

БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ФАКУЛЬТЕТ ИНЖЕНЕРНО-СТРОИТЕЛЬНЫЙ
КАФЕДРА УПРАВЛЕНИЯ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ
КУРСОВАЯ РАБОТА
по дисциплине
Теория автоматического управления
на тему
Исследование устойчивости линейных и нелинейных систем
автоматического управления
Пояснительная записка
Выполнил ст. гр. УИТ-42:
Лунин А. С.
Принял:
Мартынова И.В.
«_____» ___________2005
2005
СОДЕРЖАНИЕ
ВЫВОД 12
5 АНАЛИЗ СИСТЕМЫ С УЧЕТОМ НЕЛИНЕЙНОГО ЭЛЕМЕНТА 16
ЗАКЛЮЧЕНИЕ 21
ВВЕДЕНИЕ
Построение систем автоматического управления требует создания качественных регуляторов. Данная задача является первостепенной в любой САУ. Построение качественного регулятора требует создание такой системы, которая была бы устойчивой при некотором изменении внешних факторов и внутренних процессов.
В выполняемой курсовой работе предлагается исследовать линейную и нелинейную систему и ознакомится с влиянием нелинейных узлов на работу регулятора.
В ходе контрольной работы будет проведено упрощение системы, определена ее устойчивость и найдены основные характеристики качества управления. Данные операции будут проделаны для линейной и нелинейной САУ. Будет показано, как влияет введение в регулятор нелинейных узлов, и определен положительный (отрицательный фактор) данных узлов в системе. В ходе выполнения курсовой работы будет построен фазовый портрет, который является отражением работы нелинейной системы
1 ПОСТАНОВКА ЗАДАЧИ РАЗРАБОТКИ СИСТЕМЫ УПРАВЛЕНИЯ
Система автоматического регулирования давления, не имеет механического управления, в ней сравнивается заданное значение давления и текущее значение давления. Выявленная при этом ошибка должна быть пропорциональна изменению угла наклона заслонки. Если исполнительным элементом является гидродвигатель, то элементом сравнения заданного сигнала и сигнала обратной связи может служить мембранный измеритель давления. В этом случае при разности давления мембрана 2 прогибается в ту или иную сторону, шток