

8. Автоматическое регулирование частоты вращения в системе уп-д с п-регулятором
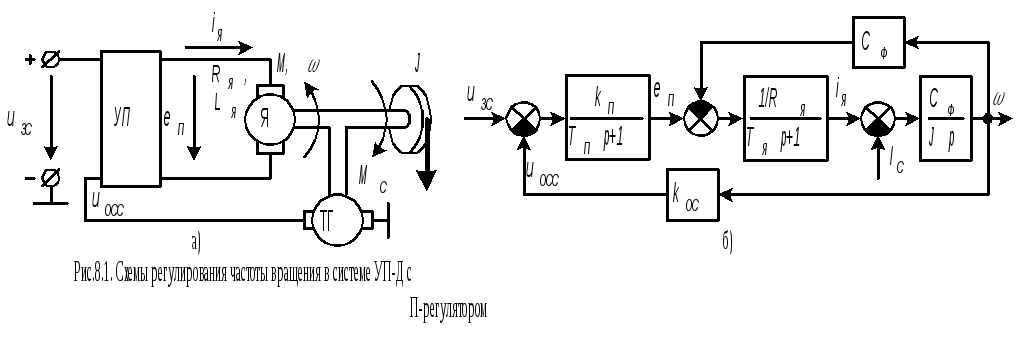
Функциональная и структурные схемы приведена, соответственно, на рис.8.1а. и рис.8.1б.
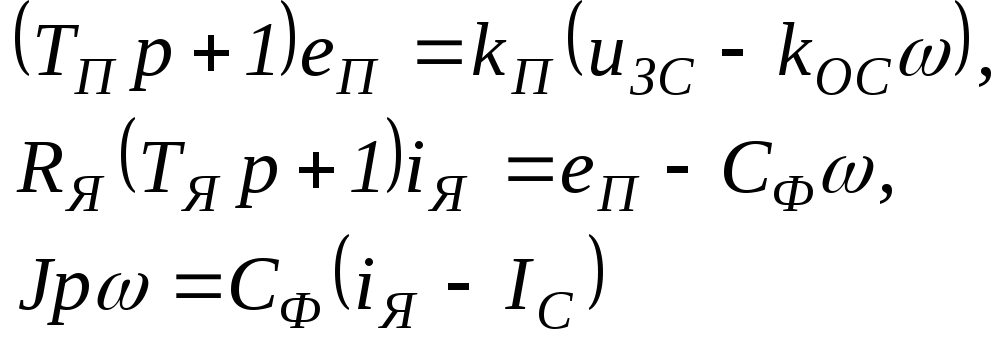
Пользуясь структурной схемой, составляем систему уравнений АЭП
 (8.1)
(8.1)
Система (8.1) из трех уравнений содержит три переменные-функции еП, iЯ и ω. Поэтому можно из системы (8.1) найти частоту ω как функцию от сигналов-аргументов uЗС и IС
ω=WУ uЗС+WВ IС, (8.2)
где WУ и WВ – передаточные функции, соответственно, по управлению и возмущению.
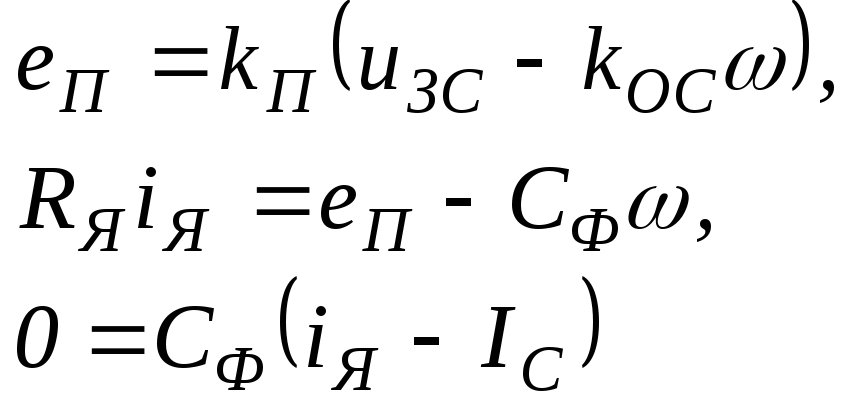
Рассчитаем статические характеристики АЭП, приняв р=0 в уравнениях системы (8.1):
 (8.2)
(8.2)
Исключая из системы еП, получим электромеханическую и механическую характеристики
 (8.3)
(8.3)
В соответствии с последним уравнением системы (8.2) ток якоря iЯ в установившемся режиме будет равным току IC сопротивления нагрузки.
