

13. Уравнения ад в комплексных переменных. Электрические схемы замещения ад. Механические характеристики
В основе скалярного управления АД лежит использование при управлении действующих значений сигналов (токов, напряжений) АД, а не их мгновенных значений. Мгновенные значения, как будет показано в теме 21, определяются как проекции обобщенных вращающихся векторов на выбранные оси, например, на ось фазы А, на ось поля ротора.
В силу идентичности трех фазных обмоток АД принято в расчетах использовать однофазную модель АД, по которой все расчеты токов и напряжений в точности совпадают с расчетами на реальном трехфазном АД, а энергетические характеристики, вычисленные для одной фазы, умножаются на 3. Ротор, если не учитывать эффекты вытеснения тока в его обмотках, также представляется тремя однофазными обмотками.
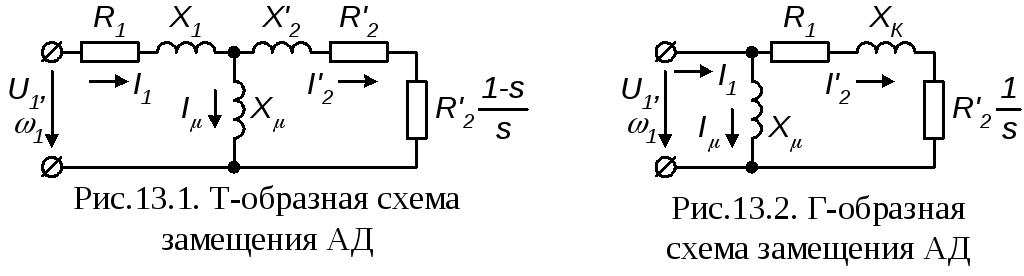
Основной является Т-образная схема замещения АД (одной фазы), которая приведена на рис.13.1. Схема описывается системой уравнений
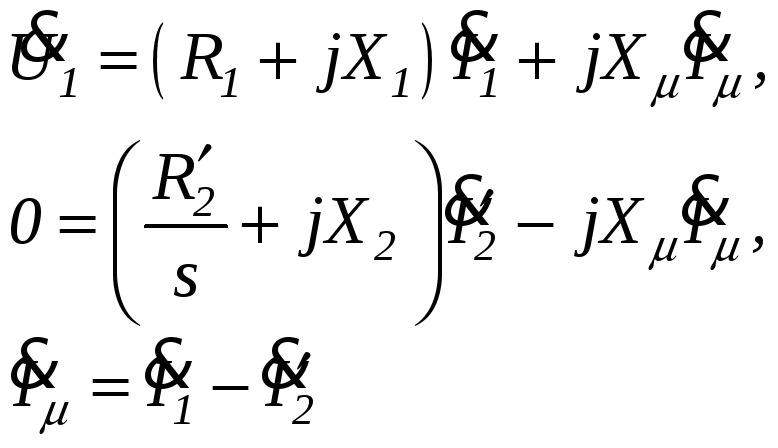 (13.1)
(13.1)
Электромеханическая мощность и вращающий момент на валу АД
 ,
(13.2)
,
(13.2)
где ω0 – частота вращения магнитного поля статора.
Из-за смешанного
соединения элементов в Т-образной схеме
формулы расчета токов и напряжений
ветвей (обмоток АД) получаются громоздкие.
Поэтому в инженерных расчетах используется
более простая, но достаточно точная
Г-образная схема замещения (рис.13.2), где
![]() .
.
Ток ротора
![]() из Г-образной схемы определяется формулой
из Г-образной схемы определяется формулой
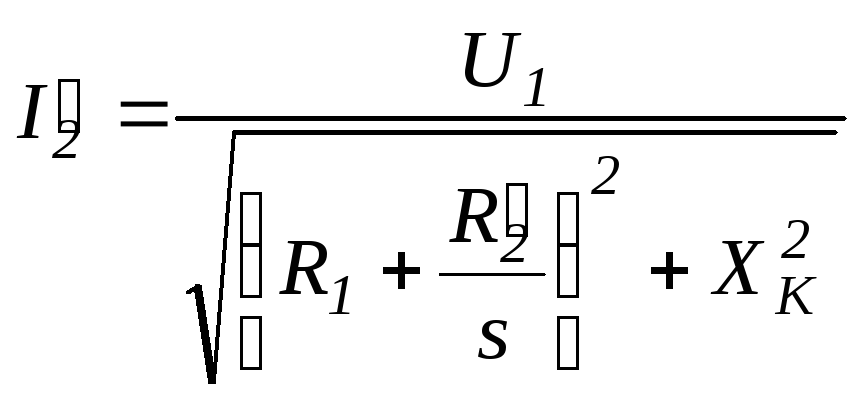 (13.3)
(13.3)
Подставив (13.3) в формулу (13.2), получим выражение момента АД
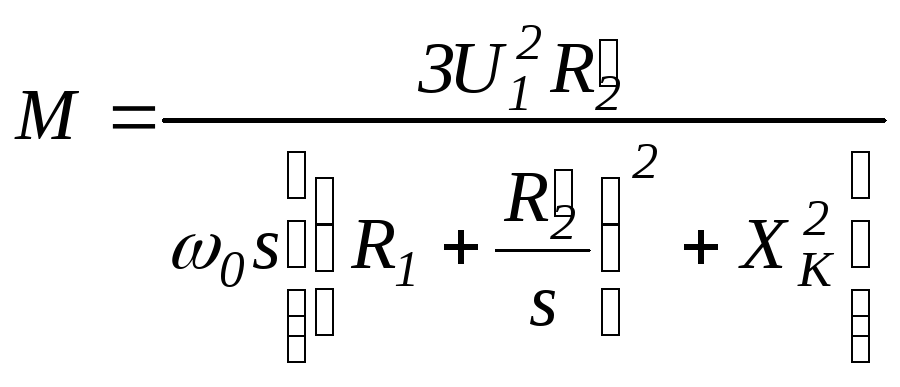 (13.4)
(13.4)
Максимальное значение момента М называется критическим моментом МКР, а скольжение для момента МКР называется критическим скольжением sKP.
Критическое скольжение определяется из условия максимума М:
![]() откуда
откуда
 (13.5)
(13.5)
В формуле (13.5) пренебрегли сопротивлением R1, так как оно мало в сравнении с ХК. После такого упрощения выражение (13.4) приводится к удобной при расчетах формуле Клосса
 ,
где
,
где
 (13.6)
(13.6)
Если считать, что
индуктивные сопротивления рассеяния
обмоток, входящие в ХК,
изменить
нельзя, то в соответствии с (13.5) и (13.6),
вращающим моментом М
можно управлять, изменяя величину U1
и частоту ω1
напряжения питания и сопротивление R'2
роторной цепи. Изменение только величины
напряжения питания U1
изменяет только критический момент UКР
пропорционально
![]() (13.6), а sKP
(13.5) не изменяется (рис.13.3а). Изменение
только
(13.6), а sKP
(13.5) не изменяется (рис.13.3а). Изменение
только
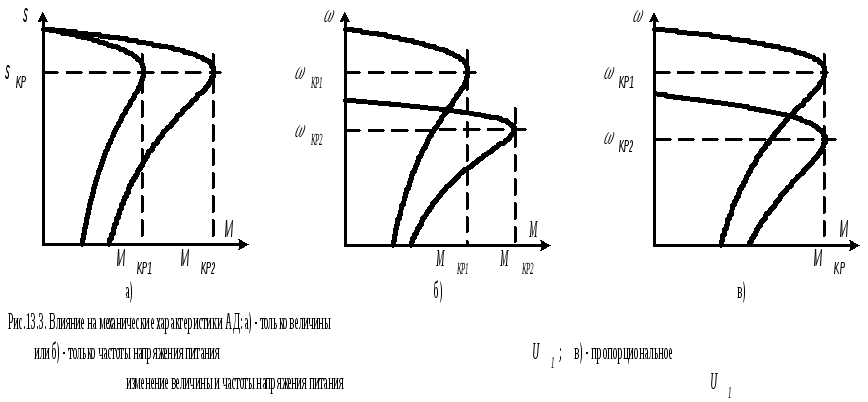 частоты
ω1=рП·ω0
питающего напряжения U1
изменяет (рис.13.3б) частоту
ω0
холостого хода АД прямо пропорционально
ω1,
критический момент МКР
(13.6) обратно пропорционально
частоты
ω1=рП·ω0
питающего напряжения U1
изменяет (рис.13.3б) частоту
ω0
холостого хода АД прямо пропорционально
ω1,
критический момент МКР
(13.6) обратно пропорционально
![]() и sKP
(13.5) обратно пропорционально ω1.
