

26. Структурная схема ад в осях х-у, ориентированных
по потокосцеплению ротора при Ψ2=const
Выше установлены аналогии сигналов и механических характеристик ДПТ и АД в осях х-у.
С целью получения уравнений и структурной схемы электропривода с АД в осях х-у в таких формах, которые были бы подобны уравнениям обмоток и структурной схеме ДПТ, продолжим преобразования выражений, входящих: в системы (25.7), (25.8), в выражение момента (25.9) и в уравнения механики (24.4):
 (26.1)
(26.1)
 (26.2)
(26.2)
![]() (26.3)
(26.3)
Преобразуем раздельно по осям х и у уравнения цепи статора (26.1), исключив из них потокосцепления Ψ1х, и Ψ1у и Ψ2.
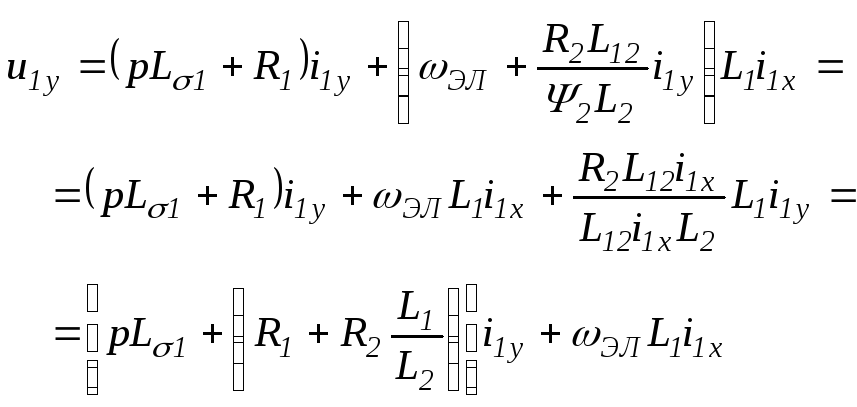
Преобразования уравнения цепи статора по оси у
Как следует из табл.25.1, это силовая цепь АД в осях х-у.
Подставим выражения Ψ1х и Ψ1у из (26.2) во второе уравнение системы (26.1):
![]() (26.4)
(26.4)
Из (25.11) найдем
![]() (26.5)
(26.5)
и подставим в (26.4)
 (26.6)
(26.6)
Сопротивление
![]() является, как известно из курса
электрических машин, приведенным
сопротивлением ротора
является, как известно из курса
электрических машин, приведенным
сопротивлением ротора
![]() АД, а сумма сопротивлений R1
и
АД, а сумма сопротивлений R1
и
![]() является активным сопротивлением
короткого замыкания RК.
С учетом этого уравнение (26.6) примет вид
является активным сопротивлением
короткого замыкания RК.
С учетом этого уравнение (26.6) примет вид
![]() (26.7)
(26.7)
При Ψ2=const
согласно второго выражения системы
(26.2) будет также постоянным ток i1x.
Поэтому в выражении (26.7) комплекс L1i1x
является постоянной величиной, которую
обозначим как СЕ.
Введем обозначение постоянной времени
рассеяния статора
![]() .
Уравнение (26.7) преобразится в
.
Уравнение (26.7) преобразится в
![]() (26.8)
(26.8)
Это уравнение полностью совпадает по структуре с уравнением цепи якоря ДПТ (4.2)
![]() ,
(26.9)
,
(26.9)
что также подтверждает аналогию сигналов, отображенную в табл.25.1.
Преобразования уравнения цепи статора по оси х
Как следует из табл.25.1, это цепь возбуждения АД в осях х-у.
