

Настройка на симметричный оптимум
Передаточная функция разомкнутой САУ ЭП имеет вид
![]() (2.10)
(2.10)
Переходный процесс замкнутой САУ ЭП (рис.2.2, график 2) имеет следующие динамические характеристики:
tp.со=3,1 Тμ, σсо=43 % (2.11)
АЭП является астатическим 2-го порядка (сомножитель р в знаменателе передаточной функции Wраз(р) имеет второй порядок), поэтому статическая и скоростная ошибки регулирования равны нулю.
Переходный процесс описывается формулой
 (2.12)
(2.12)
Расчеты по формуле (2.6) в случае использования силовой части с одной большой постоянной времени (2.5) дает ПИИ2-регулятор, а для силовой части, содержащей две большие постоянные времени (2.8) – дает ПИИ2Д-регулятор. Оба регулятора из-за И2-части обладают повышенным дрейфом выходного сигнала, а второй из-за Д-части чрезвычайно чувствителен к помехам.
3. Метод последовательной коррекции с подчиненным регулированием координат
Из расчетов, выполненных в предыдущем вопросе, видно, что с увеличением числа больших постоянных времени в передаточной функции Wдв(р) появляется Д-часть в регуляторе и возрастает порядок Д-части. Все это ведет к тому, что АЭП с таким регулятором будет чрезвычайно чувствительным к помехам. В условиях питания электродвигателей от вентильных (полупроводниковых) преобразователей, которые являются мощными источниками помех, можно утверждать, что с Д-частью АЭП будет неработоспособен.
Метод подчиненного регулирования координат основан на том, что с целью выведения из регуляторов Д-части в САУ ЭП вводятся более одного регулятора так, что контуры регулирования оказываются вложенными друг в друга. Внешний контур является основным, а остальные, внутренние по отношению к основному, называются подчиненными контурами.
Для введения подчиненного регулирования необходимо, чтобы в блоке, описанном передаточной функцией Wсч(р), допускалось физическое разбиение на компоненты, которым соответствовала передаточная функция вида
![]() , (3.1)
, (3.1)
в которой Т2, Т3, Т4,… - большие постоянные времени.
Рассмотрим двухконтурную САУ (рис.3.1) для АЭП с передаточной функцией
![]() (3.2)
(3.2)
Трехконтурная САУ ЭП будет рассмотрена в вопросе 12.
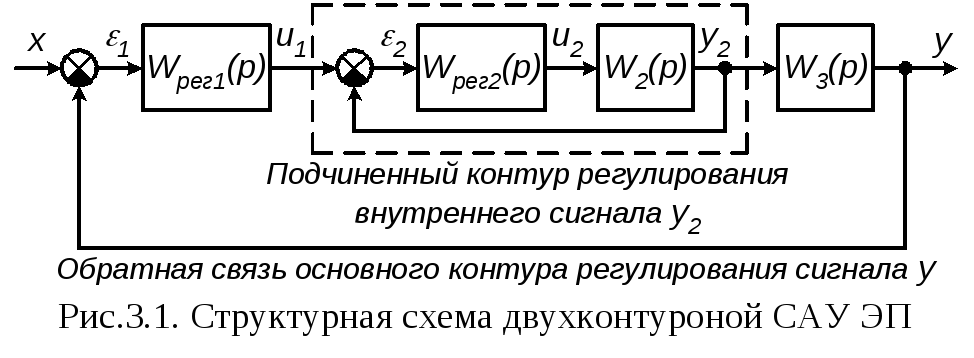
Порядок синтеза регуляторов следующий – сначала синтезируется регулятор Wрег2(р) внутреннего контура, а затем Wрег1(р) внешнего - основного. Для внутреннего контура всегда нужно принимать настройку на технический оптимум, а для внешнего – любую из настроек: либо технический оптимум, либо симметричный.
Синтез регулятора подчиненного контура
Примем желаемую передаточную функцию разомкнутого контура вида
![]() (3.3)
(3.3)
Тогда в соответствии с (2.6) рассчитываем
 (3.4)
(3.4)
Это ПИ-регулятор. Д-части в нем нет.
Замкнутый внутренний контур будет иметь передаточную функцию
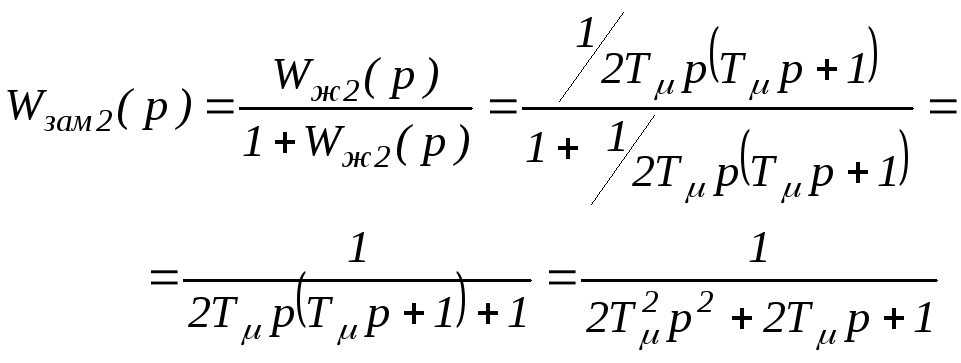 (3.5)
(3.5)
Структурная схема САУ ЭП примет вид рис.3.2.
П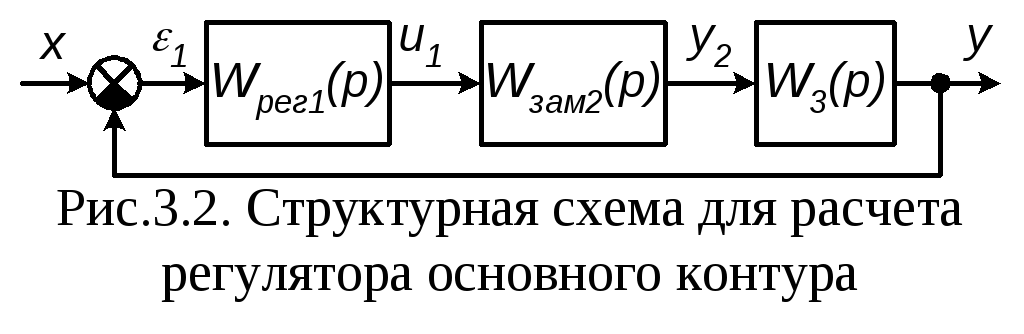 оказатели
качества для регулируемого сигнала у2
имеют значения
оказатели
качества для регулируемого сигнала у2
имеют значения
tp2=4,7 Тμ, σ2=4,3 %, (3.6)
а статическая ошибка регулирования равна нулю.
Синтез регулятора основного контура
Упростим передаточную
функцию Wзам2(р)
замкнутого подчиненного контура,
отбросив в ней слагаемое
![]() с малым коэффициентом
с малым коэффициентом
![]() из-за малости в нем Тμ
из-за малости в нем Тμ
![]() , (3.7)
, (3.7)
где Тμ1 – малая постоянная времени для основного контура, которая вдвое больше малой постоянной времени Тμ подчиненного контура.
Примем желаемую передаточную функцию разомкнутого контура вида
![]() (3.8)
(3.8)
В соответствии с (2.6) рассчитываем
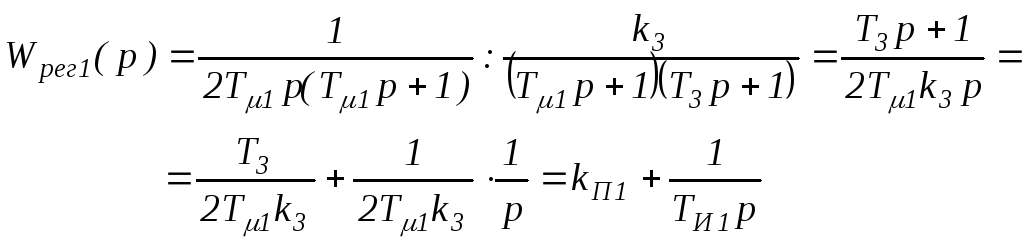 (3.9)
(3.9)
Это ПИ-регулятор. Д-части в нем нет.
Динамические показатели качества для регулируемого сигнала у имеют значения
tp=4,7 Тμ1=9,4 Тμ , σ1=4,3 %, (3.10)
а статическая ошибка регулирования равна нулю.
Теперь нужно обосновать допустимость упрощения (3.7). Обоснование следующее: если рассчитать в синтезированной САУ переходный процесс для сигнала у, используя сначала точное значение Wзам2(р) (3.5), а затем приближенное (3.7), то окажется, что различие в показателях качества tp и σ1 обоих переходных процессов не превысит 5%. Такая погрешность вполне допустима в инженерных расчетах, и, поэтому, упрощение (3.7) обосновано.
Аналогичные расчеты нужно выполнить в случае настройки основного контура на симметричный оптимум, используя в качестве желаемой передаточной функции разомкнутого контура выражение (2.10).
Выводы по расчетам подчиненного регулирования:
1. Элементы разомкнутой цепи, содержащей источник питания и двигатель, должны быть такими, чтобы допускалось их разбиение на такие физические блоки, чтобы передаточная функция имела вид (3.1).
2. Рассчитывается сначала регулятор подчиненного контура, а затем основного.
3. Подчиненный контур может быть настроен только на технический оптимум, а основной – на любой оптимум.
4. При переходе от подчиненного контура к основному применить упрощение (3.7).
5. Подчиненный контур самый быстродействующий (3.6). Быстродействие основного контура вдвое ниже (3.10).