

Федеральное агентство по образованию
Ульяновский Государственный Технический Университет
Кафедра “Электропривод и автоматизация промышленных установок”
Курсовая работа
на тему:
«Система автоматического управления электроприводом переменного тока»
Выполнил:
Проверил:
Ульяновск, 2009.
Задание на курсовую работу
|
Номинальная мощность двигателя |
Рн |
кВт |
3,5 |
|
Частота вращения вала двигателя |
nН |
об/мин |
870 |
|
Номинальное напряжение на якоре |
Uян |
В |
220 |
|
Частота вращения вала двигателя |
nН |
об/мин |
870 |
|
Номинальный ток статора |
Iсн |
А |
10,1 |
|
Активное сопротивление статора |
rc |
Ом |
2,16 |
|
Реактивное сопротивление статора |
xc |
Ом |
2,03 |
|
Номинальный ток ротора |
Iрн |
А |
7 |
|
Активное сопротивление ротора |
r’р |
Ом |
3,33 |
|
Реактивное сопротивление ротора |
x’р |
Ом |
1,46 |
Содержание
-
Введение
-
Статические характеристики разомкнутой системы ТПЧ-АД.
-
Система скалярного управления частотным электроприводом.
-
-
Динамические характеристики САУ.
-
Преобразователь частоты с автономным инвертором напряжения и управляемым выпрямителем
-
Структурная схема ТПЧ-АД
-
АД как объект автоматического управления.
-
Структурное упрощение САУ
-
Исследование устойчивости САУ
-
Критерий Михайлова.
-
Критерий Найквиста.
-
Критерий устойчивости на плоскости ЛАЧХ.
-
-
-
Настройка САУ на технический оптимум.
-
Переходный процесс.
-
Заключение
-
Список использованной литературы
-
Введение
Развитие полупроводниковой преобразовательной техники привело к широкому использованию электроприводов с электродвигателями переменного тока, к созданию новых систем управления этими электродвигателями. В регулируемых электроприводах применяют различные способы регулирования скорости электродвигателя путем изменения: напряжения статора, частоты и напряжения статора, частоты и напряжения ротора, добавочного сопротивления в цепи ротора и т.д.
Управление электродвигателями переменного тока осложнено рядом обстоятельств, наиболее существенными из которых являются следующие: 1) момент электродвигателя определяется произведением двух результирующих векторов электромагнитных параметров статора и ротора и является функцией четырех переменных; 2) имеется сильное взаимодействие намагничивающих сил статора и ротора, взаимное состояние которых непрерывно меняется при вращении ротора; 3) с целью лучшего использования двигателя в различных режимах его работы возникает задача регулирования магнитного потока двигателя.
Электродвигатели переменного тока совместно с управляемыми преобразователями представляют собой сложные многосвязные нелинейные объекты управления. Полное математическое описание таких объектов оказывается довольно громоздким и неприменимым для инженерных методов синтеза систем управления. Вместе с тем в практике построения систем электроприводов, включая и АСУ ЭП переменного тока, получили распространение простые приемы синтеза систем управления, основанные на принципах подчиненного управления и на использовании унифицированных настроек контуров регулирования, входящих в систему управления. Использование этих приемов позволяет не только просто выполнить синтез систем управления, но и создает обоснованную возможность упрощения математического описания электроприводов переменного тока, в частности возможность пренебрежения взаимосвязью ряда координат и параметров электроприводов.
Основная сложность при создании АСУ ЭП переменного тока заключается в создании независимого управления электромагнитным моментом и потоком двигателя. Если это удается выполнить, то АСУ ЭП переменного тока с обратными связями по скорости или по положению выполняются точно так же, как и АСУ ЭП постоянного тока, включая и способы управления пусковыми и тормозными режимами.
При синтезе взаимосвязанных систем управления используются два основных приема, обеспечивающих автономность (независимость) контуров регулирования: а) использование различного рода дополнительных компенсационных связей между локальными контурами регулирования; б) разделение локальных контуров регулирования по быстродействию. Оба этих приема используются при выполнении АСУ ЭП переменного тока, и это дает основание уже на стадии формирования математической модели электропривода делать ряд упрощений.
-
Статические характеристики разомкнутой системы тпч-ад.
-
Система скалярного управления частотным электроприводом.
-
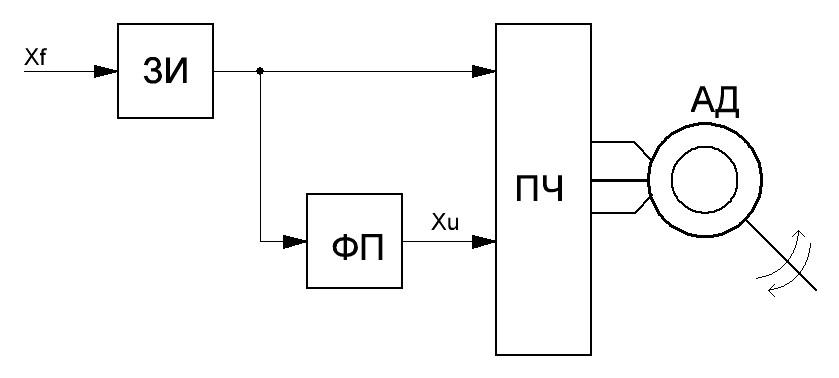
Рис. 1. Обобщенная структурная схема частотно-регулируемого электродвигателя, где ЗИ – задатчик интенсивности, ПЧ – преобразователь частоты, ФП – функциональный построитель, xf, xu – управляющие сигналы в каналах управления частотой и напряжением, АД – асинхронный двигатель.
В настоящее время системы скалярного управления применяют в приводах с ограниченным диапазоном регулирования, работа которых происходит в основном в установившемся режиме.
Для ограничения изменения скорости управления сигнала используют задатчик интенсивности. В связи с невысокими требованиями системы как правило работают без обратной связи (разомкнутая система).
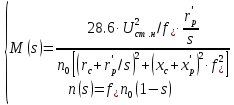
Получим механическую характеристику ТПЧ-АД n=f(M) при Uстi=const, fстi=const. Известно, что критический момент выражается:
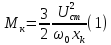


