

Лекция 14.
10.4. Показатели статической устойчивости и управляемости
В продольном движении принято рассматривать статическую устойчивость по перегрузке и скорости, а статическую управляемость характеризуют балансировочными отклонениями руля (стабилизатора) и их изменением (градиентом) при изменении скорости и перегрузки nya.
Степень
продольной статической устойчивости
по перегрузке при фиксированном руле
высоты
![]() выражается формулой:
выражается формулой:
 (10.5)
(10.5)
или
 .
(10.6)
.
(10.6)
Приближенно
![]() ,
(10.7)
,
(10.7)
где обозначены частные
производные:
![]() m
- относительная плот-
m
- относительная плот-
н![]() ость
ЛА,
ость
ЛА,![]() и
и![]() -
соответственно относительные фокусы
по углу атаки всего ЛА ( с учетом тяги
двигателей) и обусловленного только
аэродинамическими силами;
-
соответственно относительные фокусы
по углу атаки всего ЛА ( с учетом тяги
двигателей) и обусловленного только
аэродинамическими силами;
Рис.
57
![]() ;
;![]() -зависит
от двух составляющих
-зависит
от двух составляющих
![]() (10.8)
(10.8)
где вторая составляющая
![]() ,зависящая
от тяги работающего двигателя, обычно
невелика и приближенно можно считать,
что фокус ЛА по углу атаки (или
кратко «фокус ЛА») представляет
собой точку на продольной оси приложения
приращения подъемной силы, обусловленной
изменением угла атаки, т.е. точку,
относительно которой момент тангажа
остается постоянным при изменениях
,зависящая
от тяги работающего двигателя, обычно
невелика и приближенно можно считать,
что фокус ЛА по углу атаки (или
кратко «фокус ЛА») представляет
собой точку на продольной оси приложения
приращения подъемной силы, обусловленной
изменением угла атаки, т.е. точку,
относительно которой момент тангажа
остается постоянным при изменениях
![]() (рис.57)
(рис.57)
![]() .
(10.9)
.
(10.9)
Продольная статическая устойчивость по скорости с фиксированным рулем высоты определяется в прямолинейном полете с изменяющейся скоростью и постоянной nya=const. Обозначается степень устойчивости следующей полной производной
 (10.10)
(10.10)
![]() вычисляется при M=const;
вычисляется при M=const;
![]() вычисляется при Cya=const.
Принимается
вычисляется при Cya=const.
Принимается
(<0) - для статистически устойчивого ЛА;
(>0) - для статистически неустойчивого ЛА (см. рис. 58).
В частности, в случае горизонтального полета

![]() (10.11)
(10.11)
С тепень
путевой (флюгерной) статической
устойчивости (по
тепень
путевой (флюгерной) статической
устойчивости (по![]() определяется
величиной производной)
определяется
величиной производной)
![]() ;
(10.12)
;
(10.12)
Принимается (<0) – для статически устойчивого ЛА
Рис. 58
Для увеличения путевой статической устойчивости увеличивают площадь верти-кального оперения, устанавливают симметричные кили, шайбы на горизонтальном оперении, автоматические средства повышения устойчивости и др.
Степень поперечной статической устойчивости определяют величиной производной
![]() .
(10.13)
.
(10.13)
Принимается (<0) – для статически устойчивого ЛА.
Характеристики статической управляемости определяются потребными для балансировки ЛА отклонениями органов управления, перемещениями рычагов управления. Для этой цели строятся различные балансировочные зависимости. Например, для самолёта балансировочные зависимости могут иметь вид:
|
Рис. 59 а) |
Рис. 59 б) |
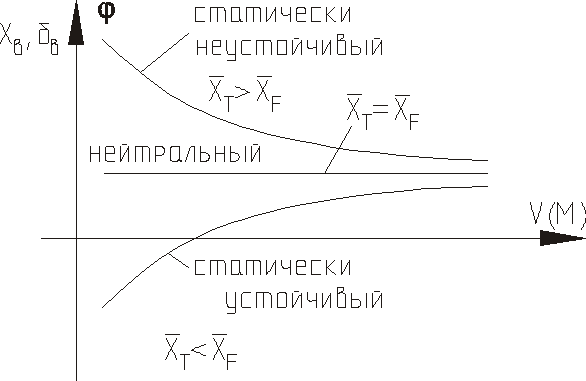
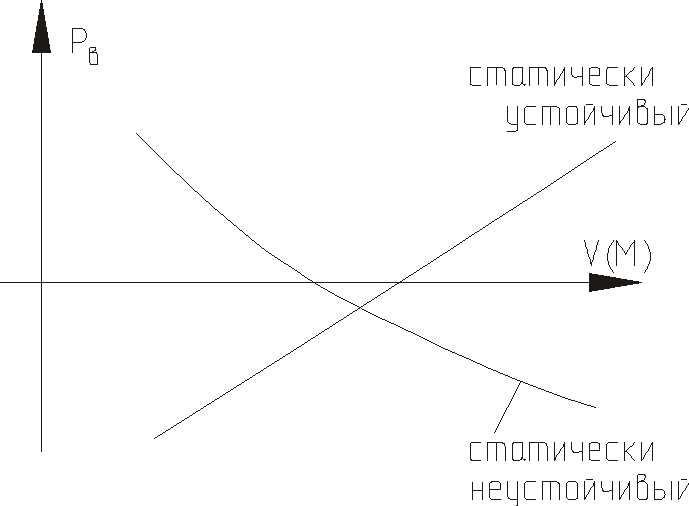
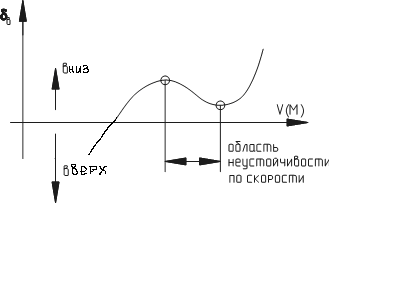
Рис. 59 в)
В области
неустойчивости по скорости производные,
характеризующие управляемость становятся
обратного знака (отрицательными):
![]() .
.
В случае криволинейного полёта с постоянной скоростью степень управляемости характеризуют производными
![]() ,
(10.14)
,
(10.14)
которые называют соответственно
коэффициентами расхода ручки (штурвала)
и усилий на перегрузку
![]() .
.
В
боковом движении определяются аналогичные
производные
![]()
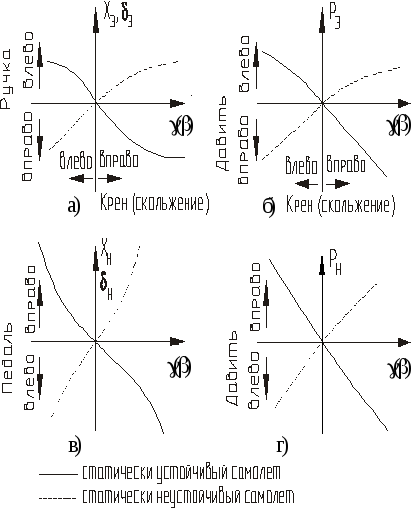
Рис. 60 (а, б, в, г)
Эти
балансировочные кривые используются
для характеристик
управляемости ЛА в
путевом (по β)
и поперечном
(по γ)
отношении. Коэффициенты
![]() характеризуют расход усилий и ручки с
педалями на угол крена.
характеризуют расход усилий и ручки с
педалями на угол крена.
На все характеристики управляемости устанавливаются нормативные ограничения.