

5 Упрощённая техническая реализация корректирующего устройства в цепи рулевого тракта
Передаточная функция корректирующего звена состоит из трёх пассивных звеньев — двух интегрирующих и одного дифференцирующих. ЛАЧХ этих звеньев, приведённые на рисунке 8, в сумме дают ЛАЧХ корректирующего звена:
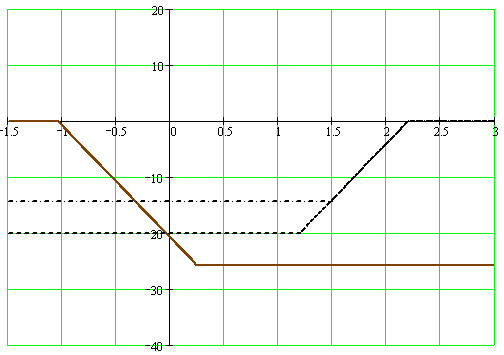
Рисунок 9 — ЛАЧХ звеньев, составляющих ЛАЧХ корректирующего звена
Реализация пассивного дифференцирующего звена имеет вид
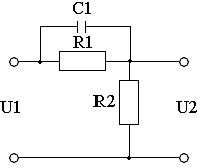
Рисунок 10 — Электрическая схема пассивного дифференцирующего звена
Параметры этого звена определяются соотношениями
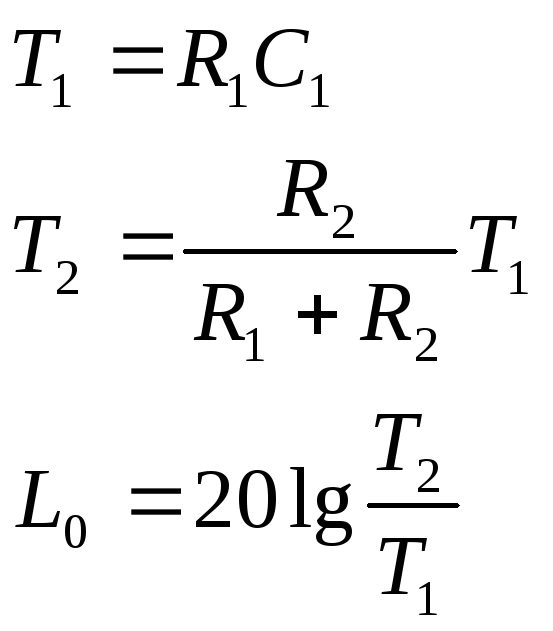 (5.1)
(5.1)
Реализация пассивного интегрирующего звена имеет вид
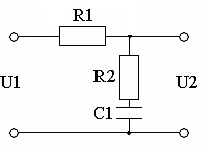
Рисунок 11 — Электрическая схема пассивного интегрирующего звена
Параметры этого звена определяются соотношениями
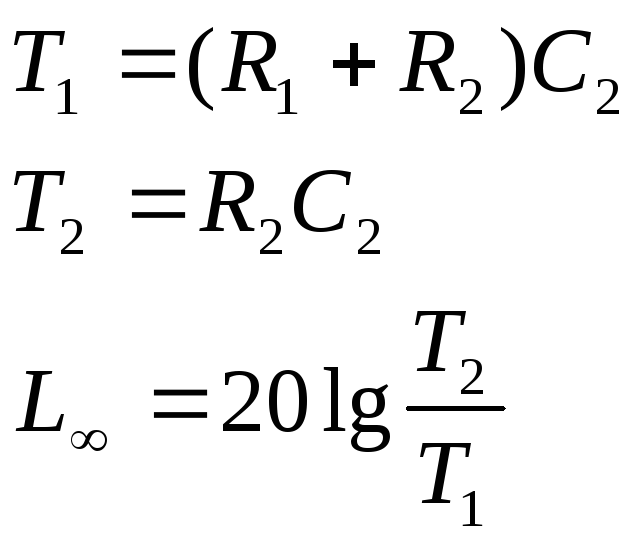 (5.2)
(5.2)
Для соединения звеньев используется операционный усилитель:
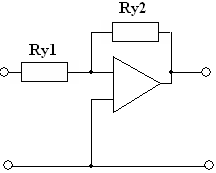
Рисунок 12 — Операционный усилитель
Коэффициент усиления операционного усилителя
![]() (5.3)
(5.3)
В приложении Б приведена электрическая схема корректирующего звена.
