

23. Дифференциальные уравнения обмоток ад в осях u-V. Выражения вращающего момента
Для вывода дифференциальные уравнения обмоток АД в осях u-v общих для статора и ротора в качестве исходной возьмем систему уравнений (21.4) в раздельных осях α-β и d-q. К уравнениям статора в осях α-β применим преобразования (22.4), а к уравнениям ротора в осях d-q – преобразования (22.7).
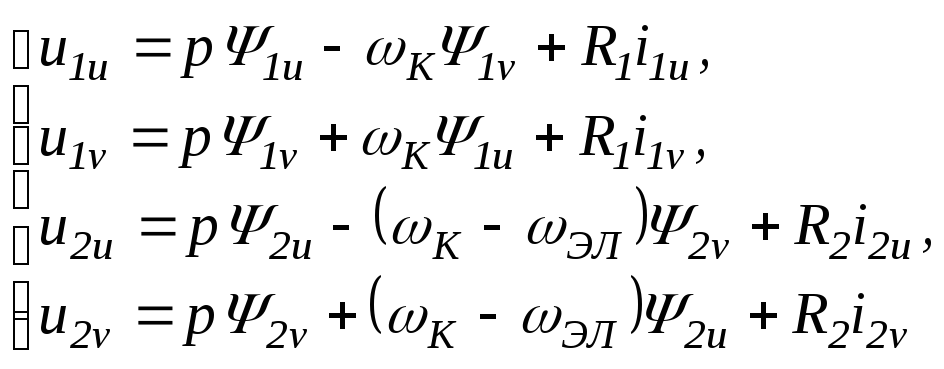
Уравнения статора согласно (21.4)
![]() (23.1)
(23.1)
а формулы преобразования координат (Ψ, u и i) согласно (22.4)
 (23.2)
(23.2)
Подставляем (23.2) в (23.1) и преобразуем

![]() (23.3)
(23.3)
Далее используем
известный из курса математики факт, что
если при произвольном значении φК
выражение
![]() то оба коэффициента А
и В
равны нулю. Выражения (23.3) имеют как раз
такой вид и, поэтому,
то оба коэффициента А
и В
равны нулю. Выражения (23.3) имеют как раз
такой вид и, поэтому,
![]() (23.4)
(23.4)
Аналогичные преобразования можно выполнить для уравнений ротора. В итоге будет получена система дифференциальных уравнений АД в осях u-v
 (23.5)
(23.5)
Каждое из уравнений содержит в правой части по 3 слагаемых:
- слагаемое вида рΨ является э.д.с., индуктируемой обмотками, которые соосны с рассматриваемой обмоткой;
- слагаемое вида ωΨ является э.д.с. вращения, индуктируемой обмотками, которые перпендикулярны к рассматриваемой обмотке;
- слагаемое вида Ri является падением напряжения на активном сопротивлении обмотки.
