

Введение
Основой управления любым технологическим процессом является получение и обработка информации о состоянии работы объекта управления (ОУ), а также влияние на сам процесс с помощью устройства управления (УУ). Такие системы автоматического управления (САУ) должны учитывать все входные факторы, в том числе и возмущающие воздействия, чтобы работа объекта управления была не только устойчива, но и чтобы основные параметры и величины системы были однозначно определены. Построение систем автоматического управления требует создания качественных регуляторов, для которых отклонение от заданных значений величин процесса укладывались в заранее известные интервалы.
Данная задача является первостепенной в любой САУ. Построение качественного устройства управления требует создание такой системы, которая была бы устойчивой при некотором изменении внешних факторов или внутренних процессов.
1 ИССЛЕДОВАНИЕ ЛИНЕЙНОЙ ЧАСТИ СИСТЕМЫ
1.1 Выбор линейной системы автоматического управления
Автором данной курсовой работы была выбрана система статического регулятора уровня прямого действия.
Принцип действия системы статического регулятора уровня прямого действия.
В данной системе измерительным регулятором служит поплавок 4, преобразующий изменения уровня жидкости в баке 1 в линейные перемещения, которые вызывают поворот рычага 5 относительно точки А. Ко второму концу рычага прикреплен регулирующий клапан 2, изменяющий приток жидкости в бак 1. Уровень жидкости в баке регулирует насос 3, установленный на выходе.
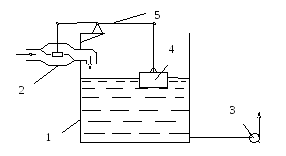
1– регулирующий клапан; 2 – бак; 3 – насос; 4 – поплавок; 5 − рычаг.
Рисунок 1 - Принципиальная схема системы статического регулятора
уровня прямого действия
1.2 Функциональная схема системы
На основе имеющейся функционально-принципиальной схемы построим функциональную схему.
Функциональная схема – это схема, состоящая из функциональных элементов, которые показывают их функциональное назначение при автоматическом управлении технологическим процессом и связь между ними.
1– регулирующий клапан; 2 – бак; 3 – насос; 4 – поплавок; 5 − рычаг.
Рисунок 2 - Функциональная схема системы статического регулятора уровня
прямого действия
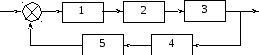
1.3 Построение структурной схемы системы
На рисунке 3 представлена структурная схема системы статического регулятора уровня прямого действия.
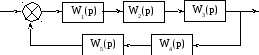
W1 (p) - передаточная функция регулирующего клапана;
W2 (p) - передаточная функция бака;
W3 (p) - передаточная функция насоса;
W4 (p) - передаточная функция поплавка;
W5 (p) - передаточная функция рычага.
Рисунок 3 - Структурная схема системы статического регулятора уровня
прямого действия
Передаточные функции звеньев исследуемой системы.
Передаточная регулирующего клапана:
W1(р) = k = 2.
Передаточная функция бака:
W2(р) = k / Тр+1= 3/13р+1.
Передаточная функция насоса:
W3 (р) = k / (Т1р+1)(Т2р+1) =4/(0,4р+1)(0,04р+1).
Передаточная функция поплавка:
W4(р) = k / Тр+1 = 5/0,5р+1.
Передаточная функция рычага:
W5(р) = k = 5.
1.4 Преобразование структурной схемы
Применяя правила преобразования структурных схем, упростим схему.
Выражение для общей передаточной функции:
![]()
Wобщ
(p)


Рисунок 4 - Структурная схема системы после преобразования
Запишем общую передаточную функцию исследуемой системы с коэффициентами.
![]()
1.5 Определение устойчивости по критерию Гурвица
Передаточная функция САУ имеет вид:
![]() ,
,
где знаменатель передаточной функции есть характеристическое уравнение:
![]() =0,
(1)
=0,
(1)
Общий вид характеристического уравнения имеет вид:
![]() .
.
Определитель
Гурвица составляется из коэффициентов
характеристического уравнения. Для
этого по главной диагонали определителя
записываются все коэффициенты
характеристического уравнения, начиная
со второго, то есть
![]() ,
,
![]() ,
,
![]() …
…
![]() ,
затем вверх записываются коэффициенты
с возрастающим индексом, а вниз с
убывающим индексом, на остальные
оставшиеся места вписываются нули.
,
затем вверх записываются коэффициенты
с возрастающим индексом, а вниз с
убывающим индексом, на остальные
оставшиеся места вписываются нули.
Для проверки правильности заполнения определителя Гурвица необходимо учесть, что по строкам чередуются коэффициенты с нечетными и четными индексами. Так первая строка – нечетные индексы, вторая – четные.
Из характеристического уравнения (1) выпишем коэффициенты:
а0=0,104, а2=11,97, а4=601.
а1=2,842, а3=13,904.
Составим определитель Гурвица:

![]() ,
,
![]()

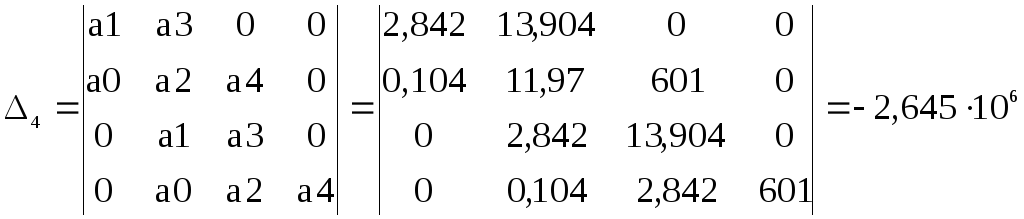
Для того чтобы система управления была устойчива необходимо и достаточно, чтобы все определители Гурвица были положительными и должны иметь один знак с a0, то есть быть больше нуля.
Таким образом,
получили, что система управления на
основании критерия Гурвица не устойчива,
так как
![]() и
и
![]() .
.