

3.3 Математические модели отдельных звеньев системы
Для упрощения расчётов передаточная функция ЭМУ описывается апериодическим звеном первого порядка
![]() (3.34)
(3.34)
Так как постоянные времени свободного гироскопа, редуктора, потенциометра и электронных усилителей малы по сравнению с постоянными времени других элементов системы, то ими можно пренебречь, тогда их передаточные функции будут иметь вид
Wсг(s)=Kг
Wр(s)=Kр
Wп(s)=Kп (3.35)
Wэу1(s)=Kэу1
Wэу2(s)=Kэу2
3.4 Составление структурной схемы системы в целом
Имея функциональные схемы САУ и зная её передаточные функции, можно составить структурную схему.

Рисунок 4 — Структурная схема системы в целом
4 Синтез рулевого тракта системы автоматического управления и анализ удовлетворения заданным параметрам
Рассмотрим цепь рулевого тракта.
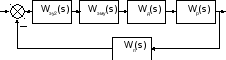
Рисунок 5 — Цепь рулевого тракта
Проверим рулевой тракт на устойчивость при условии, что коэффициент передачи электронного усилителя Кэу2=1. С помощьюSimulink построим переходный процесс
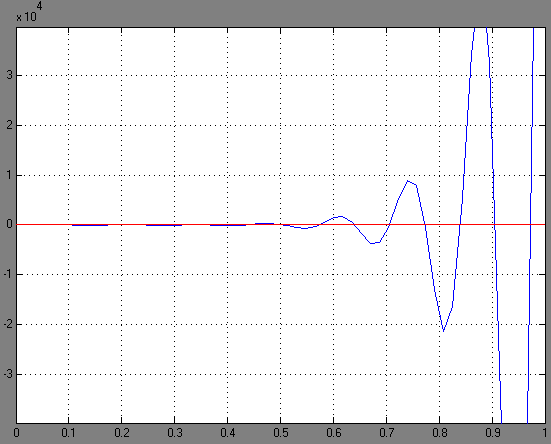
Рисунок 6 — Переходный процесс в рулевом тракте
По виду переходного процесса можно сказать, что рулевой тракт САУ имеет неустойчивую передаточную функцию и нуждается в коррекции.
Задача синтеза корректирующего звена решается в два этапа: задача точности (удовлетворение заданной скоростной ошибке) и задача качества (удовлетворение прямым показателям качества).
Так как прямая цепь рулевого имеет астатизм первого порядка, то коэффициент статической ошибки равен нулю, а коэффициент скоростной ошибки определится выражением
С1=1/К, (4.1)
где К=Кэу2КэмуКдКрКп— общий коэффициент усиления контура.
Здесь все коэффициенты, кроме Кэу2, изменению не подлежат, поэтому условие удовлетворения заданной скоростной ошибке будет иметь вид
Кэу2=1 / ( С1КэмуКдКрКп ), (4.2)
откуда
Кэу2=320/(0,003·2·3,5·1·1) = 15238
Для решения задачи качества применим метод ЛАЧХ, предложенный академиком Солодовниковым.
Метод применяется для систем, охваченных ЕООС. Разработаем и введём в прямую цепь рулевого тракта корректирующее звено, удовлетворяющее заданным по варианту прямым показателям качества. Объединим параметры прямой цепи, не подлежащие перенастройке, в передаточную функцию Wн(s) неизменяемой части и введём корректирующее звеноWкз(s):
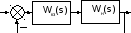
Рисунок 7 — Структурная схема рулевого тракта с корректирующим звеном
Здесь
![]() .
.
Построим ЛАЧХ неизменяемой части (см. приложение А). Для этого разложим Wн(s) на элементарные звенья:
1) К=333: 20lgK=51
2) 1/s:T1=1 ω1=1lgω1=0
3)1/(0.032s+1) T2=0.032 ω2=31.25 lg ω2=1.5
4)1/(0.06s+1)T3=0.06 ω3=16.7lgω3=1.22
Для построения желаемой ЛАЧХ используется номограмма Солодовникова [1]. В соответствии с заданным перерегулированием 25% Pmax=1,17, откуда, используя заданное время регулирования 0.85 с, можно определить частоты положительности и среза
ωп=3,8π/ 0.85=14
ωс=0.9 ωп=12.6
lgωc=1.1
Запас по амплитуде равен 20 дБ.
Через точку lgωcпроводится отрезок желаемой ЛАЧХ под наклоном -20дБ/дек в пределах ±20дБ. Высокочастотная часть ЛАЧХ строится их соображений удобства построения корректирующего звена, так как не влияет на качество переходного процесса, и поэтому она должна иметь вид, похожий на неизменяемую часть.
Так как задача точности в установившемся режиме решена в неизменяемой части системы, то желаемая и неизменяемая ЛАЧХ в области НЧ должны быть равны. Сопряжение производится фрагментами с наклоном, кратным 20 дБ/дек.
ЛАЧХ корректирующего звена строится из условия Lкз=Lж-Lн.
Для синтеза корректирующего звена нужно определить постоянные времени:
lgω1=0lgω2=1.22lgω3=1.5lgω4= –1.04lgω5=0.24lgω6=2.2
Т=10lg ω
T1=1 T2=0.06 T3=0.032 T4=11.1 T5=0.57 T6=0.006
![]()
Проверим систему на соответствие показателям качества.
Wпц(s) =Wкз(s) Wн(s)
![]()
![]()
С помощью Simulinkпостроим переходный процесс
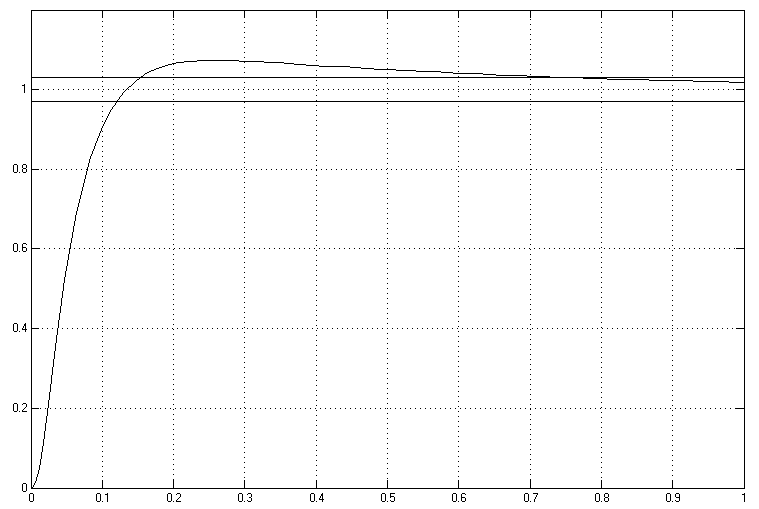
Рисунок 8 — Переходный процесс скорректированной цепи рулевого тракта
Из графика определим tp=0.77<0.85, σ%=7%<25% ; таким образом, перерегулирование и время регулирования меньше заданных, причём получившееся время регулирования отличается от заданного на 9% (<25%), что соответствует требованиям.