

-
Анализ качества управления су.
По полученному переходному процессу определяем следующие показатели качества управления СУ.
1.7.1 Установившееся значение
По графику hуст![]() 16.7
16.7
![]()
-
Время регулирования
tp=9.8 c
-
Перерегулирование
![]()
![]()
-
Декремент затухания
![]()
h2=28.7
![]()
-
Время достижения первого максимума
tmax=0.4 c.
-
Время нарастания
tн=0.2 c
-
Число колебаний за время регулирования.
n=12.
-
Период колебаний
T=0.79 c.
Заключение: с учетом этих показателей можно сделать вывод, что качество управления СУ очень плохое и требует дополнительной коррекции, так как перерегулирование и время регулирования слишком большие, а декремент затухания не достаточно велик. Коррекцию производят путем введения в СУ дополнительных звеньев или при помощи изменения параметров уже присутствующих в СУ звеньев.
2. Анализ нелинейной СУ
2.1. Построение по заданной структурной схеме су ее фазового портрета..
Для построения фазового портрета упростим структурную схему нелинейной СУ. Для этого сгруппируем все линейные звенья системы и нелинейные.
x(p)
y(p)
W1(p)
W5(p)
W2(p)
W3(p)
W4(p)
W6(p)
W7(p)
НЭ























Схема 2.1.1.
Разомкнем систему перед нелинейным элементом, перенося на новый вход системы регулирующее воздействие. Получим следующую структурную схему:
y(p)


W1(p)
W3(p)
W4(p)
W5(p)
-W6(p)
НЭ
W7(p)
W2(p)
















С хема
2.1.2.
хема
2.1.2.
W5(p)W7(p)W1(p)



W4(p)
W3(p)
-W6(p)
НЭ
W2(p)














Схема 2.1.3.
[W5(p)W7(p)W1(p)-W6(p)]W3(p)W4(p)W2(p)
НЭ








Схема 2.1.4.
u
u-X
Xi
F(ε)
X

W(p)







Схема 2.1.5.
Получаем передаточную функцию линейной части.
W(p)=[W5(p)W7(p)W1(p)-W6(p)]W3(p)W4(p)W2(p)
![]()
Упростим передаточную функцию:
Вынесем в числителе за скобки 7,4·106, а в знаменателе 2,5·103.
Далее пренебрегая всеми значениями меньшими 10-3 порядка, получим следующее выражение для передаточной функции:
![]()
Теперь в избавимся от многочлена
числители, для этого умножим числитель
и знаменатель на
![]() :
:

Вследствие чего имеем следующее выражение для передаточной функции:
![]()
Преобразуем:
![]()
Окончательное выражение для передаточной функции:
![]()
По определению передаточной функции.
![]()
Следовательно:
p(0.08p+1)X=236.8Xi
p(0.08p+1)X=236.8F(u-X)
Будем считать, что на вход системы
подано постоянное воздействие
![]() ,
тогда перейдем от самих величин к их
отклонениям относительно постоянного
входного воздействия. Введем обозначения.
,
тогда перейдем от самих величин к их
отклонениям относительно постоянного
входного воздействия. Введем обозначения.
С учетом этого получим следующую систему уравнений.