В систему (23.5) входят 8 переменных-функций: 4 тока и 4 потокосцепления. Для ее решения и моделирования по ней необходимо учитывать также определения потокосцеплений (22.1). Подставив (22.1) в (23.5), получим систему уравнений АД, содержащую только токи,
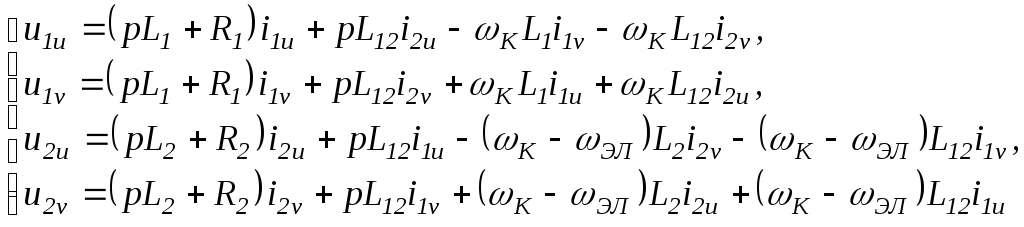 (23.6)
(23.6)
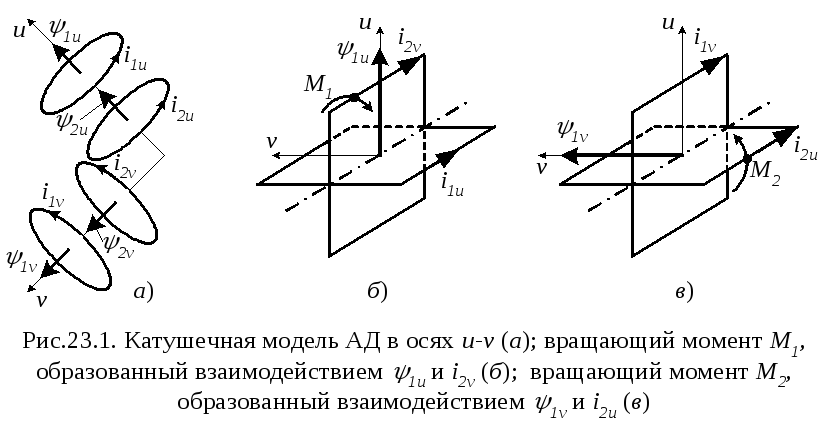
Вращающий момент АД, приложенный к ротору, является результатом взаимодействия токов i2v и i2u ротора с потокосцеплениями статора Ψ1u и Ψ1v (рис.23.1). Направления моментов М1 и М2 определено по правилу левой руки, а их величина пропорциональна произведению потокосцепления и тока. Если за положительный момент принять момент, вращающий ротор против часовой стрелки, то результирующий момент согласно рис.23.1б,в, будет пропорционален Ψ1v·i2u - Ψ1u·i2v:
M=M2 - M1 ~ (Ψ1vi2u- Ψ1ui2v) (23.7)
Приведем несколько эквивалентных формул вращающего момента:
![]()
или ![]() (23.8)
(23.8)
или ![]()
24. Уравнения и структурная схема ад в осях α-β, общих для статора и ротора. Расчеты токов обмоток
Уравнения АД в осях α-β, общих для статора и ротора, получаются из системы (23.7) с подстановкой в неё значения частоты вращения ωК=0 осей координат α-β и заменой индексов α←u и β←v:
 (24.1)
(24.1)
Уравнения цепи статора в осях α-β имеют естественный вид, совпадающий с уравнением статора системы (21.4), а уравнения цепи ротора входит частота ωЭЛ и его вид отличается от уравнений ротора в осях d-q (21.4).
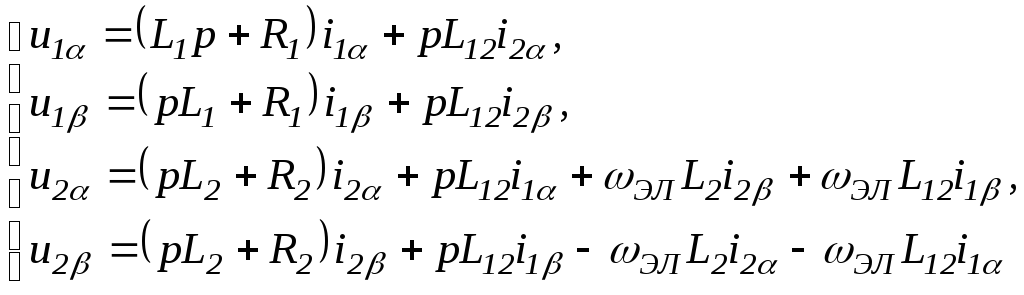
Преобразуем систему (24.1) к виду
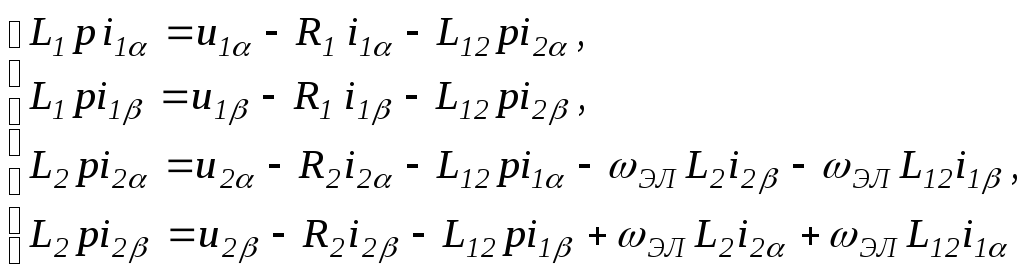 (24.2)
(24.2)
Для АД с короткозамкнутым ротором нужно принять u2α=0 и u2β=0.
