

-
Структурная схема тпч-ад.

Рис. 9. Функциональная схема преобразователя частоты.
В соответствии с эквивалентной схемой цепи выпрямитель - фильтр (рис. 9.) можно записать основные уравнения динамики такой цепи в приращениях координат относительно начальных значений:

где
 - приращение ЭДС выпрямителя;
- приращение ЭДС выпрямителя;
 ,
,
 ,
,
 – приращение токов в цепях выпрямителя,
конденсатора Сф и инвертора; Lэк,
Rэк
– эквивалентные индуктивность и
сопротивление выпрямителя;
– приращение токов в цепях выпрямителя,
конденсатора Сф и инвертора; Lэк,
Rэк
– эквивалентные индуктивность и
сопротивление выпрямителя;
 - приращение напряжения питания АИН.
- приращение напряжения питания АИН.
Переходя к операторной записи уравнений (1), получим упрощенную структурную схему электромагнитной цепи ТП частоты, работающего на электродвигатель (рис. 10).


УВ представлен апериодическим звеном первого порядка с передаточной функцией (ПФ)



Рис. 10. Структурная схема преобразователя частоты.
Структурная схема АИН построена с учетом влияния конденсатора фильтра Сф и Rэк, Lэк.
Выходная координата ∆U1α является одной из составляющих напряжения статора.
Kпu = Uвых/Uвх – коэффициент преобразования напряжения инвертора.
Kпi = Iвых/Iвх - коэффициент преобразования тока инвертора.
-
Ад как объект автоматического управления.
При исследовании переходных процессов в электродвигателях переменного тока применяют различные ортогональные системы координат, отличающихся угловой скоростью вращения координатных осей ωк, например системы, оси которых неподвижны относительно ротора, или неподвижны относительно статора, или вращающихся с синхронной скоростью.
Уравнения АД в системе координат, вращающихся с произвольной скоростью ωк, имеют вид

Где ω – угловая скорость вращения ротора; pп – число пар полюсов.
При исследовании переходных процессов в АД, управляемом частотой и напряжение статора, удобно использовать систему координат, вращающуюся со скоростью ωк, равной угловой скорости вращения магнитного поля ω’0, приведенной к числу пар полюсов, равному единице (приведенной к двухполюсному электродвигателю). Предполагается при этом справедливым равенство

Где f1 – частота напряжения статора; ω1 – угловая частота напряжения статора.
На основании уравнений (4) для рассматриваемой системы координат можно записать

Где s – скольжение электродвигателя:

 – угловая скорость
вращения магнитного поля, или синхронная
скорость электродвигателя.
– угловая скорость
вращения магнитного поля, или синхронная
скорость электродвигателя.
Потокосцепления связаны с токами через индуктивности
 (8)
(8)
Уравнение момента АД:

Для изображения
векторных величин рассмотрим их на
комплексных осях α и β, совместив вектор
напряжения статора с вещественной осью
 Сравнительно простая структурная схема
может быть получена, если пренебречь
активным сопротивлением статорной
цепи, т.е. положить R1=0,
R2≠0.
Сравнительно простая структурная схема
может быть получена, если пренебречь
активным сопротивлением статорной
цепи, т.е. положить R1=0,
R2≠0.
Передаточная функция, связывающая изменение электромагнитно момента двигателя ∆М при изменении напряжения статора ∆u1α и неизменной частоте напряжение статора (ω1=const).

В результате математических преобразований получим структурную схему АД как объекта регулирования частоты и напряжения.

Рис.11. Структурная схема АД как объекта регулирования частоты и напряжения.
 - относительная
частота статора;
- относительная
частота статора;
 - относительное
напряжение (γ=0÷1);
- относительное
напряжение (γ=0÷1);
 - электромагнитная
постоянная времени электродвигателя;
- электромагнитная
постоянная времени электродвигателя;
 – механическая
постоянная времени двигателя;
– механическая
постоянная времени двигателя;
 – коэффициент
электромагнитной связи статора.
– коэффициент
электромагнитной связи статора.
Пренебрегая электромагнитной постоянной Tэл=0, ∆xf =0, получим структурную схему ТПЧ-АД в статическом режиме, полагая, что p=0.

Рис. 12. Структурная схема ТПЧ-АД в статическом режиме.
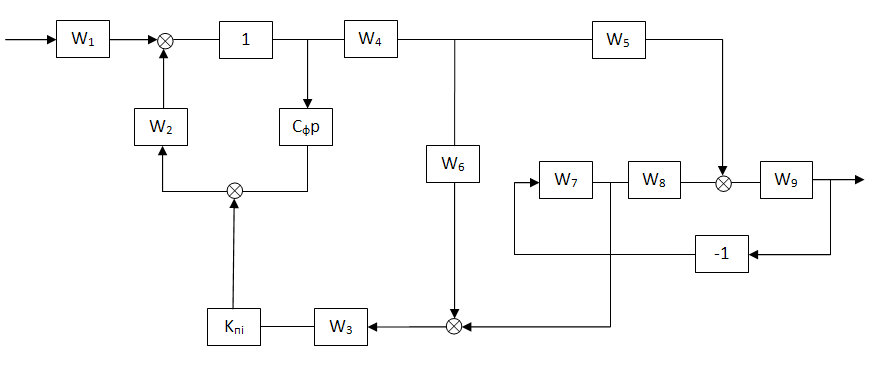
Рис. 13. Упрощенная структурная схема САУ при ∆xf=0.
Элементы схемы:

KB = 100 – передаточный коэффициент выпрямителя.


Rэк=0,5 Ом – эквивалентное сопротивление выпрямителя.
Lэк=0,01 Гн - эквивалентная индуктивность выпрямителя.






s – скольжение.






Сф=500·10-6 Ф – сглаживающий конденсатор.