Механические характеристики АЭП приведены на рис.8.2. Частота холостого хода ω0i прямо пропорциональна напряжению задания скорости uЗС. Механические характеристики АЭП наклонные (мягкие), т.е. частота вращения зависит от нагрузки двигателя. Жесткость механических характеристик АЭП больше
ж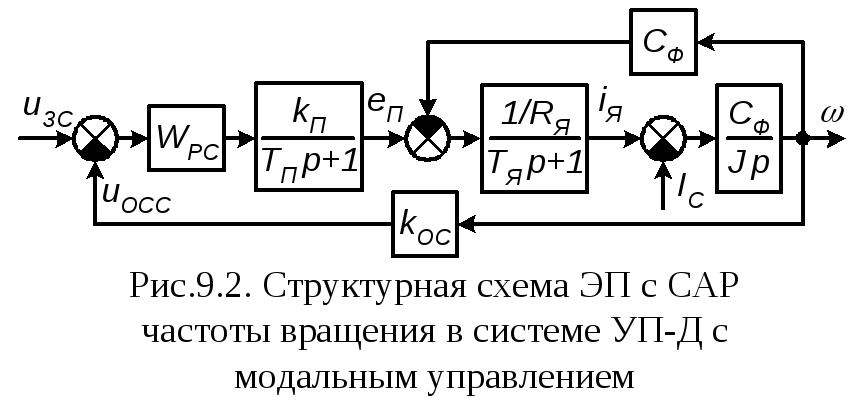 есткости
естественной характеристики в
есткости
естественной характеристики в
![]() раз. За счет увеличения значения
коэффициента передачи kП
П-регулятора можно лишь повысить
жесткость механических характеристик
и, соответственно, лишь уменьшить ошибку
регулирования частоты вращения, не
обращая ошибку регулирования в ноль.
раз. За счет увеличения значения
коэффициента передачи kП
П-регулятора можно лишь повысить
жесткость механических характеристик
и, соответственно, лишь уменьшить ошибку
регулирования частоты вращения, не
обращая ошибку регулирования в ноль.
Динамические характеристики не соответствуют ни одной настройке модального управления.
9. Автоматическое регулирование частоты вращения в системе уп-д, настроенной на технический оптимум
Функциональная и структурная схемы приведены, соответственно, на рис.9.1. и рис.9.2. В схему введен регулятор скорости РС. Выбором передаточной функции РС можно обеспечить работу АЭП с показателями качества, отвечающими техническому оптимуму. Для синтеза РС необходимо структурную схему АЭП привести к стандартному виду, три особенности структуры уже описаны в начале темы 7.
С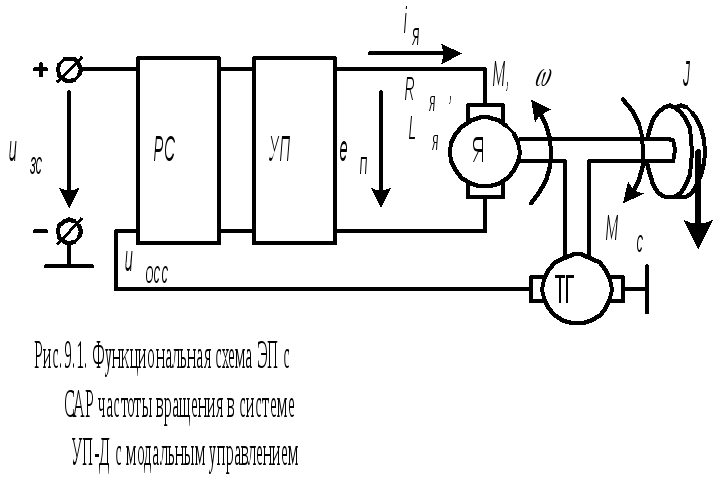 начала
нужно оставить только один входной
сигнал. Процедура избавления от второго
сигнала аналогична описанной в вопросе
7. Сначала заменяем все сигналы в схеме
рис.9.2 на отклонения. Тогда на схеме
рис.9.2 перед всеми обозначениями сигналов
нужно добавить значок Δ,
не изменяя самой схемы. Затем принимаем
постоянным момент сопротивления
нагрузки, что эквивалентно тому, что
IC=const
или ΔIC=0.
В результате входной сигнал ΔIC
схемы можно не учитывать, так как его
значение постоянно нулевое, и удалить
из структурной схемы ЭП элемент вычитания
токов iЯ
и IC.
начала
нужно оставить только один входной
сигнал. Процедура избавления от второго
сигнала аналогична описанной в вопросе
7. Сначала заменяем все сигналы в схеме
рис.9.2 на отклонения. Тогда на схеме
рис.9.2 перед всеми обозначениями сигналов
нужно добавить значок Δ,
не изменяя самой схемы. Затем принимаем
постоянным момент сопротивления
нагрузки, что эквивалентно тому, что
IC=const
или ΔIC=0.
