

18. Импульсное регулирование частоты вращения ад с фазным ротором
И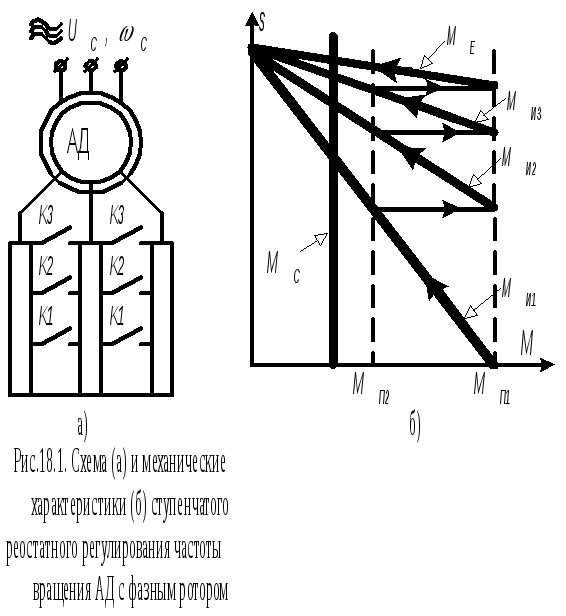 значально
АД с фазным ротором предназначались
для их использования в изображенной на
рис.18.1 схеме регулирования частоты
вращения.
значально
АД с фазным ротором предназначались
для их использования в изображенной на
рис.18.1 схеме регулирования частоты
вращения.
При включении АД в сеть двигатель работает на 1-й искусственной характеристике МИ1. Последовательным замыканием контактов К1, К2 и К3 двигатель последовательно проходит искусственные механические характеристики МИ2 и МИ3 и выходит на естественную характеристику МЕ.
Недостатки схемы:
- частота вращения АД регулируется ступенчато;
- искусственные механические характеристики АД слишком мягкие;
- имеются большие потери мощности в регулировочных реостатах.
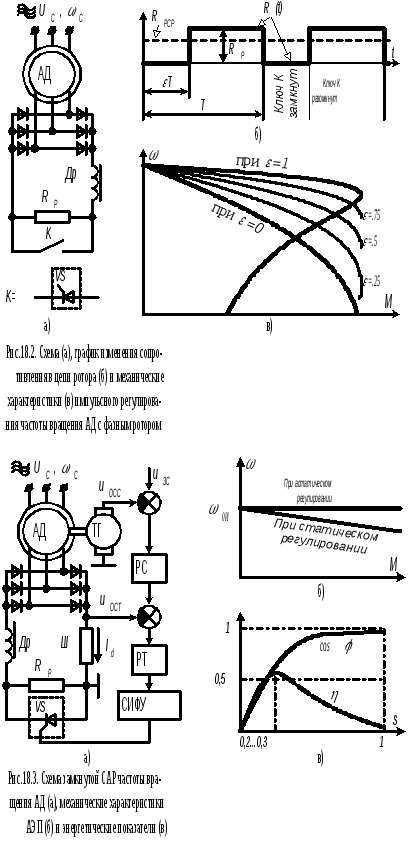
Обеспечить плавность регулирования можно, применив импульсное регулирование величины сопротивления в роторной цепи АД (рис.18.2). Повысить жесткость механических характеристик можно, применив замкнутую схему регулирования частоты вращения АД (рис.18.3). Минимизировать потери мощности в регулировочных элементах можно, применив асинхронно-вентильный каскад (тема 19).
В цепь ротора АД через выпрямительный мост и сглаживающий дроссель Др включено активное сопротивление RР, которое шунтируется ключом К (рис.18.2а). Для обеспечения большой частоты коммутации (включения/выключения) ключ К выполняется на основе транзистора или тиристора.
