

20. Обобщенная математическая модель ад в физических переменных
Конструктивными электрическими компонентами АД являются три обмотки статора и обмотки ротора, которые для АД с фазным ротором содержат также три обмотки, а для АД с короткозамкнутым ротором количество обмоток может составлять несколько десятков.
В уравнения электрического состояния обмоток АД, как электрической машины переменного тока, входят токи, напряжения и потокосцепления обмоток, значения которых являются функциями от частот их изменения ωЭЛ и мгновенных электрических фаз φЭЛ. В свою очередь, как в электрической машине с взаимно вращающимися обмотками, значения указанных фаз и частот зависят как от частоты и фазы сетевого напряжения, так и от механической частоты вращения ротора ωМЕХ и его положения в пространстве φМЕХ. Несмотря на то, что между электрическими и механическими частотами и фазами существует несложные связи вида ωЭЛ=рПωМЕХ и φЭЛ=рПφМЕХ, где рП – число пар полюсов обмоток статора, целесообразно при составлении уравнений электрического состояния обмоток АД принять рП=1. В этом случае электрические и механические частоты и фазы будут совпадать ωЭЛ=ωМЕХ и φЭЛ=φМЕХ, и это позволит при составлении указанных уравнений избежать громоздких фраз типа: "в то время как ротор повернулся на угол φМЕХ, электрическая фаза φЭЛ изменилась на угол рПφМЕХ" и т.п. Таким образом, далее будем считать, что механические параметры ωМЕХ и φМЕХ вращения ротора будут совпадать с "электрическими параметрами ωЭЛ и φЭЛ вращения ротора". Последние просто вычисляются через электрические параметры статора ω1, φ1 и ω2, φ2 ротора по формулам ωЭЛ=ω1-ω2 и φЭЛ=φ1-φ2. И только при расчетах вращающих моментов будем учитывать истинное значение рП.
Составим уравнения электрического состояния обмоток АД с фазным ротором. Описание короткозамкнутого многообмоточного ротора нет смысла рассматривать, так как в математической модели АД и ротор, и статор удобно представлять в виде двух обмоток (см. тему 21).
Оси обмоток статора и ротора вращаются друг относительно друга с частотой ωЭЛ, а между осями одноименных обмоток статора и ротора существует геометрический угол, который в силу принятого рП=1 равен электрической фазе φЭЛ= ωЭЛt+φЭЛ0 .
Катушечная модель АД приведена на рис.20.1. Обмотки статора имеют индекс 1, ротора – 2. Потокосцепление каждой из шести обмоток имеет шесть составляющих. Рис.20.1 иллюстрирует способ формирования потокосцепления Ψ1А фазы А статора. Потокосцепление Ψ1А определяется суммой
![]() (20.1)
(20.1)
где Ψ1А1А – составляющая потокосцепления Ψ1А, созданная током i1А фазы 1А;
Ψ1А1В – составляющая потокосцепления Ψ1А, созданная током i1В фазы 1В;
и т.д.
Вычисляем составляющие потокосцепления Ψ1А через токи катушек
 (20.2)
(20.2)
где L1 – собственная индуктивность катушки фазы статора;
L11 – взаимная индуктивность катушек статора;
L12 – взаимная индуктивность между катушками статора и ротора при совпадении осей этих катушек.
П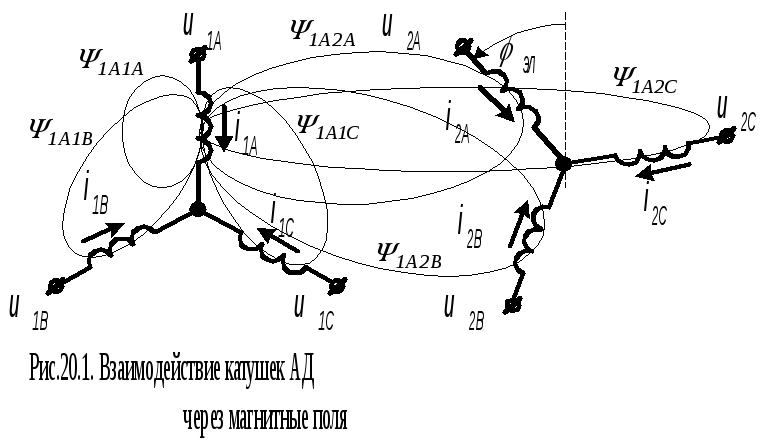 олные
потокосцепления всех других катушек
определяются по формулам подобным
(20.2).