Где f* - относительная частота.

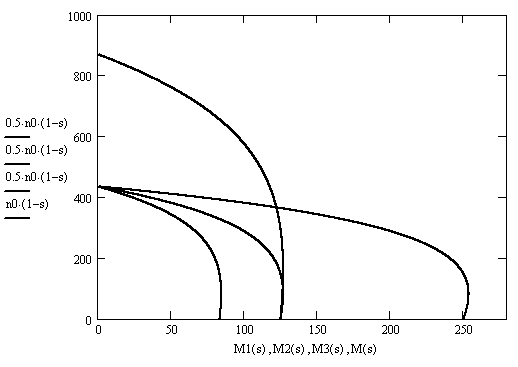
Рис. 2. Механические характеристики ТПЧ-АД.
Коэффициент допустимой перегрузки:
С помощью уравнений (1) и (2) получаем основной закон частотного регулирования:
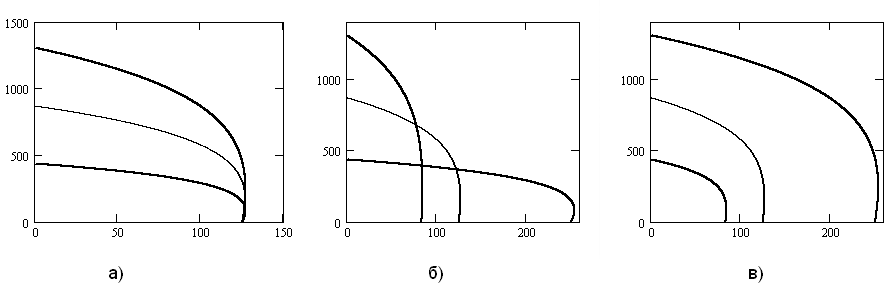
Отсюда получаем следующие варианты частотного регулирования:
-
При постоянстве перегрузочной способности, т.е. кратности критического момента к моменту статической нагрузки, для любой из регулировочных механических характеристик:


Т.е.
при постоянстве момента статической
нагрузки напряжение источника питания
должно изменяться пропорционально его
частоте
 .
.
-
При постоянстве мощности



т.е. при постоянстве мощности статической нагрузки напряжение источника питания должно изменяться пропорционально корню квадратному из значения частоты.
-
При вентиляторной нагрузке


т.е. при вентиляторной нагрузке напряжение источника питания должно изменяться пропорционально квадрату значения частоты.