

5.2 Расчет параметров объекта управления
Рассчитаем величину времени достижения моментом установившегося значения исходя из условия заполнения барабана материалами.
Определим площадь поперечного сечения барабана:
 ,
,
где d b=1,7 м – диаметр барабана.
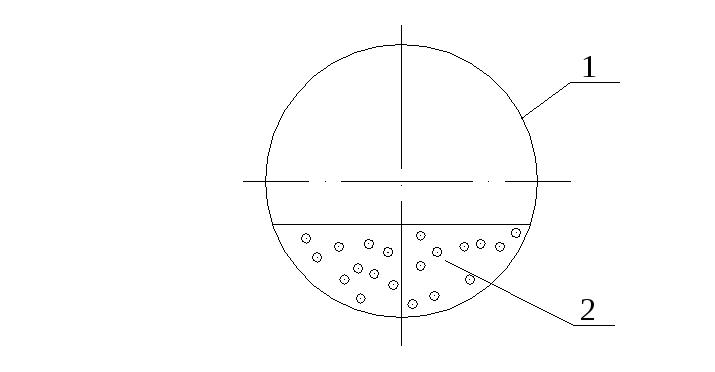
Рисунок 5.4 - Сушильный барабан
1-корпус сушильного барабана; 2-каменные материалы.
Известно, что сушильный барабан при максимальной производительности асфальтобетонной установки заполняется каменными материалами на 1/3. Тогда площадь поперечного сечения просушиваемых материалов в барабане
 .
.
С учетом производительности установки максимальная скорость прохождения материалов через барабан:
 .
.
Время похождения материала через барабан:
 ,
,
где lb=6 м – длина сушильного барабана.
5.3 Определение структуры и параметров управляющего устройства
В рассматриваемой нами системе стабилизации температуры каменных материалов объект управления инерционен, поэтому на его фоне преобразователь и электродвигатель можно считать безынерционными. Однако должно выполнятся условие ограничения ускорения на допустимом уровне. Таким образом, заменяем преобразователь, и двигатель фиктивным апериодическим звеном первого порядка с постоянной времени, равной времени разгона электродвигателя от нулевой до номинальной скорости, то есть Тф=6,9 с. Структурная расчетная схема системы автоматической стабилизации температуры каменных материалов представлена на рис. 5.5.
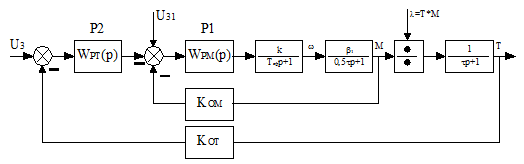
Рисунок 5.5 - Структурная схема системы стабилизации температуры
Как видно из рисунка система построена по принципу подчиненного регулирования. В системе предусмотрены два контура регулирования: момента и температуры со своими регуляторами соответственно.
Система управления содержит нелинейный блок деления. Единых методов расчета таких систем нет и мы линеаризуем данную систему заменяя блок деления на блок разности и переходя от величины к их приращениям.
 ,
,
где Z0=X0/Y0.
 .
.
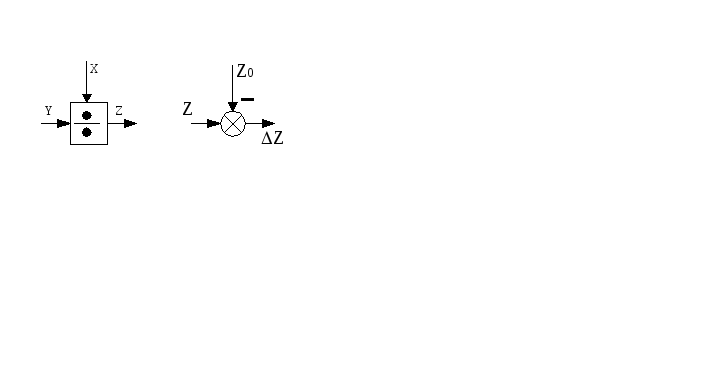
Рисунок 5.6 - Линеаризация блока деления
Обозначим 1=x/y0=const и 2=x0/y02 которое находится из начальных условий. Линеаризованная структурная схема представлена на рисунке 5.7.

Рисунок 5.7 - Линеализированная система управления
Перенесем отрицательный знак момента влево. Получим структурную конечную схему.
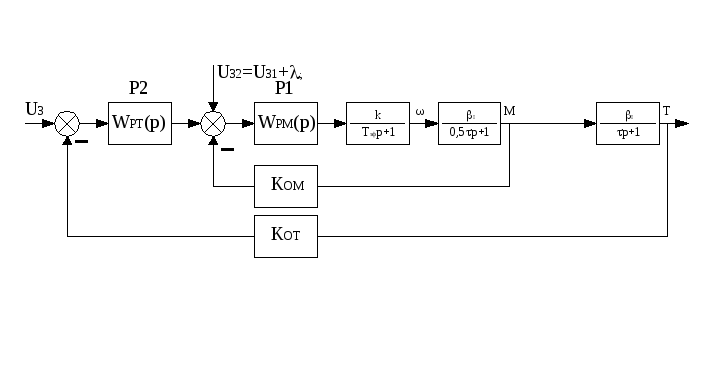
Рисунок 5.8 - Структурная схема системы управления стабилизацией температуры
Синтезируем регулятор в контуре момента. На рисунке 5.9 показана структурная схема контура регулирования момента.

Рисунок 5.9 - Контур регулирования момента
Регулятор момента используем ПИ. Настройку регулятора будем осуществлять на оптимум по модулю (технический оптимум).
Запишем операторное уравнение контура:
 .
.
Передаточная функция:
 .
.
Условия настройки системы на модульный оптимум:
 ,
(5.42)
,
(5.42)
тогда:
 .
.
Окончательно имеем:
 .
.
Передаточная функция ПИ-регулятора момента примет вид:
 .
.
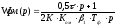
Синтезируем регулятор в контуре регулирования температуры. Применим ПИ-регулятор, настроенный на модульный оптимум. Структурная схема контура регулирования температуры представлена на рисунке 5.10.
Рисунок 5.10 - Контур регулирования температуры
Запишем передаточное уравнение контура:
 .
.
C учетом передаточной функции контура регулирования момента передаточную функцию контура регулирования температуры можно записать в виде:
 .
.
В соответствии с условием настройки на модульный оптимум:
 .
.
Таким образом, постоянная времени:
 .
.
Передаточная функция примет вид:
 .
.
В соответствии со структурной схемой на рисунке 5.8. Рассчитаем значения коэффициентов передачи системы. Электродвигатель привода сушильного барабана имеет мощность Рном=11 кВт и номинальную угловую скорость ном=152,8 рад/с. Номинальный момент
Мном=Рном/ном=11000/152,8=72 Нм.
 ;
;
 ;
;
 ;
;
 .
.
Коэффициенты обратных связей по моменту и температуре соответственно:
 ;
;
 .
.
Постоянные времени:
 ;
;
 ;
;
 ;
;
 ;
;
 с.
с.