

8 Определение абсолютной устойчивости нелинейной системы автоматического управления по критерию в.М.Попова
В исследовании САУ ставится задача определить устойчивость по критерию Попова. Критерий Попова является достаточным: для абсолютной устойчивости нелинейной САУ достаточно, чтобы линейная часть системы была асимптотически устойчивой и для любых частот выполнялось неравенство Попова:
![]() (8.1)
(8.1)
где - любое действительное число,
k– значениеk-сектора – тангенс угла наклона прямой задающей нелинейность.
Достаточно, чтобы существовало такое , что для любых частот , выполнялось бы это неравенство.
Критерий Попова решается геометрически
 (8.2)
(8.2)
Для этого вводим понятие модифицированного годографа, у которого действительная часть U*() совпадает с действительной частью не модифицированного годографа , а мнимая часть равнаV*()=V().Т.к. линейная часть имеет нулевые корни, критерий Попова применять нельзя, но в этом случае применятся обобщение на критерий Попова:
В структурную схему вводит 2 фиктивные цепи ,при этом kфсуммарно на систему не влияют.

Рисунок 22 — Структурная схема с фиктивными звеньями
Введенные фиктивные звенья ничего не изменяют в системе и их выходные сигналы взаимно компенсируют друг друга.
 (8.3)
(8.3)
ф(x)= ф(x) –kф(x)
Построим модифицированный годограф для фиктивной линей части, т.е. выделим мнимую и реальную часть, заменив S=j, и для получения модифицированного годографа мнимую часть умножим на
Одновременно подбираем величину Кф < Kтакой , чтобы передаточная функция была устойчива.
К=0.1
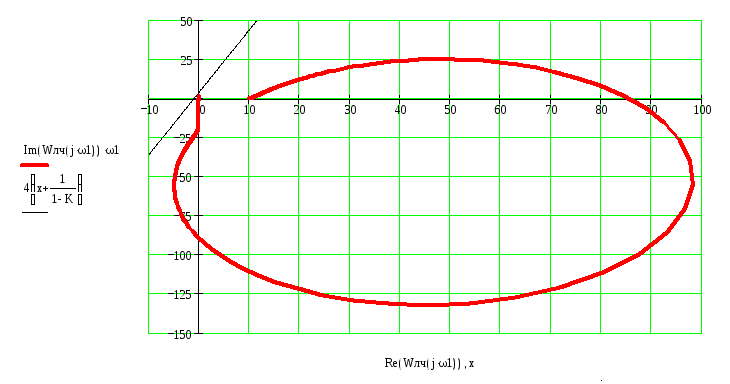
Рисунок 23 — Модифицированный годограф
Так как можно провести прямую через
точку (![]() )
слева от характеристикиWлф
, следовательно можно сделать вывод ,
что система абсолютно устойчива.
)
слева от характеристикиWлф
, следовательно можно сделать вывод ,
что система абсолютно устойчива.
При этом возникают некоторые ограничения по входному сигналу: К‑сектор сужается на arctg0.1 = 5.7o.
Заключение
В результате выполнения курсовой работы был произведён анализ и синтез системы автоматической стабилизации углового положения летательного аппарата в горизонтальной плоскости (автопилот), что главным образом включило в себя
–получение математических моделей системы и построение структурной схемы в целом;
–синтез корректирующего звена цепи рулевого тракта с помощью метода ЛАЧХ Солодовникова; корректирующее звено синтезировано таким образом, что обеспечивается точность и требуемые показатели качества; для полученного корректирующего звена предложена упрощённая техническая реализация;
–Д‑разбиение по одному параметру; с помощью этого метода определена область-претендент на устойчивость, из которой был выбран коэффициент передачи электронного усилителя, такой, что система ведёт себя нилучшим образом;
–исследование нелинейности в контуре рулевого тракта методом гармонической линеаризации; установлено, что в системе возникают автоколебания частотой 1.49 Гц и амплитудой 14.4;
–проверку на абсолютную устойчивость по критерию В.М.Попова; система оказалась абсолютно устойчивой, но при этом наложено ограничение на управляющий сигнал.
Таким образом, выполнена поставленная задача — задача анализа и синтеза систем автоматического управления с применением ЭВМ.
Библиография
1. Бесекерский В.А., Теория систем автоматического регулирования/ В.А. Бесекерский, Е.П.Попов. – М.: Наука, 1972. – 768с.
2. Иващенко Н.Н. Автоматическое регулирование/ Н.Н.Иващенко. - М.: Машиностроение, 1973.- 606с.
3. Кузовков Н.Т. Динамика систем автоматического управления/ Н.Т.Кузовков. - М.: Машиностроение,1966.- 483с.