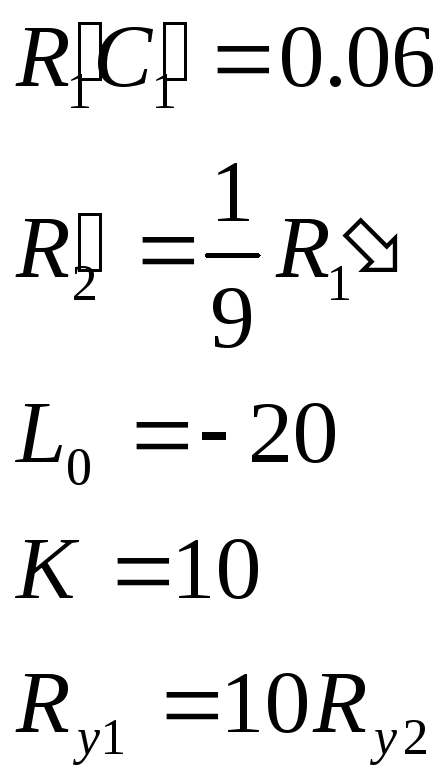
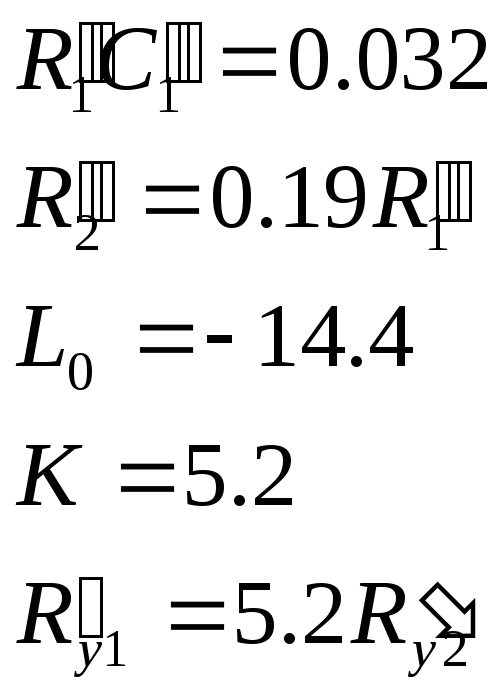
Используя соотношения (5.1), (5.2) и (5.3) и зная постоянные времени звеньев, определим, как взаимосвязаны электрические параметры:
(R1+R2)C2=11.1
R2C2=0.57
![]()
 (5.4)
(5.4)
6 Д-разбиение по коэффициенту передачи электронного усилителя
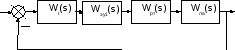
Рисунок 13 — Структурная схема САУ
ЭУ1 во внешнем контуре выполняет роль пропорционального регулятора положения. С помощью Д‑разбиения выделим интервалы изменения коэффициента усиления Кэу1, при котором система «самолёт+автопилот» будет оставаться устойчивой.