Подставим выражения Ψ1х и Ψ1у из (26.2) в первое уравнение системы (26.1) и учтем ранее введенное обозначение Lσ1 и выражение (26.5)
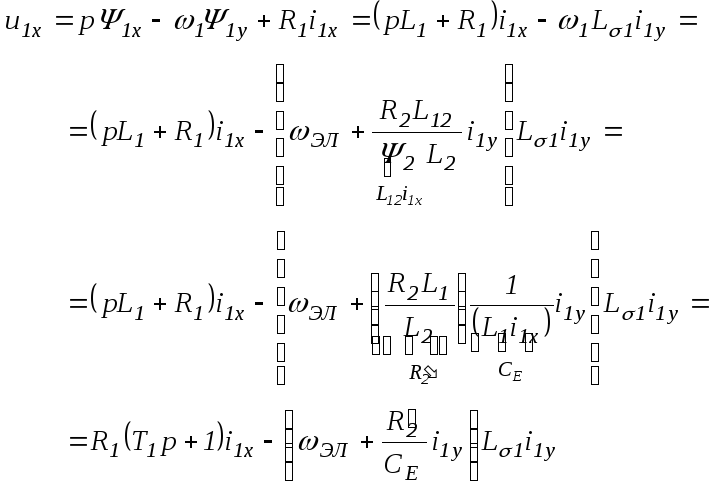 (26.10)
(26.10)
где Т1 – постоянная времени обмотки статора АД.
Структурная схема АД, приведенная на рис.26.1, составлена по выражениям (26.3), (26.8) и (26.10).
В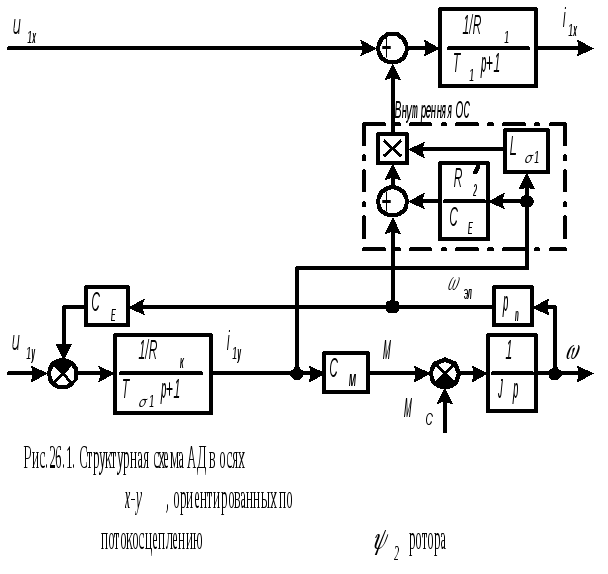 идно,
что структурная схема АД несколько
отличается от структурной схемы ДПТ
(рис.4.1). Это различие следует проанализировать
и далее оно должно быть устранено (тема
30).
идно,
что структурная схема АД несколько
отличается от структурной схемы ДПТ
(рис.4.1). Это различие следует проанализировать
и далее оно должно быть устранено (тема
30).
Уравнение цепи обмотки возбуждения ДПТ имеет вид
![]() (26.11)
(26.11)
Выражение (26.10)
отличается от (26.11) наличием дополнительного
члена
 ,
который никакими преобразованиями не
удается исключить из уравнения цепи
статора по оси х.
Этот дополнительный член указывает на
влияние силовой цепи (по оси у)
на цепь возбуждения (по оси х).
Это влияние, по сути, является внутренней
обратной связью в АД. Такое же влияние
цепи якоря на магнитное поле обмотки
возбуждения существует и в ДПТ и
называется это влияние "реакцией
якоря". Реакция якоря в ДПТ устраняется
конструктивно путем установки на статоре
ДПТ компенсационной обмотки. Влияние
силовой цепи на цепь возбуждения в АД
устранить конструктивно никак нельзя,
а будет устранено схемотехнически
посредством введения в схему АЭП
электронного блока компенсации БК
(см. тему 30).
,
который никакими преобразованиями не
удается исключить из уравнения цепи
статора по оси х.
Этот дополнительный член указывает на
влияние силовой цепи (по оси у)
на цепь возбуждения (по оси х).
Это влияние, по сути, является внутренней
обратной связью в АД. Такое же влияние
цепи якоря на магнитное поле обмотки
возбуждения существует и в ДПТ и
называется это влияние "реакцией
якоря". Реакция якоря в ДПТ устраняется
конструктивно путем установки на статоре
ДПТ компенсационной обмотки. Влияние
силовой цепи на цепь возбуждения в АД
устранить конструктивно никак нельзя,
а будет устранено схемотехнически
посредством введения в схему АЭП
электронного блока компенсации БК
(см. тему 30).