

3.3 Определение операторной передаточной функции и постоянных времени последовательного корректирующего устройства.
Для того, чтобы определить ЛАХ последовательного корректирующего устройства, из ординат желаемой ЛАХ вычитаются ординаты ЛАХ нескорректированной системы, то есть:
![]()
Вычитание ЛАХ производится графически. Из полученного графического изображения ЛАХ последовательной коррекции определяется ее передаточная функция:
 ,
где
,
где
Реализовать последовательное корректирующее устройство с данной передаточной функцией вполне возможно, так как степени числителя и знаменателя равны 4.
Определим место последовательного корректирующего устройства:

Рисунок 10 – Структурная схема САУ с последовательным КУ
Найдем ПФ скорректированной САУ:

Построим ФЧХ скорректированной САУ, используя программуMathLAB7.3.0. Алгоритм ввода данных имеет следующий листинг:
>> k=192.308
k=
192.3080
>> Ta=7.246
Ta=
7.2460
>> T8=0.002
T8 =
0.0020
>> Tv=3.257
Tv =
3.2570
>> T7=1.618
T7 =
1.6180
>> tau=0.007
tau =
0.0070
>>w1=tf([k*Tv*T7,Tv*k+k*T7,k+12*k*Tv*T7/tau^2,12*Tv*k/tau^2+12*T7*k/tau^2-6*k*Tv*T7/tau,12*k/tau^2-6*Tv*k/tau+6*T7*k/tau,-6*k/tau],[Ta^2*T8^2,2*T8*Ta^2+2*Ta*T8^2,Ta^2+T8^2+4*Ta*T8+12*Ta^2*T8^2/tau^2,2*Ta+2*T8+6*Ta^2*T8^2/tau+24*T8*Ta^2/tau^2+24*Ta*T8^2/tau^2,1+12*T8*Ta^2/tau+12*Ta*T8^2/tau+12*Ta^2/tau^2+12*T8^2/tau^2+48*Ta*T8/tau^2,6*Ta^2/tau+6*T8^2/tau+24*Ta*T8/tau+24*Ta/tau^2+24*T8/tau^2,12*Ta/tau+12*T8/tau+12/tau^2,6/tau,0])
Transfer function:
1013 s^5 + 937.5 s^4 + 2.482e008 s^3 + 2.287e008 s^2 + 4.683e007 s- -1.648e005
--------------------------------------------------------------------------------------------
0.00021 s^8 + 0.2101 s^7 + 104 s^6 + 5.146e004 s^5 + 1.287e007 s^4 +3.595e006s^3 + 2.573e005 s^2 + 857.1 s
>> margin(w1);grid
Имеем следующие данные:
|
|
|
|
|
-1.01 |
0.0969 |
-494 |
|
-0.76 |
0.173 |
-512 |
|
-0.56 |
0.272 |
-517 |
|
-0.38 |
0.413 |
-513 |
|
-0.13 |
0.737 |
-497 |
|
0.12 |
1.32 |
-480 |
|
0.37 |
2.35 |
-468 |
|
0.62 |
4.19 |
-461 |
|
0.87 |
7.49 |
-457 |
|
1.13 |
13.4 |
-456 |
|
1.25 |
17.9 |
-456 |
|
1.5 |
31.9 |
-459 |
|
1.75 |
56.9 |
-464 |
|
2 |
100 |
-473 |