закреплённый на мембране соединён со струйным усилителем 3 направляет струю рабочей жидкости от насоса в верхнюю часть гидравлического двигателя 4 или в нижнюю, соответственно начинает перемещаться поршень соединённый штоком с заслонкой 5, изменяя угол наклона . Вследствие изменения угла наклона заслонки доступ жидкости в камеру 1 соответственно увеличивается или уменьшается, и в камере устанавливается заданное давление. При отклонении давления от заданного цикл повторяется.
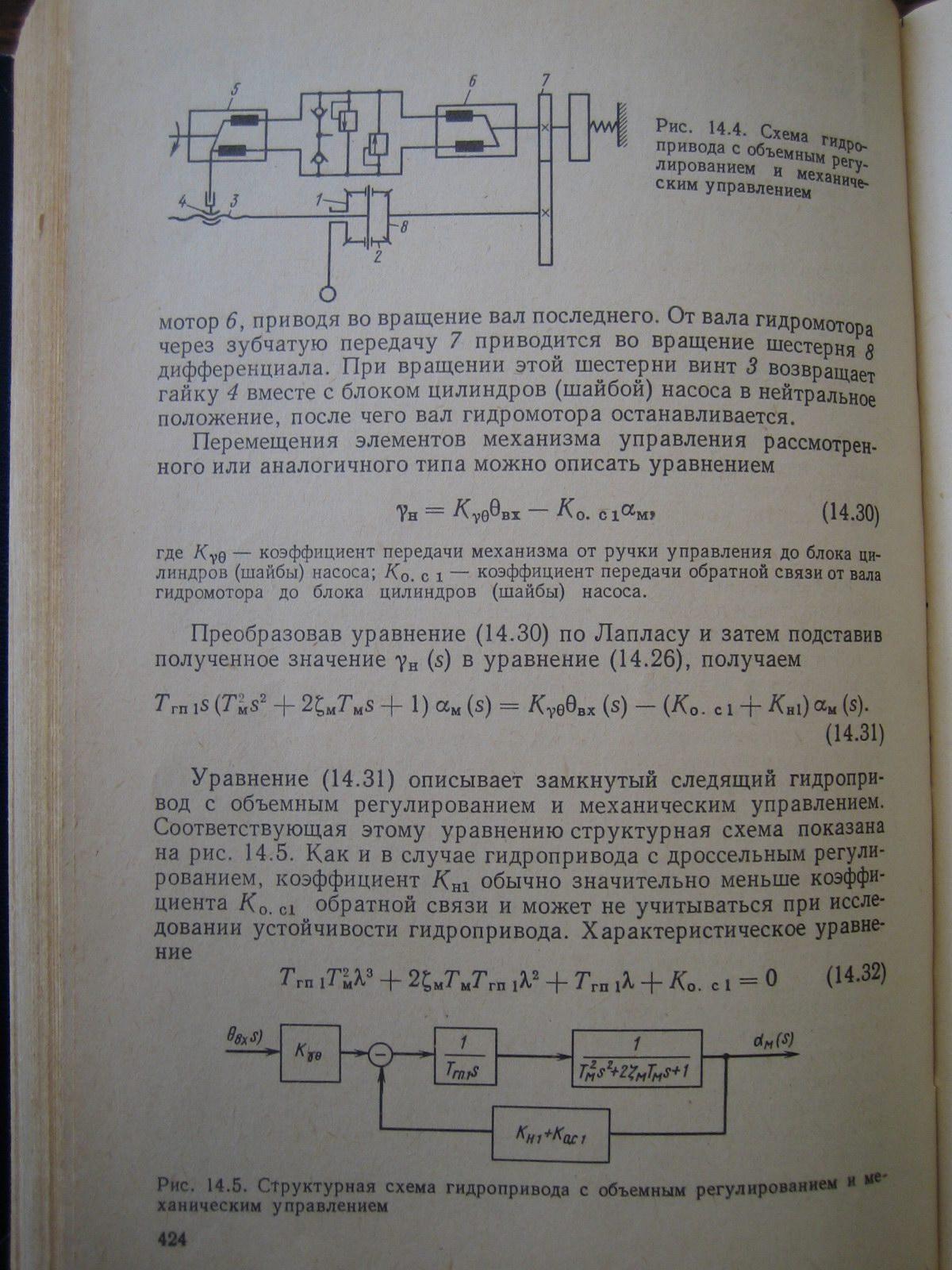
рисунок 1 –принципиальная схема САР давления
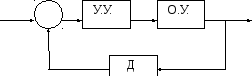
Составим функциональную схему САР давления, выделив при этом основные блоки, систем при этом примет вид рисунка 2.

 X(t)
U(t)
Y(t)
X(t)
U(t)
Y(t)
Рисунок 2 –функциональная схема САР давления
Опишем, какими механическими устройствами представлены основные звенья функциональной схемы система автоматического регулирования давления:
У.У.- струйный усилитель
О.У. – гидравлический двигатель
Д. – мембрана.
Определим входные и выходные сигналы функциональных элементов системы автоматического управления.
X(t) – входным сигналом системы является отклонение давления в камере от заданного. Этот сигнал поступает на У.У. и определяет какое количество жидкости должен перегнать насос в цилиндр гидравлического двигателя, из этого делаем вывод, что U(t) – количество жидкости выпущенное из насоса. Жидкость приводит поршень гидравлического двигателя в движение и следовательно Y(t) –выходной сигнал системы, получается угол поворота заслонки. На вход датчика поступает сигнал установившегося давления, который сравнивается с заданным сигналом (заданное давление). Сигнал с датчика поступает на вход струйного усилителя. На этом один круг регулирования системы автоматического регулирования давления заканчивается.
2 РАЗРАБОТКА СТРУКТУРЫ СИСТЕМЫ
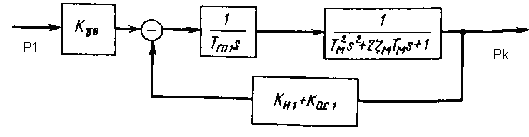
Воспользуемся структурной схемой системы автоматического регулирования давления из справочника Попова.