В результате работы ключа сопротивление, на которое замыкаются обмотки ротора, принимает за период Т два значения: 0 и RР (рис.18.2б). Если ε - относительная продолжительность замкнутого состояния ключа К, то среднее за период значение сопротивления в роторной цепи составит
![]() (18.1)
(18.1)
Значение ε можно изменять непрерывно, управляя длительностью замкнутого состояния ключа К, и, следовательно, можно непрерывно изменять сопротивление RРСР в цепи ротора. Механические характеристики АД (рис.18.2в) плавно переходят одна в другую от пусковой характеристики (ключ К постоянно разомкнут и ε=0) до естественной (ключ К постоянно замкнут и ε=1).
Замкнутая САР частоты вращения АД (рис.18.3) с подчиненным контуром тока позволяет сформировать механические характеристики с требуемой жесткостью, в том числе и абсолютно жесткие, если применить регулятор, содержащий И-часть. САР частоты вращения можно также настроить на технический или симметричный оптимумы с наперед заданными показателями качества (см. тему 2).
Коэффициент
полезного действия η
низкий из-за больших тепловых потерь
мощности
![]() в сопротивлении RP
в те моменты времени, когда ключ К
разомкнут. Зависимость коэффициента
полезного действия η
от скольжения s
приведена на рис.18.3в.
в сопротивлении RP
в те моменты времени, когда ключ К
разомкнут. Зависимость коэффициента
полезного действия η
от скольжения s
приведена на рис.18.3в.
19. Сар частоты вращения ад с фазным ротором на базе асинхронно-вентильного каскада (авк)
В регулировочных режимах в сопротивлении RP (рис.18.3) выделятся тепло. Мощность тепловыделений равна произведению напряжения URP на сопротивлении RP и тока IRP через него. Эту мощность можно с помощью инвертора напряжения преобразовать в мощность переменного тока и отдать (рекуперировать) ее в сеть. Наиболее простое решение рекуперации энергии достигается на ведомом сетью инверторе напряжения.
Схема асинхронно-вентильного каскада (АВК) содержит (рис.19.1) АД, в цепи фазного ротора которого имеется неуправляемый выпрямитель, и ведомый сетью инвертор напряжения на базе управляемого выпрямителя.
К инвертору от
выпрямителя ВКД
(вентильного комплекта двигателя)
подведена э.д.с., пропорциональная
скольжению s
АД. Угол опережения β
инвертора выбирается таким, чтобы между
напряжениями ВКД
и ВКИ
соблюдалось соотношение
![]() .
Инвертор, состоящий из вентильного
комплекта ВКИ
и согласующего трансформатора Тр,
потребляет мощность постоянного тока
.
Инвертор, состоящий из вентильного
комплекта ВКИ
и согласующего трансформатора Тр,
потребляет мощность постоянного тока
![]() и эта мощность, но уже на переменном
токе, подведена к нижним (по схеме)
обмоткам трехфазного трансформатора
и затем трансформируется в обмотки,
подсоединенные к сети. Таким образом,
мощность цепи ротора АД, которая в схемах
на рис.18.2 и рис.18.3 рассеивалась в виде
тепловой мощности в регулировочном
резисторе RР,
в схеме АВК отдается в сеть. К.п.д. АВК
во всем диапазоне частот вращения АД
поддерживается на максимально достижимом
уровне – порядка 0,75…0,85.
и эта мощность, но уже на переменном
токе, подведена к нижним (по схеме)
обмоткам трехфазного трансформатора
и затем трансформируется в обмотки,
подсоединенные к сети. Таким образом,
мощность цепи ротора АД, которая в схемах
на рис.18.2 и рис.18.3 рассеивалась в виде
тепловой мощности в регулировочном
резисторе RР,
в схеме АВК отдается в сеть. К.п.д. АВК
во всем диапазоне частот вращения АД
поддерживается на максимально достижимом
уровне – порядка 0,75…0,85.
САР частоты вращения АД на базе АВК может быть вполне удовлетворительным даже, если она выполнена по схеме разомкнутого типа, так как механические характеристики схемы АВК близки к характеристикам частотного управления, приведенными на рис.13.3в, что доказывается ниже.
