




Введение
Автоматическое регулирование представляет собой наиболее эффективный принцип автоматики при частичной автоматизации, когда технические средства автоматики осуществляют лишь простые функции управления, связанные с измерением, анализом, контролем различных физических величин и отработкой решений, принятых оператором в виде установок, программ или других сигналов управления.
Современные системы управления сложными объектами промышленной технологии строятся по иерархическому принципу. Это значит, что система управления такими объектами расчленяется на ряд систем, стоящие на разных уровнях подчинения. Система более высокого ранга, ориентируясь на общий (глобальный) критерий управления, выдает команды на включение или отключение отдельных локальных объектов, а также осуществляет выбор частных критериев управления этими объектами. Локальные системы управления осуществляют поддержание заданных оптимальных режимов, как в пусковых, так и в нормальных эксплуатационных условиях. Являясь нижним иерархическим уровнем автоматических систем управления промышленными объектами локальные системы осуществляют функции измерения, контроля и регулирования основных технологических параметров, характеризующих состояние технологического процесса. Количество регулируемых параметров в отдельно взятой локальной системе управления невелико и составляет один или два параметра. Из общего числа систем управления современным производством локальные системы составляют около 80%. Качество работы локальных систем управления во многом определяет стабильность и качество выходного продукта, а, следовательно, и рентабельность производства.
1 ИССЛЕДОВАНИЕ ЛИНЕЙНОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
-
Описание технологической схемы системы автоматического управления
Дана схема блока автоматизированного управления доставкой породы на отвал.
8 9 10
7

4
11
1
12
3
2
6
5
1 – породный бункер; 2 – затвор; 3- привод; 4 – пусковая аппаратура;
5 – вагонетка; 6 – отвал; 7 – лебёдка; 8 – кнопочный пост; 9 – схема управления; 10 – магнитная станция; 11 – тяговый канат; 12 – обводной ролик; Д1-Д8 – датчики.
Рисунок 1 - Технологическая схема доставки породы на отвал
Рядовой уголь выдается на поверхность угольным скипом в приемный бункер, расположенный в надшахтном здании скипового ствола. Из бункера уголь подается через распределительную воронку в дробильно-сортировочное отделение, откуда через классификационный узел идет распределение на уголь и породу. Выданная на поверхность порода поступает на породный отвал.
Процесс доставки на отвал осуществляется следующим образом.
Выданная из шахты порода поступает в породный бункер 1, откуда через затвор 2, оборудованный приводом 3 и пусковой аппаратурой 4, загружается в транспортный сосуд - вагонетку 5. После загрузки вагонетка направляется на отвал 6 для разгрузки. Перемещение вагонетки по отвалу осуществляется при помощи маневровой лебедки 7, управляемой оператором дистанционно посредством кнопочного поста 8, схемы управления 9 и магнитной станции 10.
В состав схемы управления входит командоаппарат и реле разгона для задания нужной циклограммы движения транспортного сосуда. Дистанционно управляется и затвор бункера, обеспечивающий загрузку вагонетки. Для установки привода затвора в двух положениях ("открыто" - "закрыто") в схеме используются концевые выключатели Д1 и Д2, а для направления тягового каната 11 при его намотке на барабан маневровой лебедки применен обводной ролик 12, установленный на разгрузочной стреле террикона.
Анализ организации процесса отвалообразования показывает, что разрабатываемый блок автоматизированного управления доставкой породы на отвал должен выполнять следующие функции:
1) функции управления: включить, отключить бункерный затвор (воздействие на магнитный пускатель электродвигателя затвора); включить отключить маневровую лебедку (воздействие на магнитную станцию управления);
2) информационные функции: наличие, отсутствие уровня породы в бункере; постановка вагонетки под погрузку, разгрузку - формирование информационных команд, поступающих на информационное табло оператора.
1.2 Построение функциональной схемы блока автоматизированного управления доставкой породы на отвал
На основе имеющейся технологической схемы построим функциональную схему.
Функциональная схема – это схема, состоящая из функциональных элементов, которые показывают их функциональное назначение при автоматическом управлении технологическим процессом и связь между ними.
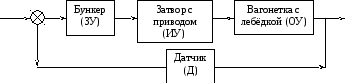
u(t) x(t) Q(t) P(t) y(t)
–
e(t)
u(t) – входной сигнал (наличие породы); x(t) – сигнал об уровне породы в бункере; Q(t) – задающий сигнал (открытие затвора); P(t) – управляющий сигнал (подъём вагонетки); y(t) – выходной сигнал; e(t) – сигнал ошибки.
Рисунок 2 – Функциональная схема блока автоматизированного управления доставкой породы на отвал