Структурная схема этой системы изображена на рисунке 3.
![]()
рисунок 3 –структурная схема САР давления
где К-коэффициент передачи от мембраны до струйного усилителя.
Кос1- коэффициент передачи от струйного усилителя до гидравлического двигателя.
Кн1 – коэффициент передачи гидравлического двигателя (из условия системы он обычно значительно меньше коэффициента Кос1 и при рассмотрении устойчивости системы может не учитываться)
![]() - передаточная
функция струйного
усилителя
- передаточная
функция струйного
усилителя
![]() -
передаточная функция гидравлического
двигателя
-
передаточная функция гидравлического
двигателя
2.1 Выбор передаточных функций элементов системы
Выбор коэффициентов звеньев структурной схемы ведем исходя из того, что система автоматического регулирования давления должна быть устойчива.
-
Выбор передаточной функции объекта управления.
В![]() ыберем
передаточную функцию гидравлического
двигателя равную:
ыберем
передаточную функцию гидравлического
двигателя равную:
-
Выберем передаточную функцию устройства управления
В![]() ыберем
передаточную функцию струйного усилителя
равную:
ыберем
передаточную функцию струйного усилителя
равную:
-
Выбор передаточной функции обратной связи
В![]() ыберем
коэффициент передачи обратной связи
равный 5.
ыберем
коэффициент передачи обратной связи
равный 5.
-
В
 ыберем
коэффициент передачи от гидравлического
двигателя до заслонки равный:
ыберем
коэффициент передачи от гидравлического
двигателя до заслонки равный:
3 РАСЧЕТ ХАРАКТЕРИСТИК СИСТЕМЫ
В структурную схему входят типовые динамические звенья, поэтому расчет устойчивости и качества регулирования нетрудно провести по переходным, амплитудно-частотным и логарифмическим характеристикам. Произведем расчет устойчивости САР давления. Для этого произведем вычисление общей передаточной функции системы (см. рисунок 3). Выражение будет иметь вид:
![]()
П![]()
 одставим
числовые значения передаточных функций
всех элементов, получим:
одставим
числовые значения передаточных функций
всех элементов, получим:
-
П
 остроим
график переходного процесса системы:
остроим
график переходного процесса системы:
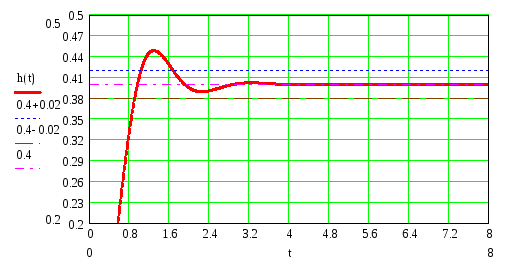
Рисунок 4 –график переходного процесса
Из графика переходного процесса определим прямые показатели качества регулирования САР:
По графику определяем значения 10% трубки, откладывая вверх и вниз по 5% от установившегося значения.
Определим по графику прямые показатели качества:
-
Время регулирования t=2,2
-
Время нарастания t=1,4
-
Время первого согласования t=1,1
-
Число колебаний регулируемой величины n=0
-
Перерегулирование

-
Установившееся значение регулируемой величины h=0.4
-
Максимальное значение регулируемой величины h=0.46
-
Построим АЧХ системы и определим косвенные показатели качества:
Д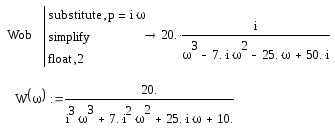 ля
построения АЧХ системы заменим р на
ля
построения АЧХ системы заменим р на
![]() в
передаточной функции системы
в
передаточной функции системы
График АЧХ будет иметь вид:

рисунок 5 - график АЧХ системы
Определим косвенные показатели качества:
-
Частота среза w=4,5 (при значении амплитуды 0,1*А
 )
) -
Колебательность системы М=1
-
Полоса пропускания: для ее определения считается значение
Определяем значение частот при амплитуде 1.4: w1=0 w2=0.5
-
Значение амплитуды при нулевой частоте: А0=2
-
Максимальное значение амплитуды: Amax=2
-
П
 ериод
колебаний:
ериод
колебаний:
-
Перерегулирование: =15%
-
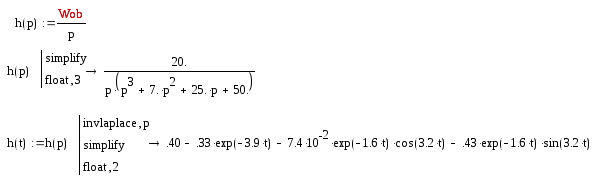
Построим логарифмические характеристики системы: ЛФЧХ есть ФЧХ рассматриваемая как функция ln(ω). Для построения этих характеристик воспользуемся средой MATLAB.