У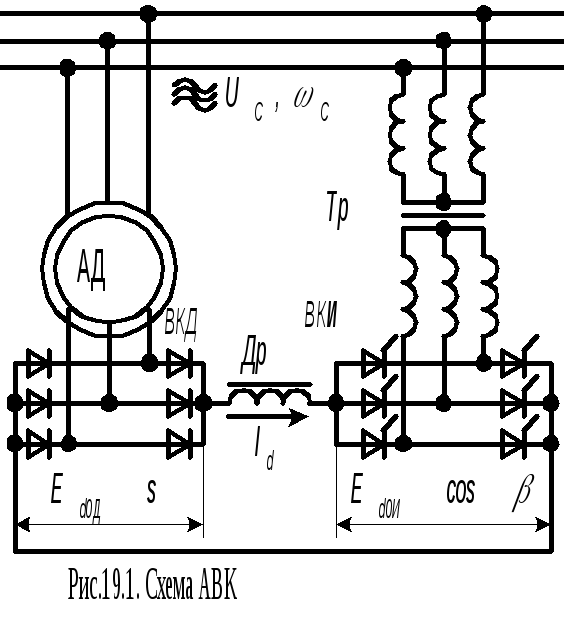 АД, не используемого в АВК, существует
только одно значение скольжения холостого
хода на естественной характеристике
sXXе=0,
при котором вращающий момент АД нулевой.
У АД, используемого в АВК, на искусственных
механических характеристиках существует
бесконечно много значений скольжения
холостого хода sXXβ,
при котором вращающий момент АД нулевой,
и эти скольжения зависят от угла
опережения β
инвертора. Действительно, вращающий
момент М
АД обращается в ноль, если во всех его
роторных обмотках токи нулевые и,
следовательно, нулевой ток Id
(рис.19.1). Ток Id
согласно рис.19.1 равен
АД, не используемого в АВК, существует
только одно значение скольжения холостого
хода на естественной характеристике
sXXе=0,
при котором вращающий момент АД нулевой.
У АД, используемого в АВК, на искусственных
механических характеристиках существует
бесконечно много значений скольжения
холостого хода sXXβ,
при котором вращающий момент АД нулевой,
и эти скольжения зависят от угла
опережения β
инвертора. Действительно, вращающий
момент М
АД обращается в ноль, если во всех его
роторных обмотках токи нулевые и,
следовательно, нулевой ток Id
(рис.19.1). Ток Id
согласно рис.19.1 равен
![]() (19.1)
(19.1)
где RЭ – эквивалентное сопротивление цепи протекания тока Id.
Ток Id обращается в ноль согласно (19.1) при скольжении
![]() (19.2)
(19.2)
Т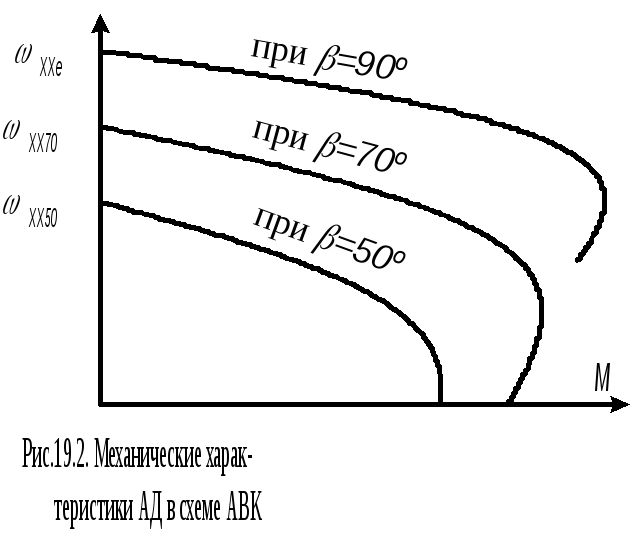 олько
при β=90О
скольжение sXXβ=0
и совпадает с sXXе=0
для АД без АВК.
