


СОДЕРЖАНИЕ
Введение 3
1 Описание системы 4
1.1 Принципиальная схема САУ и описание работы системы 4
1.2 Функциональная схема САУ 4
1.3 Структурная схема САУ 5
2 Исследование линейной САУ 7
2.1Расчет передаточной функции линейной системы 7
2.2 Определение устойчивости линейной САУ по критерию Гурвица 7
2.3 Переходный процесс линейной системы и определение показателей качества 8
2.4 Построение АЧХ линейной системы и определение показателей
качества
2.5 Определение показателей качества системы 9
2.6 Построение ЛАЧХ линейной системы и определение запасов
устойчивости 11
2.7 Аппроксимация ЛАЧХ линейной системы и определение передаточной функции 12
2.8 Вывод по исследованию линейной системы 13
3 Исследование нелинейной системы 14
3.1 Преобразование нелинейной системы 14
3.2 Построение фазового портрета нелинейной системы 15
3.3 Вывод по исследованию нелинейной системы 17
Заключение 18
Список использованных источников 19
ВВЕДЕНИЕ
Основной целью выполнения данной курсовой работы является закрепление на практике знаний и навыков математического анализа систем автоматического управления.
В ходе работы должны быть исследованы линейная, нелинейная и дискретная системы. Исследование состоит из выполнения типовых задач анализа и синтеза систем управления, применения различных критериев устойчивости систем, определения показателей качества управления, выполнения эквивалентных преобразований структурных схем.
1 ОПИСАНИЕ СИТЕМЫ
1.1Принципиальная схема САУ и описание работы системы
На рисунке 1 показана принципиальная схема торможения электропоезда.

Рисунок 1 - Принципиальная схема торможения электропоезда
Машинист нажимает тормозной рычаг. Открывается клапан, и мощный поток сжатого воздуха прижимает тормозные колодки. То есть, клапан можно назвать усилительным элементом, который усиливает слабую энергию, затрачиваемую человеком за счет сильной энергии сжатого воздуха. Когда на поршень начинает давить сжатый воздух - поршень движется вперед и прижимает колодки плотно к колесу. Поезд тормозит.
1.2 Функциональная схема сау
Функциональная схема отображает функциональные связи в системе управления, составляется на основе описания работы САУ.

Рисунок 2 - Функциональная схема торможения электропоезда
В функциональную схему вошли следующие элементы:
Р – рычаг;
БСВ – бак со сжатым воздухом;
ТКл – тормозной клапан;
П – поршень;
ТК – тормозная колодка;
К – колесо.
1.3 Структурная схема сау
Структурная схема системы автоматического управления отражает связь между элементами и информацию о передаточной функции.
Для составления структурной схемы необходимо определить передаточные функции элементов САУ.
Таблица 1 - Передаточные функции элементов САУ
|
№ п/п |
Элемент САУ |
Передаточная функция |
|
1 |
Рычаг |
|
|
2 |
Бак со сжатым воздухом |
|
|
3 |
Тормозной клапан |
|
|
4 |
Поршень |
|
|
5 |
Тормозная колодка |
|
|
6 |
Колесо |
|










Рисунок 3 - Структурная схема торможения электропоезда
2 Исследование линейной сау
2.1 Расчет передаточной функции линейной системы
Передаточная функция системы рассчитывается по формуле:

Для расчетов используем программу Mathcad.


2.2 Определение устойчивости линейной сау по критерию Гурвица
(устойчивость систем по Рауссу, Михайлова, если не устойчива по Евсюкову и подобрать коэффициенты к1 и к2 )
Для устойчивости системы необходимо и достаточно, чтобы все миноры определителя Гурвица были положительны. По коэффициентам характеристического уравнения составляется определитель Гурвица.
L(p)= (4)
(4)
Составим определитель Гурвица
Произведем вычисление миноров в определителе Гурвица
 ,
(5)
,
(5)
 .
(6)
.
(6)
Система является устойчивой, так как все коэффициенты характеристического уравнения положительны и миноры определителя Гурвица также являются положительными.
2.3 Переходный процесс линейной системы и определение показателей качества
Переходная функция системы h(t) – это функция определяющая изменение выходной величины системы, при подаче на вход единичного ступенчатого воздействия.
Используя математический редактор MathCAD, построим переходный процесс системы.
![]() (7)
(7)