олные
потокосцепления всех других катушек
определяются по формулам подобным
(20.2).
Выражение (20.2)
является нелинейным из-за того, что в
4-м, 5-м и 6-м слагаемых содержатся
произведения переменных – токов обмоток
ротора i2
и тригонометрических функций от угла
φЭЛ.
Если оси взаимодействующих катушек
совпадают (при φЭЛ=nπ
совпадают оси катушек фаз 1А
и 2А,
оси катушек фаз 1А
и 2В
совпадают
при
![]() ,
а при
,
а при
![]() совпадают оси катушек фаз 1А
и 2С),
то магнитная связь между катушками
максимальная. Если оси взаимодействующих
катушек перпендикулярны (при
совпадают оси катушек фаз 1А
и 2С),
то магнитная связь между катушками
максимальная. Если оси взаимодействующих
катушек перпендикулярны (при
![]() перпендикулярны оси катушек фаз 1А
и 2А,
при
перпендикулярны оси катушек фаз 1А
и 2А,
при
![]() перпендикулярны оси катушек фаз 1А
и 2В
и при
перпендикулярны оси катушек фаз 1А
и 2В
и при
![]() перпендикулярны оси катушек фаз 1А
и 2С),
то между катушками магнитная связь
нулевая.
перпендикулярны оси катушек фаз 1А
и 2С),
то между катушками магнитная связь
нулевая.
При известных полных потокосцеплениях всех обмоток и известных активных сопротивлениях обмоток статора R1 и ротора R2 система дифференциальных уравнений обмоток АД имеет вид
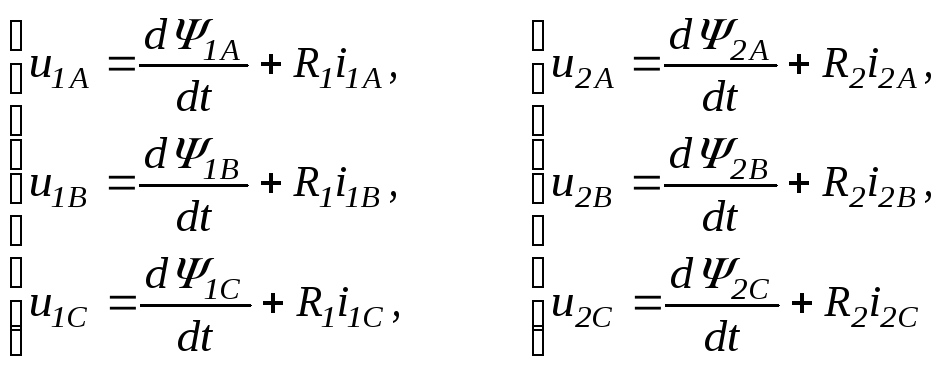 (20.3)
(20.3)
Эта система уравнений является нелинейной, так как в нее входят нелинейные выражения полных потокосцеплений катушек фаз статора и ротора.
Если описывать АД с короткозамкнутым ротором, то число уравнений ротора возрастает до нескольких десятков.
Недостатки математической модели АД в физических переменных:
1) минимальное число дифференциальных уравнений равно шести (20.3);
2) выражения полных потокосцеплений каждой обмотки содержат минимум по шесть слагаемых (20.2);
3) система дифференциальных уравнений (20.3) нелинейная.
Из-за этих недостатков невозможно решить аналитически систему уравнений (20.3) с тем, чтобы найти токи и потокосцепления обмоток при заданных фазных напряжениях обмоток. Значит, даже задача анализа переходных процессов в АД не решаема, а синтез – тем более не возможен.