олько
при β=90О
скольжение sXXβ=0
и совпадает с sXXе=0
для АД без АВК.
Жесткость искусственных механических характеристик, как показывают расчеты, уменьшается при увеличении скольжения sXXβ. Зная скольжения sXXβ холостого хода естественной или искусственных механических характеристик, можно рассчитать частоты вращения холостого ωХХ хода для этих характеристик по формуле
![]() (19.3)
(19.3)
где ω0 - частота вращения магнитного поля статора.
Механические
характеристики АД, включенного в схему
АВК, приведены на рис.19.2. Из них следует,
что для повышения частоты вращения АД
в схеме разомкнутого типа нужно увеличить
угол опережения β.
С увеличением β
значение входного напряжения инвертора
![]() уменьшится и при неизменном значении
выходного напряжения
уменьшится и при неизменном значении
выходного напряжения
![]() ВКД
ток Id
согласно (19.1) увеличится, увеличится
далее вращающий момент двигателя и
частота вращения будет возрастать.
Значение напряжение на кольцах ротора
и, следовательно,
ВКД
ток Id
согласно (19.1) увеличится, увеличится
далее вращающий момент двигателя и
частота вращения будет возрастать.
Значение напряжение на кольцах ротора
и, следовательно,
![]() будут уменьшаться.
будут уменьшаться.
Д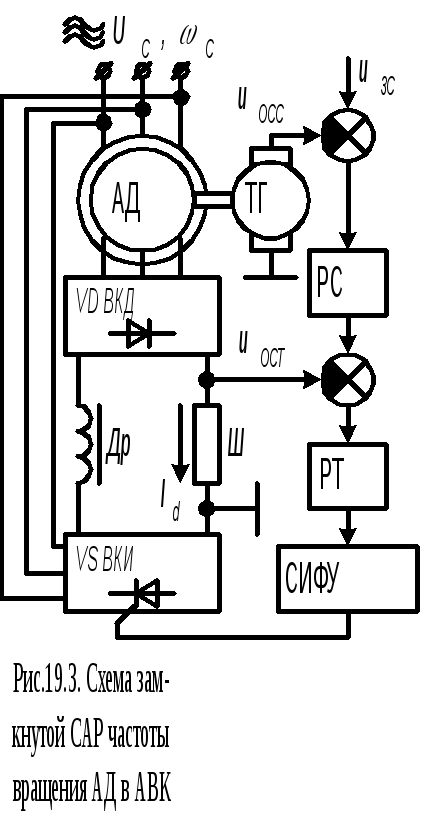 ля
уменьшения частоты вращения угол β
нужно уменьшать, увеличив тем самым,
входное напряжение
ля
уменьшения частоты вращения угол β
нужно уменьшать, увеличив тем самым,
входное напряжение
![]() ВКИ.
Ток Id
уменьшится, уменьшится вращающий момент
М
и частота вращения АД будет понижаться.
ВКИ.
Ток Id
уменьшится, уменьшится вращающий момент
М
и частота вращения АД будет понижаться.
Более качественное регулирование частоты вращения АД с любой жесткостью механических характеристик АЭП и другими заданными показателями качества, например, показателями качества модального управления, может быть достигнуто при включении схемы АВК (рис.19.1) в контур регулирования скорости. Схема САР частоты вращения с использованием АВК приведена на рис.19.3. Она подобна схеме с рис.18.3 с тем отличием, что СИФУ управляет тиристорами вентильного комплекта ВКИ инвертора АВК.
Скалярные системы автоматического управления асинхронными двигателями базируются только на прямом учете параметров механических переходных процессов, но они не учитывают в полном объеме электрические и электромеханические процессы. Для мощных АД, имеющих значительную электрическую инерцию, а также для электроприводов, к динамическим процессам которых предъявляются высокие требования, сложно реализовать качественный АЭП без учета электрических переходных процессов. Такие требования могут быть учтены, если использовать полные дифференциальные уравнения обмоток АД, что реализовано в системах векторного управления АД.