Обозначим КгWртWла=B(s) /A(s), гдеB(s) иA(s) — полиномы числителя и знаменателя. С учётом этого передаточная функция замкнутой системы «самолёт+автопилот»
![]() (6.1)
(6.1)
Характеристическое уравнение
![]() , (6.2)
, (6.2)
откуда
![]() (6.3)
(6.3)
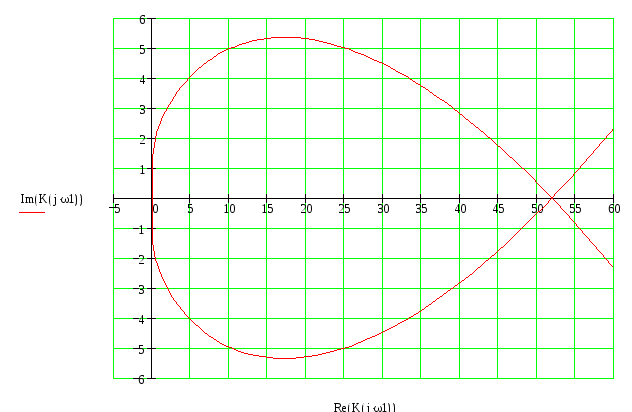
Построим годограф Д‑разбиения, нанесём на него штриховку слева по возрастанию частоты и выделим на нём три области: I— вся в штриховке,II— нет штриховки,III— штриховка и присутствует, и отсутствует. ОбластьIотличается наименьшим количеством правых корней и является областью‑претендентом на устойчивость.
 а)
а)
б)
Рисунок 14 — Годограф Д‑разбиения
Коэффициент усиления — вещественное число, поэтому на действительной оси выберем наилучшее значение Кэу1из областиI, то есть в интервале от 0 до 52, и в качестве критерия будем рассматривать показатели качества переходного процесса. Для оценки области по допустимой колебательности построим АЧХ замкнутой системы Кэу1должен лежать в таких пределах, чтобы выполнялось условие Аmax/A0<1.3:

Рисунок 15 — АЧХ замкнутой системы при Кэу2=5.1
Система удовлетворяет требованиям по колебательности при условии, что Кэу2принадлежит области от 0 до 5.1.
а)
б)
в)
г)
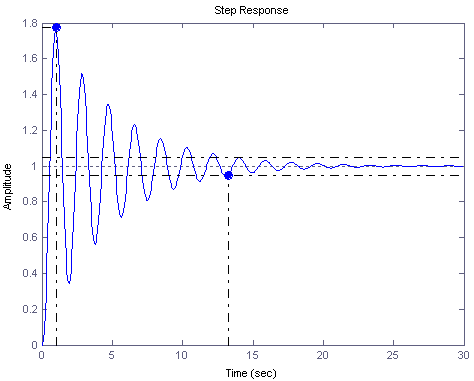
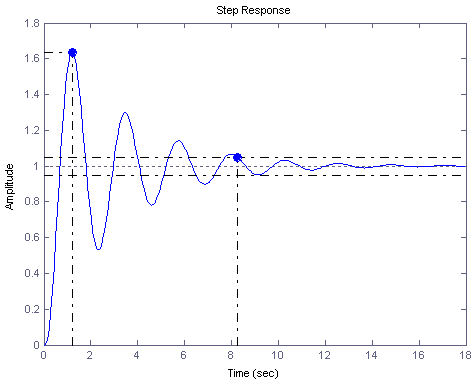
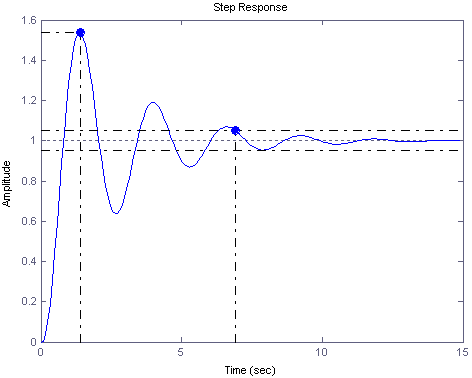
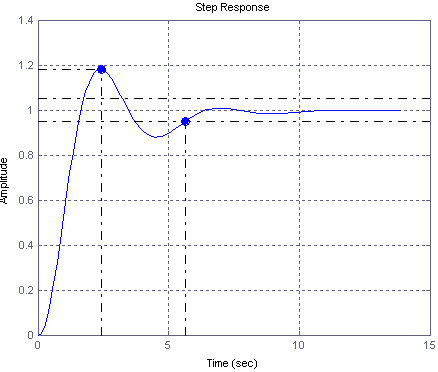
Рисунок 16 — Переходный процесс САУ «самолёт+автопилот» при коэффициенте усиления Кэу1а) 30; б) 20; в)15; г) 5
Из графиков видно, что переходный процесс на рисунке 14г наиболее приемлим. Его показатели качества — время регулирования tр=5.64с, перерегулированиеσ=18.1%, колебательность равна 1.