Пропорциональное изменение и величины
U1,
и частоты ω1
напряжения питания изменяет ω0
и критическое скольжение sKP
(13.5), а критический момент остается
неизменным, что следует из преобразований
выражения (13.6)
и sKP
(13.5) обратно пропорционально ω1.
Пропорциональное изменение и величины
U1,
и частоты ω1
напряжения питания изменяет ω0
и критическое скольжение sKP
(13.5), а критический момент остается
неизменным, что следует из преобразований
выражения (13.6)
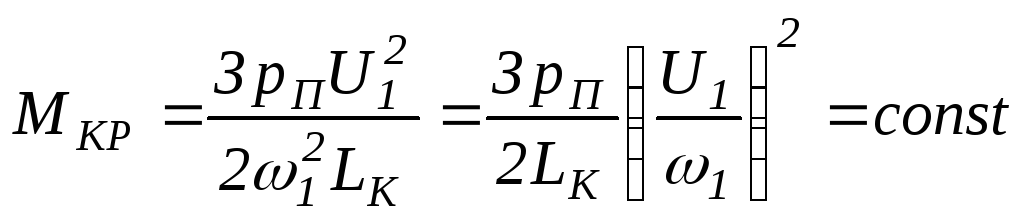 (13.7)
(13.7)
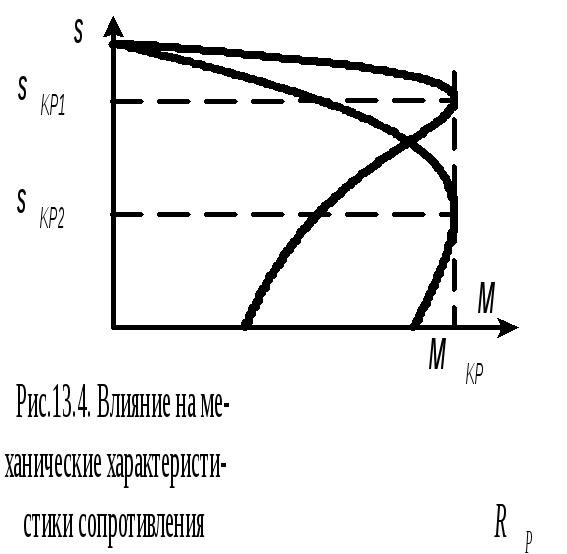
У АД с фазным
ротором в цепь ротора вводят активное
сопротивление RP,
в результате чего приведенное активное
сопротивление роторной цепи возрастает
от
![]() до величины
до величины
![]() .
Критическое скольжение sKP
прямо пропорционально активному
сопротивлению роторной цепи (13.5) и,
поэтому, sKP
увеличивается, а критический момент
МКР
не зависит от этого сопротивления и,
поэтому, МKP
(13.6) не изменяется (рис.13.4).
.
Критическое скольжение sKP
прямо пропорционально активному
сопротивлению роторной цепи (13.5) и,
поэтому, sKP
увеличивается, а критический момент
МКР
не зависит от этого сопротивления и,
поэтому, МKP
(13.6) не изменяется (рис.13.4).