s=zpk('s');w=20/(s^3+7*s^2+25*s+50) – создание ЗПК объекта
Zero/pole/gain:
20
--------------------------------
(s+3.878) (s^2 + 3.122s + 12.89)
>> sisotool(w)
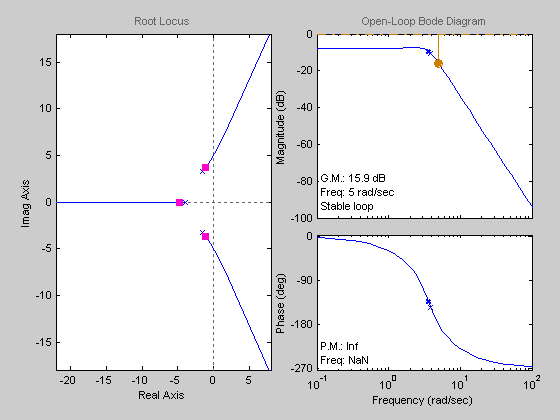
рисунок 6 –график ЛФЧХ и ЛАЧХ системы
Из графиков видно:
-
запас устойчивости по фазе составляет γС=50
-
запас устойчивости по амплитуде LЗАП=15.9 дБ
ВЫВОД
В ходе первой части курсовой работы была найдена общая передаточная функция системы, построены графики переходного процесса, АЧХ, ЛФЧХ и ЛАЧХ. Анализ показателей качества показывает, что система весьма точна в регулировании и не имеет колебаний. Однако другие характеристики говорят о низком запасе устойчивости по фазе, что весьма неблагоприятно скажется на управлении системы при изменении некоторых параметров управления. Данную ситуацию простым изменением коэффициентов исправить не удалось, есть вероятность, что требуется ввод дополнительных звеньев. Достаточно большой запас устойчивости по амплитуде дает шанс серьезного изменения коэффициентов усиления основной схемы, без потери устойчивости.
4 Ввод в систему нелинейного элемента
В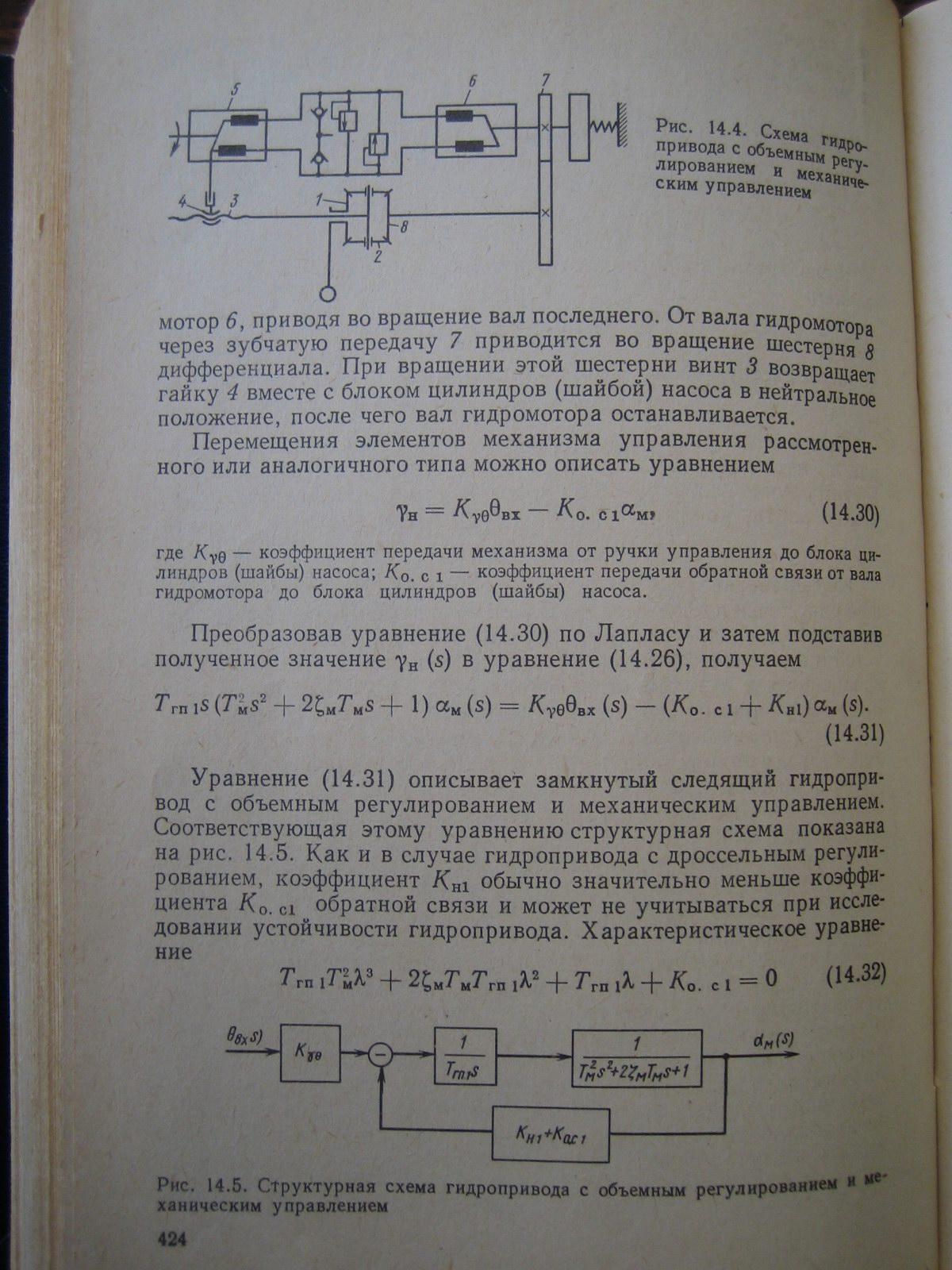





 ведем
в систему нелинейный элемент –
гидравлическое реле. Характеристика
данного реле содержит зону нечувствительности