В результате входной сигнал ΔIC
схемы можно не учитывать, так как его
значение постоянно нулевое, и удалить
из структурной схемы ЭП элемент вычитания
токов iЯ
и IC.
Далее оставшиеся три блока структурной схемы ДПТ, сворачиваем в один блок с передаточной функцией Wy(p) (4.5).
Структурная схема АЭП стандартного вида приведена на рис.9.3.
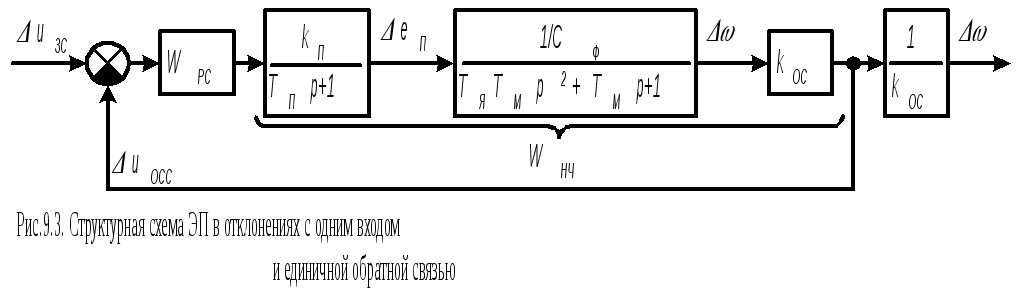
Задаемся желаемой
передаточной функцией вида
![]() ,
в которой малая постоянная времени Тμ
принята равной ТП.
Для синтеза РС
используем выражение (2.6):
,
в которой малая постоянная времени Тμ
принята равной ТП.
Для синтеза РС
используем выражение (2.6):
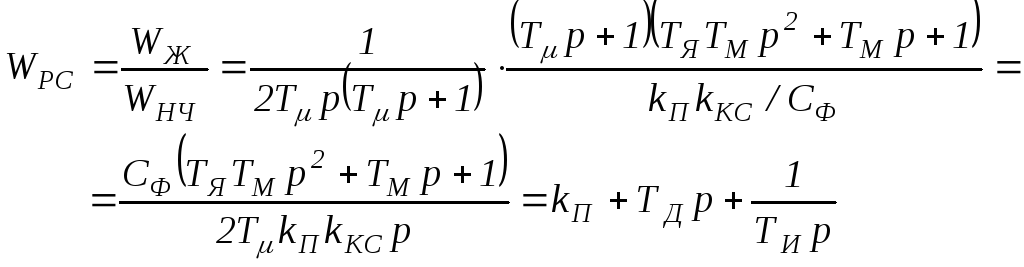 (9.1)
(9.1)
Это ПИД-регулятор частоты вращения, и в нем содержится Д-часть, которая чувствительна к помехам.
Динамические показатели качества соответствуют (2.2). Ошибка регулирования нулевая. Из этого свойства ошибки регулирования следует абсолютно жесткая механическая характеристика: частота вращения не зависит от момента сопротивления нагрузки.
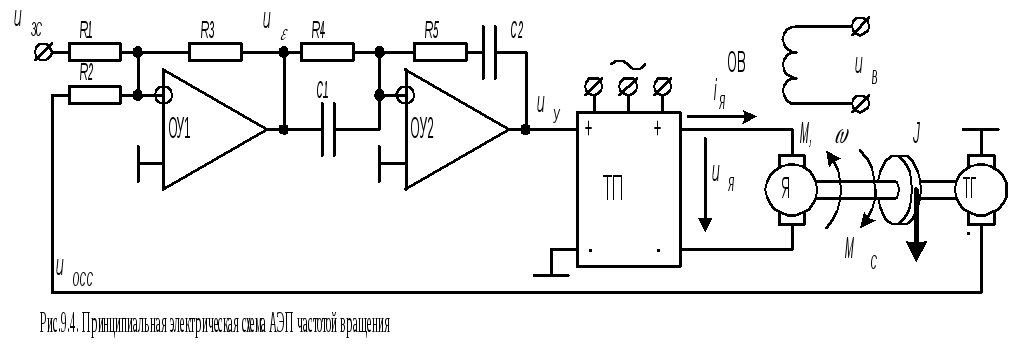
Регулятор скорости реализован на ОУ2, элемент сравнения – на ОУ1 (рис.9.4). Схема на ОУ2 имеет передаточную функцию
 (9.2)
(9.2)