

5. Проектирование системы автоматического управления
5.1 Разработка математической модели автоматизированного электропривода
При создании математической модели трехфазного асинхронного электродвигателя целесообразно принять следующие допущения, позволяющие в доступной математической форме выразить соотношения основных параметров и координат электродвигателя:
намагничивающие силы обмоток двигателя распределены синусоидально вдоль окружности воздушного зазора;
потери в стали статора и ротора отсутствуют;
обмотки статора и ротора строго симметричны со сдвигом обмоток на 120 градусов;
насыщение магнитной цепи отсутствует.
Уравнения равновесия напряжений для обмоток трех фаз статора имеют вид:
 (5.1)
(5.1)
соответственно для трех фаз ротора:
 (5.2)
(5.2)
где U1a, U1b, U1c, U’2f, U’2b, U’2c – мгновенные значения фазных напряжений статора и ротора;
i1a, i1b, i1c, i’2f, i’2b, i’2c – мгновенные значения фазных токов статора и ротора;
1a, 1b, 1c, 2a, 2b, 2c – полные потокосцепления фазных обмоток;
R1, R’2 – активные сопротивления обмоток статора и ротора;
При математическом описании трехфазных асинхронных электродвигателей удобно оперировать не мгновенными значениями координат, а их результирующими векторами. Если, например, мгновенные значения токов равны ia, ib, ic, то результирующий вектор тока определяется уравнением:
 ,
(5.3)
,
(5.3)
где
 .
.
Аналогично определяется результирующие векторы напряжения
 ,
,
и потокосцепления
 .
.
Используя выражения результирующих векторов, уравнения (5.1)-(5.2) можно записать в виде одного дифференциального уравнения в векторной форме. Для этого уравнение из (5.1) умножается на 2/3а0, второе на 2/3а, третье на 2/3а2. Суммируя полученные произведения, получим:

 ,
,
или в векторной форме
 .
(5.4)
.
(5.4)
Аналогично векторное уравнение напряжений ротора:
 .
(5.5)
.
(5.5)
В уравнениях (5.4) и (5.5) векторы записаны соответственно в системах координат статора и ротора. Для совместного решения уравнений их необходимо привести к одной системе координат.
При исследовании переходных процессов в асинхронном электродвигателе, управляемом частотой и напряжением статора, удобно использовать систему координат, вращающуюся со скоростью вращения магнитного поля 0’, приведенной к числу пар полюсов, равному единице (приведенной к двухполюсному электродвигателю). Предполагается при этом справедливым равенство:
0’=1=2f1,
где f1 – частота напряжения статора, Гц;
1 – угловая частота напряжения статора, рад/с.
Для рассматриваемой координатной системы можно записать:
 (5.6)
(5.6)
где S – скольжение электродвигателя:
 ,
,
(0=0’/p – угловая скорость вращения магнитного поля или синхронная скорость электродвигателя).
Потокосцепления связаны с током через индуктивности
 (5.7)
(5.7)
Для определения электромагнитного момента двигателя используется векторное произведение 1i1, тогда
 ,
(5.8)
,
(5.8)
или векторное произведение 2i’2, тогда
 .
(5.9)
.
(5.9)
Учитывая (5.7) можно записать (5.8) и (5.9) в виде:
 ,
(5.10)
,
(5.10)
 (5.11)
(5.11)
Вторые равенства в уравнениях (5.10), (5.11) справедливы потому, что векторное произведение двух одинаково направленных векторов равно нулю.
Для полного описания переходных процессов в асинхронном электродвигателе к уравнениям напряжений добавим уравнение записанное для скалярных значений моментов М и Мс.
 ,
(5.12)
,
(5.12)
Полученная система уравнений электродвигателя является нелинейной, ее решение для различных динамических режимов возможно с использованием вычислительной техники. Вместе с тем при синтезе систем управления асинхронным электродвигателем целесообразно располагать простыми и наглядными динамическими моделями электродвигателя в виде передаточных функций или структурных схем. Такая возможность появляется, если рассматривать переходные процессы в отклонениях относительно начальных координат электродвигателя. Представим результирующие векторы в виде проекций на комплексной плоскости и запишем их через вещественные и мнимые части в следующем виде:

 (5.13)
(5.13)
Совместив вектор напряжения статора с действительной осью координатной системы, т.е. положив U1=0. На основании (5.6) получим:
 ,
(5.14)
,
(5.14)
 ,
(5.15)
,
(5.15)
 ,
(5.16)
,
(5.16)
 .
(5.17)
.
(5.17)
Выразим также электромагнитный момент по уравнения (5.8) через составляющие векторов тока и потокосцепления:

и применив правило векторного произведения векторов, получим абсолютное значение момента
 ,
,
 ;
;
 .
.
Воспользовавшись выражением (5.9), можно аналогично получить:
 ,
,
 ;
;
 .
.
Составляющие тока ротора могут быть выражены через составляющие потокосцепления в следующем виде:
 ,
(5.18)
,
(5.18)
где k1 – коэффициент электромагнитной связи статора,
 ,
(5.20)
,
(5.20)
 ,
(5.21)
,
(5.21)
где L1, L’2 – полные эквивалентные индуктивности фаз статора и ротора;
L1, L2 – индуктивности от полей рассеяния;
Lm – индуктивность главного потока;
Lm=3/2*L12,
где L12 – максимальная взаимная индуктивность между любой обмоткой статора и обмоткой ротора, которая имеет место при соединении их осей.
С учетом (5.7) и (5.19) можно выражения моментов записать в форме, удобной для вывода передаточных функций двигателя:

Или
 .
.
В случае одновременного изменения частоты и напряжения статора, при котором потокосцепление статора остается постоянным, из уравнений (5.13) и (5.14) можно получить
 ;
1=0.
(5.21)
;
1=0.
(5.21)
Для двигателя с короткозамкнутым ротом в уравнениях (5.15) и (5.16) U’2=U’2=0. Выразив из уравнения (5.18) 2 и 2 и подставив их в уравнения (67), (68), получим:
 ,
(5.22)
,
(5.22)
 ,
(5.23)
,
(5.23)
 .
(5.24)
.
(5.24)
Рассматривая переменные величины в приращениях относительно начальных значений i’2=I’2+i’2, i’2=I’2+i’2, 1=1+1, =+, S=S+S, M=Mнач+M, получим из (5.21)–(5.24) уравнения для астатического режима, связывающие начальные значения координат,
 ,
(5.25)
,
(5.25)
 ,
(5.26)
,
(5.26)
 ,
(5.27)
,
(5.27)
 ,
(5.28)
,
(5.28)
и уравнения для динамического режима, связывающие приращения координат:
 ,
(5.29)
,
(5.29)
 ,
(5.30)
,
(5.30)
 ,
(5.31)
,
(5.31)
где Тэл=L’’2/R’2 – электромагнитная постоянная времени электродвигателя;
Sk=R’2/(L’’2*1) – критическое скольжение.
На основании (5.25)-(5.31) можно записать передаточную функцию:
 .
(5.32)
.
(5.32)
Выражение
 в
первом слагаемом числителя (5.32)
представляет собой значение фиктивного
пускового момента Мпф,
определяемое в результате линеаризации
рабочей части механической характиристики
двигателя для принятых значений
напряжения статора U1
и угловой частоты статора 1:
в
первом слагаемом числителя (5.32)
представляет собой значение фиктивного
пускового момента Мпф,
определяемое в результате линеаризации
рабочей части механической характиристики
двигателя для принятых значений
напряжения статора U1
и угловой частоты статора 1:
 ,
(5.33)
,
(5.33)
где
 –критический
момент двигателя.
–критический
момент двигателя.
Момент Мнач во втором слагаемом числителя (84) можно записать с учетом принятых допущений в виде:
 .
(5.34)
.
(5.34)
С учетом (5.33) и (5.34) выражение (5.32) примет следующий вид:
 .
(5.35)
.
(5.35)
Для рабочей части механической характеристики можно принять (S/Sk)2<<1 и тогда передаточную функцию (5.37) можно записать в упрощенном виде:
 .
.
Представив зависимость скольжения электродвигателя от угловой частоты напряжения статора в приращениях, и выполнив линеаризацию при условии, что в рабочей области S<<1, получим:
 .
(5.36)
.
(5.36)
Уравнение равновесия моментов (5.12) может быть записано в приращениях в виде:
 .
(5.37)
.
(5.37)
На основании полученных выражений может быть составлена структурная схема асинхронного двигателя при управлении угловой частотой напряжения статора и при условии постоянства потокосцепления статора. Однако это удобнее сделать, если представить базовые значения координат двигателя в о.е., приняв за базовые значения координат их значения в номинальном режиме: Мпфн, 1н., U1н, 0н=1н/pп, где 0н - асинхронная угловая скорость двигателя. Тогда (он)=, (11н)=1, (М/Мпфн)=М, (Мс/Мпфн)=Мс, (U1/U1н)=U1. Передаточная функция (5.35) с учетом (5.36) запишется:
 ,
(5.38)
,
(5.38)
где =U1/U1н – относительное напряжение статора;
=1/1н – относительная частота напряжения статора.
Или в упрощенном виде:
 .
(5.39)
.
(5.39)
Соответственно на основании уравнения (89) имеем
 ,
(5.40)
,
(5.40)
где Тм=J*oн/Мпфн – механическая постоянная времени.
Упрощенная структурная схема асинхронного двигателя при управлении угловой частотой напряжения статора, построенная на основании выражений (5.39), (5.40), показана на рисунке 5.1.
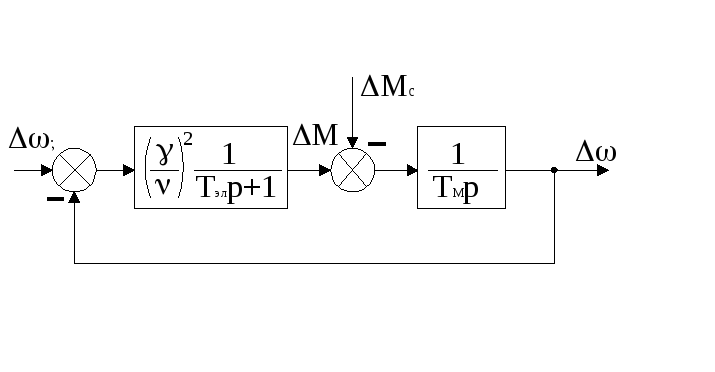
Рисунок 5.1- Структурная схема асинхронного двигателя
Момент на валу двигателя, приводящего сушильный барабан во вращение, меняется по закону, изображенному на рисунке 5.2.
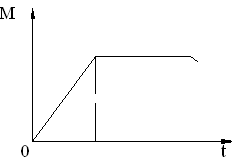
Рисунок 5.2 - Зависимость момента на валу двигателя сушильного барабана от времени
T – время достижения моментом установившегося значения.
Время Т обусловлено скоростью заполнения сушильного барабана каменными материалами.
Закон изменения момента можно описать следующей зависимостью:
 ,
(5.41)
,
(5.41)
где =Т/3 – постоянная времени данного динамического звена;
k=М/ – коэффициент, определяющий зависимость момента от скорости.
Температура каменных материалов при прохождении через сушильный барабан меняется по следующему закону, изображенному на рисунке 5.3.
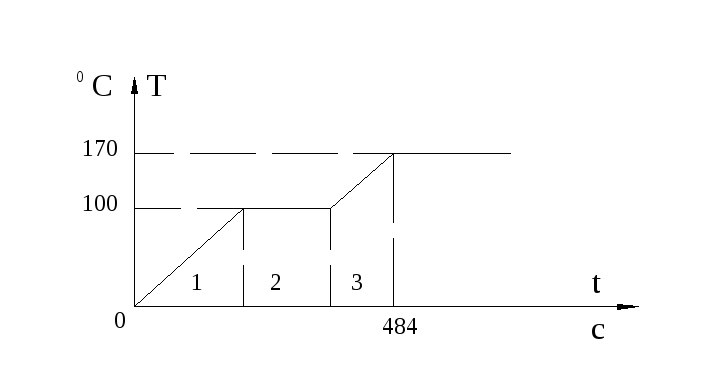
Рисунок 5.3 - Закон изменения температуры каменных материалов
Интервал 1 обусловлен тем, что происходит нагрев каменного материала от температуры окружающей среды до температура 1000С.
На интервале 2 происходит испарение влаги, находящейся в материале.
На интервале 3 происходит нагрев каменных материалов от температуры 100С до заданной (в подавляющем большинстве случаев до температуры 170С).
Таким образом, мы можем получить информацию о температуре материала спустя 484 секунды с момента его поступления в сушильный барабан. Такой процесс можно описать звеном с передаточной функцией:
 .
.