(рисунок 8).
ведем
в систему нелинейный элемент –
гидравлическое реле. Характеристика
данного реле содержит зону нечувствительности
(рисунок 8).
Рисунок 7 – САР давления с нелинейным элементом

∆Q
р
Рисунок 8 – характеристика гидравлического реле
Данное реле работает следующим образом: струйный усилитель подает количество жидкости на гидравлический двигатель, но до него не доходит до тех пор пока давление не достигнет значения а или –а.
Такая характеристика соответствует следующей системе:
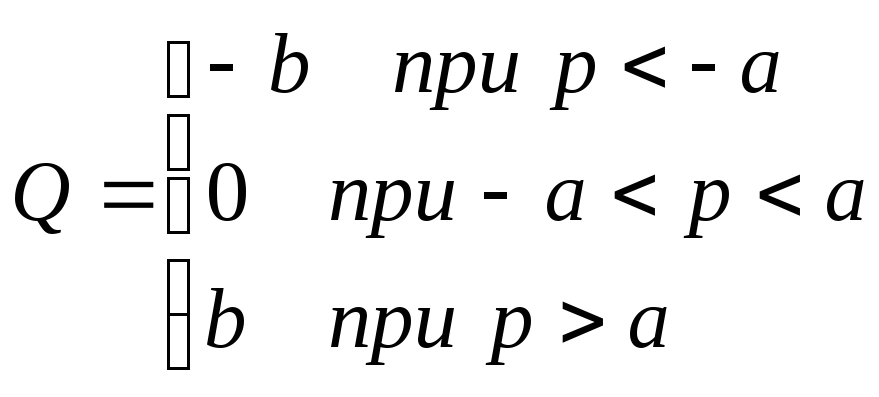 (4.1)
(4.1)
где p – давление на входе гидравлического реле, Q-количества жидкости на выходе гидравлического реле. Для реализации задания, по построению фазового портрета примем следующие значения для b и a:
а=0,5 Па, b=5 м3/c (4.2)
5 Анализ системы с учетом нелинейного элемента
На вход гидравлического реле с сумматора поступает разность давлений P=Pзад-Pо.с (см. рис.8). Будем считать, что разность давлений системы P=0. Обозначим сигнал на выходе линейной части x=P(S) Тогда на вход нелинейного элемента будет поступать сигнал Р =-x, а на вход линейной части x1=F(Р)= F(-x). Преобразуем исходную систему (см. рисунок 7) в одноконтурную систему с последовательно соединенными нелинейной и линейной частями (рисунок 8).
