

1 Краткое описание целей функционирования и принципов работы исследуемой системы автоматического управления
В настоящей курсовой работе рассматривается система автоматической стабилизации углового положения летательного аппарата в горизонтальной плоскости (автопилот). Автопилот предназначен для автоматического поддержания заданного направления полёта. В состав системы входят объект управления — летательный аппарат, измерительно-преобразовательное устройство — свободный гироскоп, усилительное устройство — электронный усилитель, рулевой тракт — система управления приводом руля.
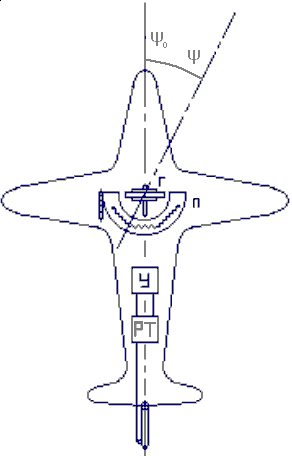
Рисунок 1 — Система «самолёт + автопилот»
Задаётся значение курса ψ0— угол между базовой линией начала отсчёта и заданным направлением. Под влиянием внешнего воздействия (воздушные ямы, ветер, асимметрия корпуса) летательный аппарат может отклоняться от заданного курса так, что угол между базовой линией и продольной осью летательного аппарата составит угол ψ, отличный от ψ0. На это изменение реагирует свободный гироскоп Г, с его измерительного потенциометра П снимается напряжение, это напряжение усиливается с помощью электронного усилителя У и подаётся на рулевой тракт РТ. Под действием напряжения перо руля отклоняется в соответствующую сторону.
2 Функциональная схема исследуемой систем автоматического управления
САУ предназначена для автоматического поддержания заданного курса. В состав системы входят: объект управления - летательный аппарат (ЛА), измерительно-преобразовательное устройство - свободный гироскоп (СГ), усилительное устройство - электронный усилитель (ЭУ), рулевой тракт - система управления приводом руля (РТ). Функциональная схема системы автоматической стабилизации летательного аппарата по курсу приведена на рисунке 2.

![]() Рисунок
2 — Функциональная схема системы
автоматической стабилизации летательного
аппарата по курсу
Рисунок
2 — Функциональная схема системы
автоматической стабилизации летательного
аппарата по курсу
На рисунке 2 приняты следующие обозначения:
o(t) — заданное значение для курса (угол между заданным направлением полета и базовой линией начала отсчета);
(t) — текущее значение углового положения продольной оси ЛА;
UП(t) — напряжение, снимаемое с измерительного потенциометра свободного гироскопа;
UЭУ1(t) — выходное напряжение электронного усилителя ЭУ1;
(t) — текущее значение угла поворота руля летательного аппарата;
(t) — возмущение, действующее на летательный аппарат (ветер, асимметрия планера и др.).
Рулевой тракт представляет собой силовой следящий привод руля и предназначен для отклонения пера руля на угол, зависящий от выходного сигнала электронного усилителя ЭУ1 (то есть сигнала, пропорционального сигналу с гироскопа). В состав рулевого тракта входят:
–редуктор, выходной вал которого соединен с пером руля (Р);
–исполнительный двигатель — электрический двигатель постоянного тока с независимым возбуждением (ИД);
–усилитель напряжения — электронный усилитель (ЭУ2);
–усилитель мощности — электронный усилитель с короткозамкнутой обмоткой (ЭМУ);
–измерительный элемент — потенциометрический датчик углового положения пера руля (П).
Функциональная схема рулевого тракта приведена на рисунке 3.

Рисунок 3 — Функциональная схема рулевого тракта летательного аппарата
На рисунке 2 приняты следующие обозначения:
Р(t) — текущее значение угла поворота пера руля;
Uп(t) — напряжение, снимаемое с потенциометрического датчика углового положения пера руля;
UЭУ1(t) — выходное напряжение электронного усилителя ЭУ1;
UЭУ2(t) — выходное напряжение электронного усилителя ЭУ2;
U(t) — сигнал рассогласования, поступающий на управляющую обмотку ЭМУ;
UЭМУ(t) — выходное напряжение ЭМУ;
Д(t) — текущее значение угла поворота вала двигателя ИД.