Таким образом, выбран Кэу1=5.
7 Анализ влияния нелинейности на динамические свойства системы автоматического управления
В цепи рулевого тракта присутствует нелинейность типа насыщение. Этот нелинейный элемент НЭ учитывает тот факт, что угол поворота пера руля ограничен стопорами.

Рисунок 17 — Статический нелинейный элемент типа насыщение
Чтобы исследовать влияние НЭ на свойства САУ, структурную схему нужно преобразовать к виду

Рисунок 18 — Преобразованная для анализа схема САУ
САУ с включённой в рулевой тракт нелинейностью имеет вид

Рисунок 19 — САУ с включённой в рулевой тракт нелинейностью
После переноса сумматоров вперёд и последней точки ветвления назад интересующая нас часть схемы примет вид
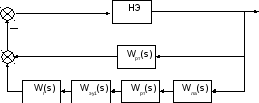
Рисунок 20 — Приведённая структурная схема САУ
Передаточная функция линейной части
Wлч(s)=Wрт(s)(1+Wг(s)Wэу1(s)Wла(s)) (7.1)
Wлч(s)=____ ![]() _______
_______
![]()
Суть метода гармонического баланса заключается в том, что нелинейное выражение заменяется выражением :
![]() , (7.2)
, (7.2)
которое с точностью до высших гармоник аналогично линейному.
Согласно методу гармонического баланса проведем замену нелинейной части на
![]() (7.3)
(7.3)
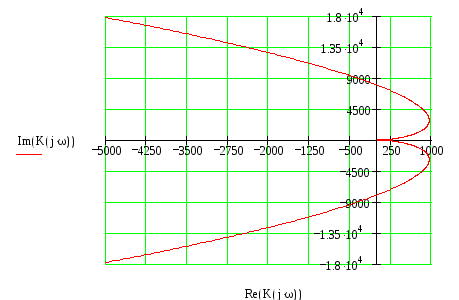
Построим на комплексной плоскости годограф линейной части и обратную характеристику нелинейного звена
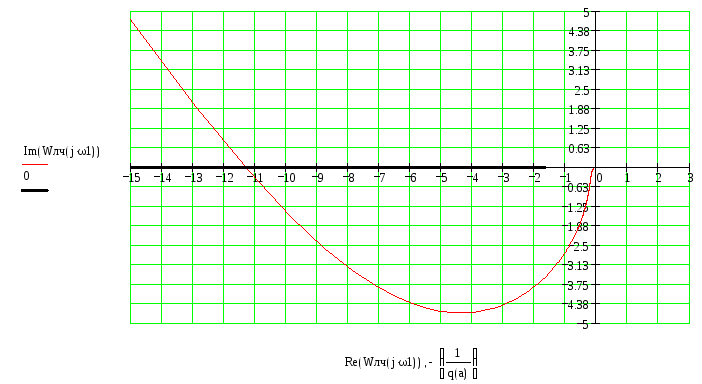
Рисунок 21 — Характеристики линейной и нелинейной частей
Определив в точке пересечения а и ω, получим, что амплитуда автоколебаний равна 14.4, частота автоколебаний равна 1.49