасить, демпфировать возникшее вращение.
Возвращение на исходный режим полета обеспечивает более сложный автомат – автомат устойчивости, в котором сигнал dо.у.а. формируется по изменению не только угловой скорости, но и углового отклонения - ∆α ,∆β или отклонения перегрузок ∆ny , ∆nz . Например, для автомата продольной устойчивости (канал тангажа) руль высоты отклоняется по закону:
dв.a. = Кω ωz + Кα ∆α (10.3)
при измерении датчиком отклонения угла a или
dв.a. = Кω ωz + Кn ∆ny (10.4)
при измерении акселерометром отклонения перегрузки от расчетного значения в опорном движении. Подбором n) -добиваются улучшения динамических характеристик ЛА как объекта управления.