Рисунок 4 - Переходный процесс линейной системы
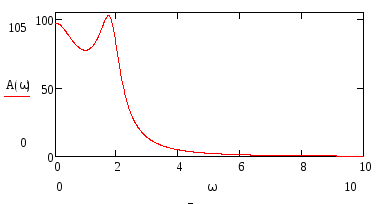
2.4 Построение АЧХ линейной системы и определение показателей качества
Используя математический редактор MathCAD, построим амплитудно-частотную характеристику системы.
Заменим
в уравнении (3)
 :
:

(8)
Рисунок 5 - Амплитудно–частотная характеристика линейной системы
2.5 Определение показателей качества системы
Для определения прямых оценок качества системы воспользуемся переходным процессом (рисунок 4)
-
Время регулирования – это время регулирования, за которое переходной процесс выходит в 5%-трубку.
tр=1,94 с
-
Время первого согласования – это время, за которое система в первый раз достигает установившегося состояния.
tс=14,8 с
-
Установившееся значение регулируемой величины
hуст=97,1
-
Время нарастания – это время, при котором выходная величина достигает максимального значения.
tн=5,88 с
-
Максимальное значение регулируемой величины
hmax=101.02
-
Колебательность – это число колебаний системы от момента воздействия на нее до перехода в установившееся состояние.
n=4
-
Величина перерегулирования находится по формуле:


Для определения косвенных оценок качества системы воспользуемся АЧХ системы (рисунок 5).
-
Частота среза – это частота, при которой амплитуда равна единице.
 6,53
с-1
6,53
с-1
-
Резонансная частота – это частота, при которой амплитуда имеет максимальное значение.
 1,75
с-1
1,75
с-1
-
Максимальное значение амплитуды:
-

-
Амплитуда при нулевой частоте:
А(0)=97.32
-
Показатель колебательности:

-
Полоса пропускания:
-
Время регулирования:


1,92 c<tp<10,76 c
2.6 Построение ЛАЧХ линейной системы и определение запасов устойчивости
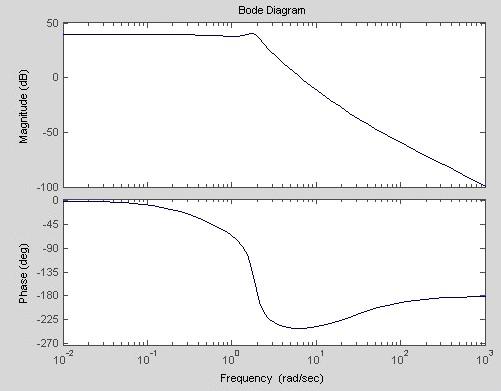
Используя математический редактор MATLAB, построим ЛАЧХ и ЛФЧХ системы.
>> W=tf([4.16 97.32],[0.39 0.552 1.568 1])
Transfer function:
4.16 s + 97.32
----------------------------------
0.39 s^3 + 0.552 s^2 + 1.568 s + 1
>> bode(W)
φ(ω)
L(ω)
(W
ω, Гц
Рисунок 6 - ЛАЧХ линейной системы
Запас
устойчивости по амплитуде
 .
.
Запас
устойчивости по фазе

2.7 Аппроксимация ЛАЧХ линейной системы и определение передаточной функции

0 дБ/дек
- 40 дБ/дек
Рисунок 7 - Аппроксимация ЛАЧХ линейной системы
Передаточная функция аппроксимированной ЛАЧХ имеет вид:

 ,
(10)
,
(10)
 (11)
(11)
С учетом коэффициентов выражение (9) примет вид:

2.8 Вывод по исследованию линейной системы
В ходе исследования линейной системы была получена передаточная функция системы. Определили, что система является устойчивой по критерию устойчивости Гурвица. Построили переходный процесс и АЧХ системы, определили показатели качества. При помощи математического редактора MATLAB построили ЛАЧХ системы и определили запасы устойчивости.
3 ИССЛЕДОВАНИЕ НЕЛИНЕЙНОЙ СИСТЕМЫ
3.1 Преобразование нелинейной системы
Р
ТКл
П
ТК
К
НЭ
БСВ
Рисунок 8 - Функциональная схема САУ с нелинейным элементом
График, описывающий нелинейный элемент приведен на рисунке 10.

Рисунок 9 - Релейная статическая характеристика нелинейного элемента
Применяя правила преобразования структурных схем, упростим схему, изображенную на рисунке 9:

Рисунок 10 - Упрощенная схема нелинейной системы
Введем вынужденную обратную связь:

-
Рисунок 11 - Итоговое преобразование САУ с нелинейным элементом

С учетом всех преобразований Wобщ (p) примет вид:
