

29. Блоки восстановления потокосцепления ротора и тригонометрического анализатора
Блок восстановления потокосцепления ротора БВПР
На вход блока поступают сигналы потокосцеплений Ψμα и Ψμβ зазора в осях α-β. На выходе должны быть сформированы сигналы потокосцеплений Ψ2α и Ψ2β ротора в осях α-β.
Выведем формулы преобразования (Ψ2α, Ψ2β) ← (Ψμα, Ψμβ), по которым работает БВПР. Вывод выполним только для оси α, для оси β формулы будут подобными по структуре.
Потокосцепления Ψ2α и Ψμα по оси α определяются выражениями
 (29.1)
(29.1)
В системе (29.1) содержится две переменные-функции: Ψ2α и i2α. Решаем систему (29.1) относительно Ψ2α:
![]() (29.2)
(29.2)
Для потокосцепления Ψ2β формула имеет вид
![]() (29.3)
(29.3)
Формулы содержат только линейные вычислительные операции.
Блок тригонометрического анализатора ТА
Н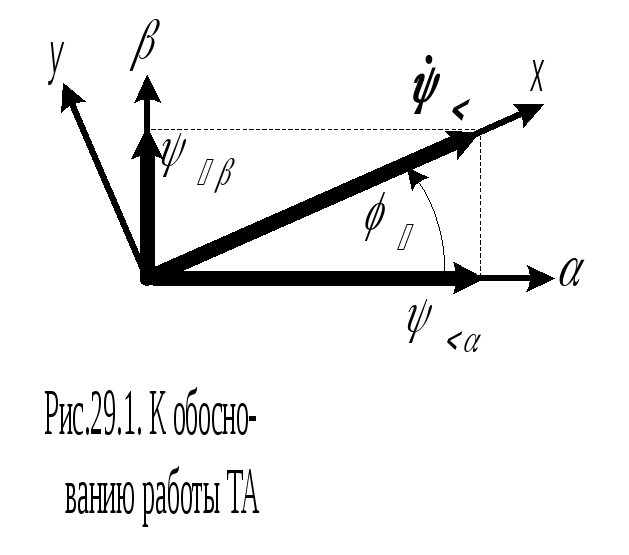 а
вход блока поступают составляющие Ψ2α
и Ψ2β
по осям α
и β
потокосцепления Ψ2
ротора. ТА
обеспечивает вычисление модуля Ψ2
потокосцепления ротора и его положение
в пространстве осей α-β,
определяемое углом φ1
между вектором Ψ2
и осью α.
Так как для преобразователей координат
ПК1
и ПК2
требуется (см. рис.27.2 и тему 30) не сам
угол φ1,
а значения тригонометрических функций
от него, то на выходе ТА
формируются сигналы sinφ1
и cosφ1.
а
вход блока поступают составляющие Ψ2α
и Ψ2β
по осям α
и β
потокосцепления Ψ2
ротора. ТА
обеспечивает вычисление модуля Ψ2
потокосцепления ротора и его положение
в пространстве осей α-β,
определяемое углом φ1
между вектором Ψ2
и осью α.
Так как для преобразователей координат
ПК1
и ПК2
требуется (см. рис.27.2 и тему 30) не сам
угол φ1,
а значения тригонометрических функций
от него, то на выходе ТА
формируются сигналы sinφ1
и cosφ1.
Расположение
вектора
![]() и его проекций относительно осей α-β
и х-у
показано на рис.29.1. Согласно рис.29.1
имеем:
и его проекций относительно осей α-β
и х-у
показано на рис.29.1. Согласно рис.29.1
имеем:
![]() (29.4)
(29.4)
Формулы являются нелинейными. Целесообразно вычисления по ним проводить по программе с использованием микропроцессорного устройства.
30. Блоки преобразования координат и блок компенсации. Подсистема ввода информации
Блоки преобразования координат
Блоки преобразования координат осуществляют взаимные переходы между сигналами различных двухфазных обмоток АД в осях х-у и α-β.
Преобразователь ПК1 осуществляет переход для напряжений задания от системы х-у к системе α-β.
Формулы пересчета (22.4), в которых нужно принять φК=φ1, и произвести замену индексов (х-у) ← (u-v):
 (30.1)
(30.1)
Инвариантность мощностей при работе преобразователя координат ПК1 выполняется, что доказывается вычислениями:
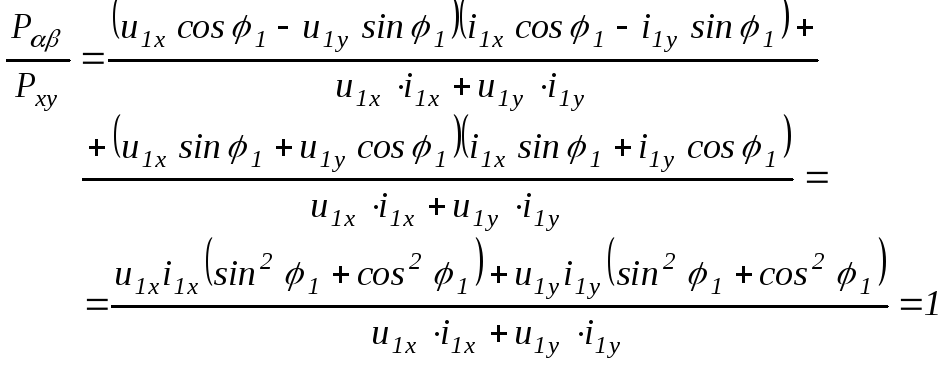 (30.2)
(30.2)
П реобразователь
ПК2
осуществляет переход для токов от
системы α-β
к системе х-у.
реобразователь
ПК2
осуществляет переход для токов от
системы α-β
к системе х-у.
Формулы пересчета (22.3), в которых нужно принять φК=φ1, и произвести замену индексов (х-у) ← (u-v):
 (30.2)
(30.2)
Инвариантность мощностей при работе преобразователя координат ПК2 также выполняется.
Блок компенсации
Назначением блока компенсации БК является нейтрализация внутренней обратной связи в АД, представленном в осях х-у (рис.26.1).
Блок компенсации (рис.30.1) представляет собой программу (из-за нелинейных вычислений, осуществляемых БК, вычисления целесообразно проводить по программе микропроцессорного устройства), которая обрабатывает поступающие на вход блока сигналы ωЭЛ и i1y. Обрабатываются эти сигналы точно так же, как во внутренней обратной связи. Выходной сигнал БК вычитается из сигналам u1х. Так как одинаковые выходные сигналы БК и внутренней ОС входят в линию сигнала u1х с противоположными знаками, то они друг друга компенсируют.
Структурная схема АД в осях х-у с учетом блока компенсации превратится в структуру (рис.30.2), на которой цепь возбуждения и силовая цепь раздельные, как в ДПТ.
П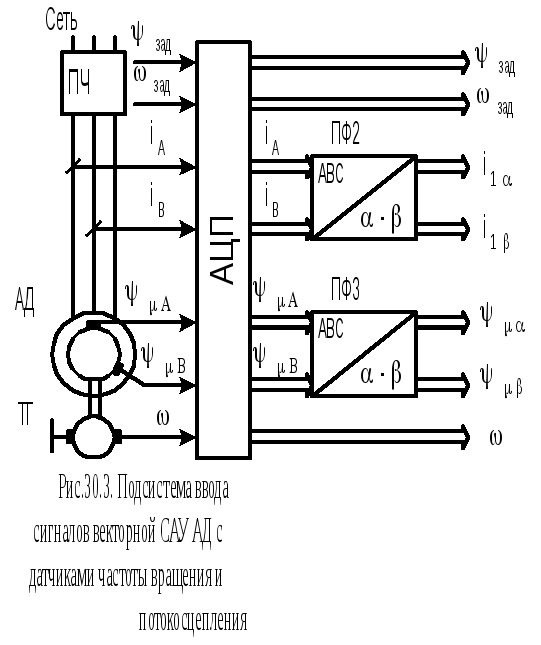 одсистема
ввода информации
одсистема
ввода информации
В результате рассмотрения принципов действия блоков АЭП АД с векторным управлением установлено, что в блоке тригонометрического анализатора, блоках преобразователей координат и блоке компенсации выполняются нелинейные вычисления. Это предопределяет использование в АЭП АД с векторным управлением микропроцессорных вычислительных устройств.
Ориентация на микропроцессорные устройства предопределяет перевод всех входных сигналов с помощью АЦП в цифровую форму (рис.30.3).