X=P(s) X1=F(-x)
- P(s)=0 P








![]()



![]()
![]()
X=P(s)
![]()
Рисунок
8 - Преобразованная структурная схема
САР
Линейная часть разомкнутой системы будет иметь следующую передаточную функцию:
>> W=w1*w2*w3*w4
Zero/pole/gain:
4
--------------------------
(0.04s^2 + 28s + 1)
На основании системы 4.1 и условий 4.2, имеет следующий вид:
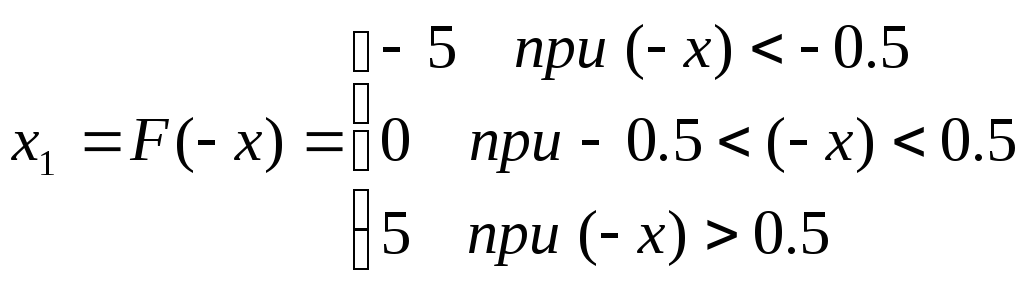 (5.1)
(5.1)
Воспользовавшись передаточной функцией линейной части и релейной зависимостью F(-x), найдем дифференциальное уравнение, описывающее систему.
![]() (5.2)
(5.2)
Так как релейная характеристика элемента нечетная, то F(-x)=-F(x). Тогда
получим:
![]() (5.3)
(5.3)
Перехода в 5.3 к дифференциальному виду имеем:
![]() (5.4)
(5.4)
Введем
замену
![]()
Так как фазовый портрет строится на плоскости, отбросим члены у которых показатель степени выше 2:
![]() (5.5)
(5.5)
Преобразуя (5.5) получим:
![]()
Для
построения фазового портрета перейдем
к дифференцированию по переменной x
(вводя замену
![]() ):
):
![]() (5.6)
(5.6)
Воспользовавшись системой 5.1, находим аналитическое значение выражения F(x):
![]()
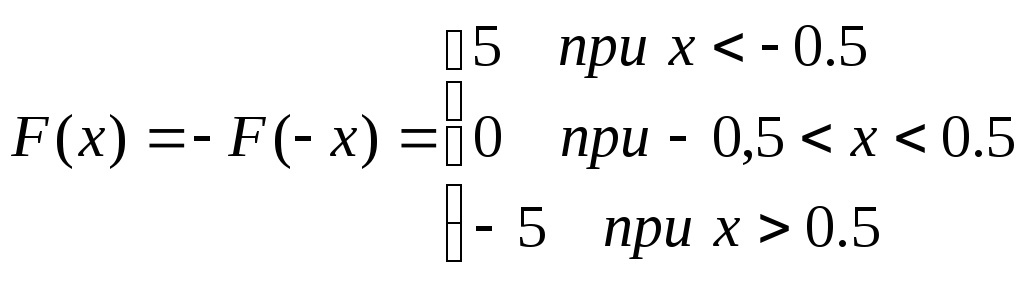 (5.7)
(5.7)
Применяя полученную систему 5.7 к уравнению 5.6, получаем следующую зависимость:
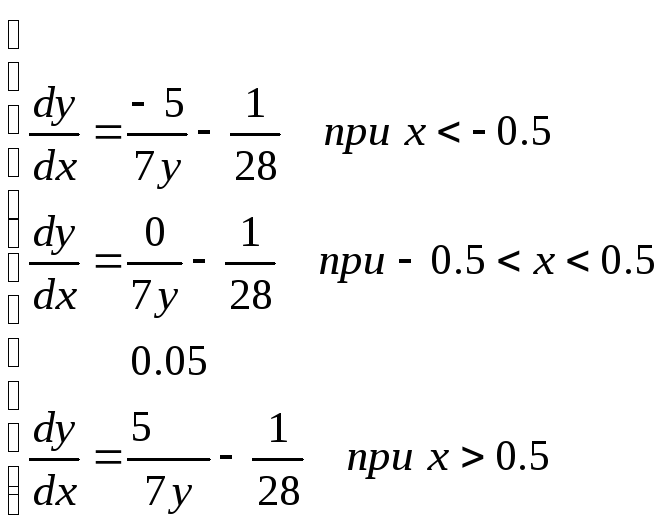 (5.8)
(5.8)
Для построения фазовых траекторий на плоскости, воспользуемся программным математическим пакетом Mathcad. Зададим вектор начальных условий:

Определим функцию D по 3-м линейным участкам нелинейной статической характеристики (см (5.8)) Для этого применяем метод условного программирования.
Построим
траекторию на фазовой плоскости,
предполагая, что первый столбец матрицы
решения
![]() содержит точки, в которых ищется решение
дифференциального уравнения, второй
содержит точки, в которых ищется решение
дифференциального уравнения, второй
![]() - содержит значения найденного решения,
то есть y(t) и, наконец, третий столбец
- содержит значения найденного решения,
то есть y(t) и, наконец, третий столбец
![]() содержит первые производные этого
решения, то есть dy(t)/dt.
содержит первые производные этого
решения, то есть dy(t)/dt.

Найдем матрицу решения заданной функции.
![]()
![]()
На рисунке 9 приведен полученный фазовый портрет.
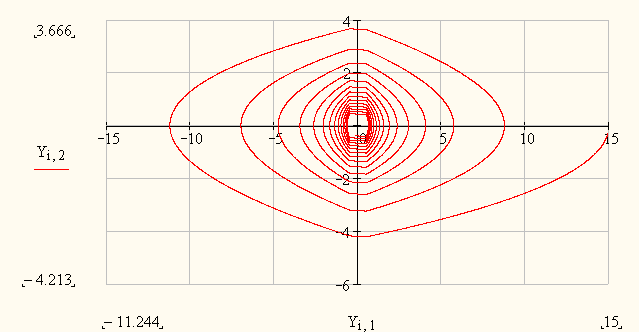
Рисунок 9 – фазовый портрет САР
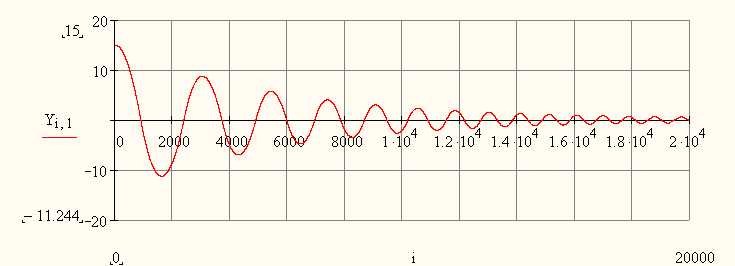
Рисунок 10 – график переходного процесса САР
Из графика переходного процесса и фазового портрета можно сделать вывод, что колебания в системе носят затухающий характер, с большим показателем времени затухания. Из точки, соответствующей начальным условиям, система движется в точку, где она находится в некотором равновесном состояние. Это является достаточным для нормального функционирования системы.