Выражение вращающего момента АД берем согласно (23.8) вида
![]() (24.3)
(24.3)
Уравнение механики и связь между ωЭЛ и ω имеют вид
![]() (24.4)
(24.4)
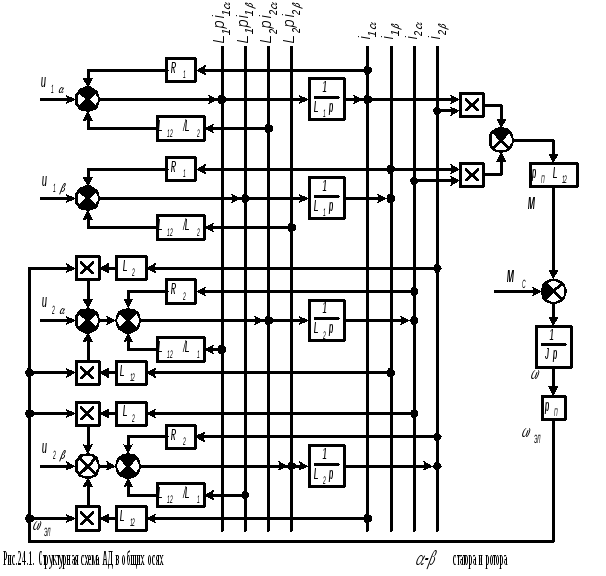
По (24.2), (24.3) и (24.4) построена на рис.24.1 структурная схема. Структурная схема может быть смоделирована на операционных усилителях и аналоговых перемножителях.
Из системы уравнений (24.1) или из аналоговой модели при известных входных сигналах-аргументах u1α, u1β, u2α, u2β и МС могут быть найдены все токи i1α, i1β, i2α, i2β, вращающий момент М и частота вращения ω АД. Напряжения u1α, u1β, u2α и u2β изменяются по гармоническому закону с частотой сети ω1, поэтому с частотой сети ω1 изменяются и токи i1α, i1β, i2α и i2β. Токи i1α и i1β являются реальными токами двухфазной обмотки статора в осях α-β, а токи i2α и i2β являются фиктивными токами двухфазной обмотки ротора в осях α-β, так как физическими осями ротора являются оси d-q и, соответственно, реальными токами двухфазного ротора являются токи i2d и i2q. Токи i2α и i2β можно пересчитать в токи i2d и i2q по формулам координатных преобразований (22.7):
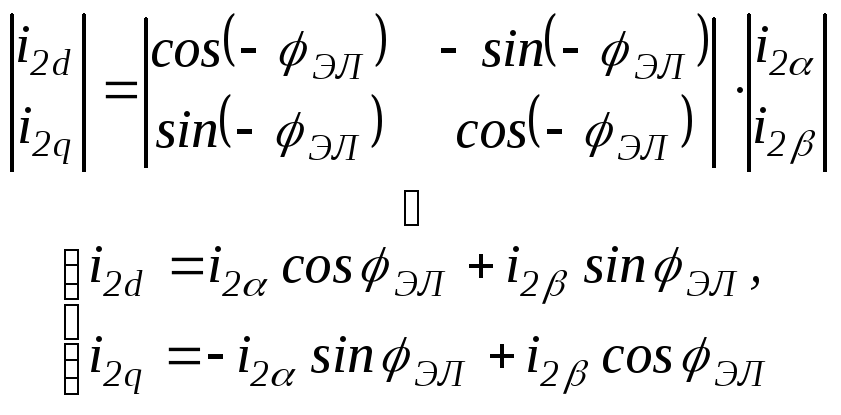 (24.5)
(24.5)
Пусть расчетом по системе (24.1) или моделированием по схеме рис.24.1 определены составляющие i2α=I2mcos(ω1t+φ10) и i2β= I2msin(ω1t+φ10) установившегося тока ротора. Частота вращения ротора равна ωЭЛ=(1-s)ω1, а его положение в пространстве осей α-β будет следующим φЭЛ=(1-s)ω1t+φЭЛ0.
С использованием формул (24.5) рассчитаем законы изменения токов i2d и i2q:
 (24.6)
(24.6)
 (24.7)
(24.7)
Составляющие i2d и i2q тока ротора I2 изменяются с частотой скольжения sω1, что соответствует действительности и доказывает правильность расчетов этих токов.