Разделив уравнение (1) на (2) и исключив таким образом время, получим дифференциальное уравнение фазовых траекторий:
![]()
Решение данного уравнения будет строиться исходя из заданной нелинейности. В данном случае нелинейной частью системы является трехпозиционное реле (статическая характеристика задана преподавателем).
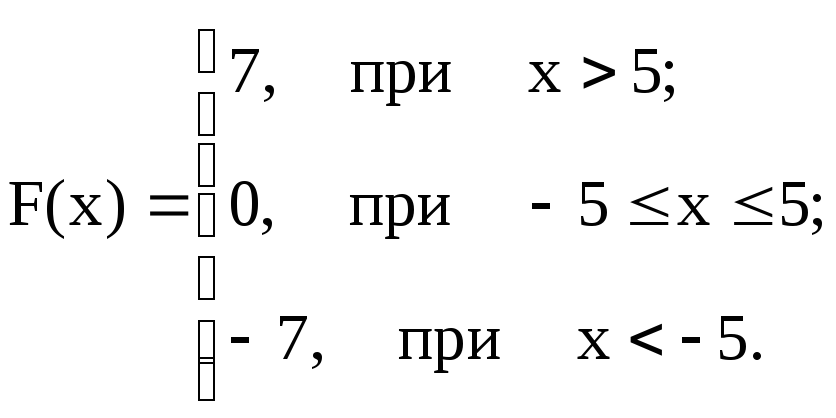 (3)
(3)
В соответствии с системой (3) запишем уравнение, с учетом того, что функция является нечетной, т.е. симметрична относительно начала координат:
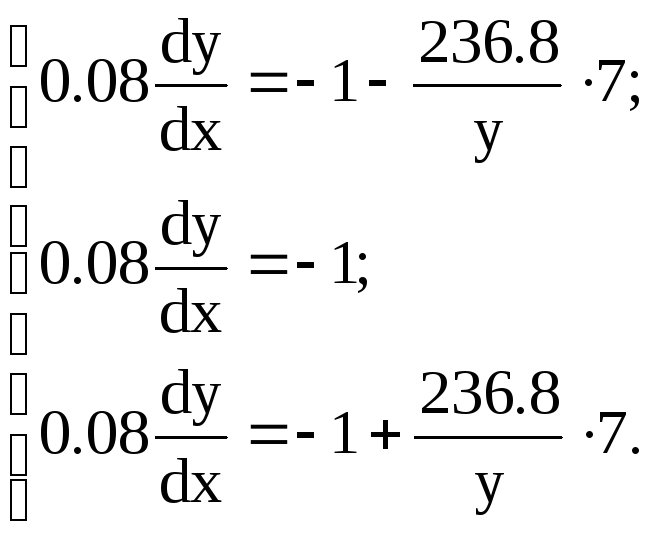
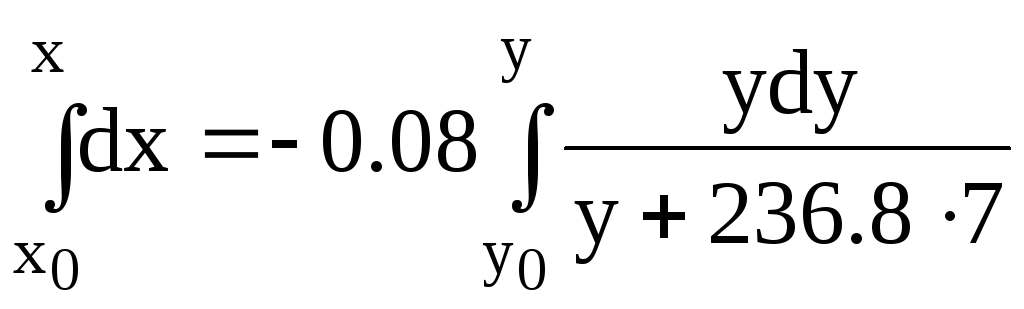
Пусть в начальный момент времени система выведена в точку М0 с координатами (х0, у0). Проинтегрируем вышеприведенное выражение от х0 до х и от у0 до у.
Найдем решение каждого из уравнений системы по очереди:
1)
![]() .
.
Т.к. изначально система выведена в точку фазовой плоскости М0 с координатами (x0,y0) , то интегрирование будет: от x0 до x ; от y0 до y.
Найдем решение каждого уравнения:
1)
получим
![]()
2)
![]()
![]()
![]() - отрезок прямой для интервала
- отрезок прямой для интервала
![]()
3)
![]()
![]()
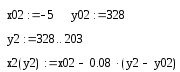
Задаваясь различными значениями "у" построим фазовый портрет системы. При этом выведем систему в произвольную точку (-8,0).
Первая прямая:
 при x>5
при x>5
Вторая прямая:
 при –5<x<5
при –5<x<5
Третья прямая:
 при x<5
при x<5
Четвертая прямая:
 при –5<x<5
при –5<x<5
Пятая прямая:
 при x>5
при x>5
Шестая прямая:
 при –5<x<5
при –5<x<5
Последнее уравнение при y=0 обращается в x=0.2, т.е. последняя составляющая графика пересекает ось y на отрезке -5 < x < 5. Закрутка происходит в начало координат.
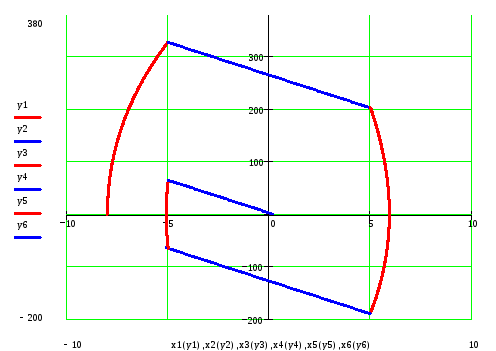
График 2.1. - фазовый портрет СУ.