

2.2. Нахождение переходного процесса в сар
с использованием теоремы разложения
В
соответствии с (2.4) изображение по Лапласу
выходной величины системы
![]() ,
где корни
,
где корни
![]() найдены методом Берстоу;
найдены методом Берстоу;
![]() .
.
Осуществим обратное преобразование Лапласа изображения по теореме разложения [9]:
-
Для простых корней:
![]() ;
(2.15)
;
(2.15)
-
Для кратных корней, где s – кратность корня:
 ;
(2.16)
;
(2.16)
3)
Для комплексно-сопряженных корней
![]() (
(![]() - мнимая единица) выведем формулу по
теореме разложения (2.15)
для простых корней [26].
- мнимая единица) выведем формулу по
теореме разложения (2.15)
для простых корней [26].
Так
как полиномы от комплексно-сопряженных
чисел являются комплексно-сопряженными
числами, то

Тогда



![]() .(2.17)
.(2.17)
-
Для двух действительных кратных корней
 :
:

 ,(2.18)
,(2.18)
где
![]() .
.
Рассмотрим нахождение переходного процесса для передаточной функции
![]() ,
,
где найденные методом Берстоу корни знаменателя:
р1 = -0,324; р2 = -0,518; р3 = -0,181 + 1,62j; р4 = -0,181 - 1,62j;
р5 = -1,026 + 3,31j; р6 = -1,026 – 3,31j; р7 = -0,669.
Тогда:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
,
![]() .
.
Для простых корней:
![]() .
.
Подставим
pi
в
yi(t)
и получим:
![]()
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Для комплексно-сопряженных корней:
![]() ,
,

Подставляя pi в B(pi) и D(pi), получим:


Отсюда следует:
![]() ;
;
![]() .
.
Окончательно
![]()
![]() .
(2.19)
.
(2.19)
Формула и график функции у(t) исследуемого переходного процесса, полученные при работе программы «SAU», изображены на рисунке 2.1.

Рис.2.1. График функции переходного процесса
Из рис.2.1 можно сделать следующий вывод о переходном процессе в рассмотренной САР. На характер переходного процесса влияют колебательные составляющие:
![]() и
и
![]() ,
,
поэтому вид кривой носит колебательный характер.
Однако действительный корень р1 = -0,324 находится ближе к мнимой оси, поэтому апериодическая составляющая преобладает в переходном процессе. Поскольку действительный корень р1 = -0,324 находится близко от пары комплексных корней р3 = -0,181 + 1,62j; р4 = -0,181 - 1,62j, он гасит колебания составляющей у3,4. Это приводит к тому, что перерегулирование в системе практически отсутствует.
Примеры расчета корней характеристического уравнения и переходных процессов в САР
Для проверки корректной работы программы был осуществлен расчет корней характеристического уравнения и переходных процессов для всех вариантов методических указаний [26] и были получены верные результаты. Представим расчет корней характеристического уравнения и переходного процесса еще для двух примеров.
Структурные схемы, передаточные функции САР, найденные по их структурным схемам, ввод передаточных функций звеньев и их характеристик, переход от передаточных функций САР к полиномиальному представлению для этих двух примеров приведены в разделе 1.7.
Пример №2.
Передаточная функция объекта:
![]() .
.
Получим полином:
![]()
Корни полученного полинома будут равны:
р1 = -2,51; р2 = -0,073 + 0,937j; р3 = -0,073 – 0,937j;
р4 = -0,822 + 0,253j; р5 = -0,822 – 0,253j.
Переходный процесс:
![]() (2.20)
(2.20)
Формула и график функции у(t) переходного процесса, полученные при работе программы «SAU», приведены на рисунке 2.2.
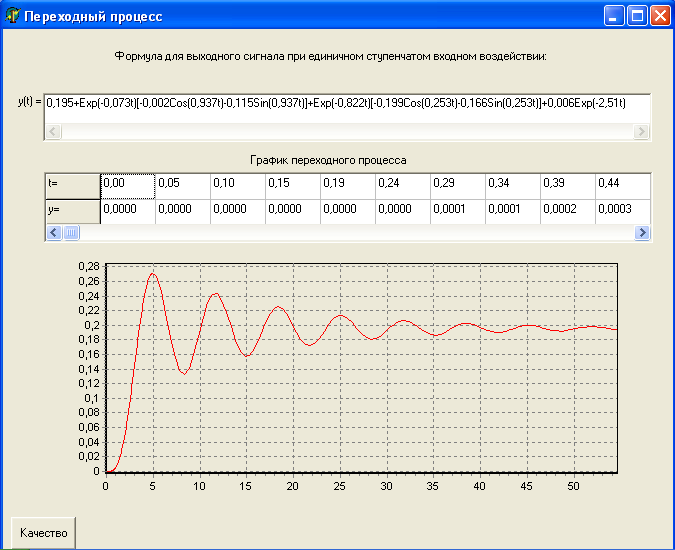
Рис. 2.2. График переходного процесса для примера №2
Из полученных результатов можно сделать следующие выводы о переходном процессе в рассмотренной САР.
Кривая
переходного процесса имеет колебательный
характер, так как (см. рис.2.3) доминирующей
является пара комплексно-сопряженных
корней р2,3
= -0,0730,937j,
а корень р1=-2,51
находится намного дальше от мнимой оси
и не оказывает существенного влияния
на процесс. На переходный процесс
наиболее сильное влияние оказывает
колебательная составляющая:![]() .
.

Рис. 2.3. Плоскость корней для примера №2
3. РАСЧЕТ КРИТЕРИЕВ КАЧЕСТВА СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Качество работы любой системы регулирования, в конечном счете, определяется величиной ошибки, равной разности между требуемым и действительным значениями регулируемой величины: x(t) = g(t) – y(t). В системах стабилизации при g(t) = 0 ошибка x(t) = -y(t).
Значение мгновенного значения ошибки в течение всего времени работы регулируемого объекта позволяет наиболее полно судить о свойствах системы регулирования. Однако в действительности, вследствие случайности управляющего и возмущающего воздействий, такой подход не может быть реализован. Поэтому приходится оценивать качество регулирования системы по некоторым ее свойствам, проявляющимся при различных типовых воздействиях. Для определения качественных показателей системы регулирования используются критерии качества.
В настоящее время разработано большое число различных критериев качества систем регулирования. Все их можно разбить на группы [5,15].
К первой группе относятся критерии, в той или иной степени использующие для оценки качества величину ошибки в различных типовых режимах. Эту группу называют критериями точности систем регулирования.
Ко второй группе относятся критерии, определяющие величину запаса устойчивости, т.е. критерии, устанавливающие, насколько далеко от границы устойчивости находится система регулирования.
Третья группа критериев качества определяет так называемое быстродействие систем регулирования. Под быстродействием понимается быстрота реагирования системы регулирования на появление управляющих и возмущающих воздействий. Наиболее просто может оцениваться быстродействие по времени затухания переходного процесса системы.
К четвертой группе относятся комплексные критерии, дающие оценку некоторых обобщенных свойств, которые могут учитывать точность, запас устойчивости и быстродействие. Обычно это делается при помощи рассмотрения некоторых интегральных свойств кривой переходного процесса.