Рисунок 11 – ЛАХ и ЛФХ скорректированной САУ
3.4 Определение операторной передаточной функции и постоянных времени корректирующей обратной связи.
Корректирующая обратная связь (в дальнейшем КОС) позволяет скорректировать систему путем охвата обратной связью с определенными звеньями некоторой части системы (или всей системы). Принципиальный вид структурной схемы с КОС следующий:
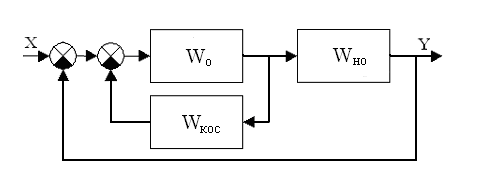
Рисунок 12 – Общий вид схемы с КОС
Для дальнейшего определения ЛАХ КОС запишем следующее условие:
![]()
Таким
образом, сначала необходимо из ЛАХ
нескорректированной системы отнять
желаемую ЛАХ и из этой разности, отняв
ЛАХ охватываемой части найти ЛАХ КОС,
то есть:
![]() .
.
Охватим регулятор корректирующей обратной связью. Схема имеет вид:
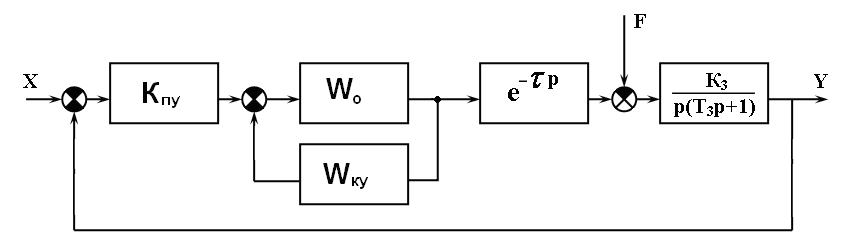
Рисунок 13 – Структурная схема САУ с КОС
Охваченная часть будет представлять собой два инерционных звена и одно форсирующее звено, то есть:

В итоге получаем:
![]() ,
где
,
где
ЛАХ
данного охваченного участка, проходит
через точку
![]() на оси ординат с наклоном
на оси ординат с наклоном
![]() ,
затем в точке
,
затем в точке
![]() (по
логарифмической шкале
(по
логарифмической шкале
![]() )
она претерпевает излом на
)
она претерпевает излом на
![]() ,
что и характерно для инерционного звена.
Далее в точке
,
что и характерно для инерционного звена.
Далее в точке
![]() (по
логарифмической шкале
(по
логарифмической шкале
![]() )
она выравнивается на
)
она выравнивается на![]() ,
и в точке
,
и в точке
![]() (по логарифмической шкале
(по логарифмической шкале
![]() )
она снова ломается на
)
она снова ломается на![]() .
.
Желаемую
ЛАХ в низкочастотной области при
![]() оставим под наклоном
оставим под наклоном![]() ,
а при
,
а при![]() сломаем на
сломаем на![]() ,
на высокочастотной области оставим
желаемую ЛАХ под наклоном
,
на высокочастотной области оставим
желаемую ЛАХ под наклоном![]() ,
то есть не будем ломать ее как в предыдущем
случае для последовательного КУ на
,
то есть не будем ломать ее как в предыдущем
случае для последовательного КУ на![]() .
При этом изменится ее передаточная
функция и ФЧХ.
.
При этом изменится ее передаточная
функция и ФЧХ.
Передаточная функция желаемой ЛАХ для КОС будет выглядеть следующим образом:

Для построения ФЧХ воспользуемся программой MathLAB7.3.0. Алгоритм ввода данных имеет следующий листинг:
>> Ta=12.7
Ta =
12.7000
>> Tv=5.52
Tv =
5.5200
>> k=192.308
k =
192.3080
>> w=tf([k*Tv^2,2*Tv*k, k],[Ta^2,2*Ta,1,0])
Transfer function:
5860 s^2 + 2123 s + 192.3
-------------------------
161.3 s^3 + 25.4 s^2 + s
>> bode(w)
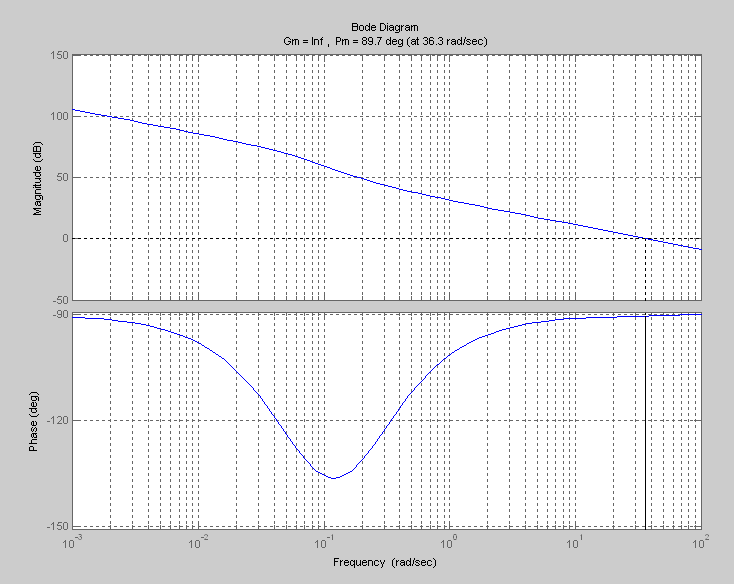
Рисунок 14 – желаемаяЛАХ и ЛФХдля КОС
ФЧХ не пересекает линию -, следовательно имеется бесконечный запас устойчивости по фазе.
Определив
желаемую ЛАХ и отняв последовательно
из ЛАХ нескорректированной системы
желаемую ЛАХ и от этой разницы ЛАХ
охваченной части в соответствии с
формулой
![]() ,
получаем ЛАХ корректирующей обратной
связи. Передаточная функция КОС:
,
получаем ЛАХ корректирующей обратной
связи. Передаточная функция КОС:
 .
.
Степень числителя равна 2, степень знаменателя – 3, следовательно,
реализация такого устройства возможна.
Найдем ПФ и построим ФЧХ скорректированной САУ. Передаточная функция будет иметь вид (исходя из рисунка 13):
![]()
Для построения ФЧХ воспользуемся программой MathLAB7.3.0. Алгоритм ввода данных имеет следующий листинг:
>> Ta=12.7
Ta =
12.7000
>> Tv=5.52
Tv =
5.5200
>> T=0.16
T =
0.1600
>> T7=1.618
T7 =
1.6180
>> T3=0.2
T3 =
0.2000
>> T8=0.002
T8 =
0.0020
>> kpu=7.122
kpu =
7.1220
>> k3=3
k3 =
3
>> k1=9
k1 =
9
>> kos=0.112
kos =
0.1120
>> tau=0.007
tau =
0.0070
w3=tf([kpu*k3,0,12*kpu*k3/tau^2,-kpu*k3*6/tau],[T3,1,12*T3/tau^2,6*T3/tau+12/tau^2,6/tau,0])
Transfer function:
21.37 s^3 + 5.232e006 s - 1.831e004
-------------------------------------------------------
0.2s^5+s^4+4.898e004s^3+2.451e005s^2+857.1s
w2=tf([kos*Ta^2,2*kos*Ta,kos],[T3*Tv^2,Tv^2+2*Tv*T3,2*Tv+T3,1])
Transfer function:
18.06 s^2 + 2.845 s + 0.112
-----------------------------------
6.094 s^3 + 32.68 s^2 + 11.24 s + 1
w1=tf([k1*T,k1],[T7*T8,T7+T8,1])
Transfer function:
1.44 s + 9
-------------------------
0.003236 s^2 + 1.62 s + 1
>> w4=w3*w1/(1+w1*w2)
Transfer function:
0.6067 s^9 + 310.8 s^8 + 1.523e005 s^7 + 7.612e007 s^6 + 9.147e008 s^5 + 3.162e009 s^4 + 2.482e009 s^3 + 6.044e008 s^2 + 4.495e007 s - 1.648e005
--------------------------------------------------------------------------------------------
1.276e-005 s^12 + 0.01291 s^11 + 6.482 s^10 + 3208 s^9 + 8.222e005 s^8 + 1.131e007 s^7 + 5.785e007 s^6 + 1.211e008 s^5 + 7.108e007 s^4 + 1.06e007 s^3 + 5.28e005 s^2 + 1721 s
>> margin(w4);grid
Имеем следующие данные:
|
|
|
|
|
-1.01 |
0.0976 |
-479 |
|
-0.78 |
0.166 |
-485 |
|
-0.63 |
0.233 |
-483 |
|
-0.38 |
0.415 |
-477 |
|
-0.13 |
0.741 |
-473 |
|
-0.004 |
0.99 |
-474 |
|
0.25 |
1.77 |
-480 |
|
0.49 |
3.15 |
-495 |
|
0.75 |
5.63 |
-513 |
|
1 |
10 |
-527 |
|
1.25 |
17.9 |
-535 |
|
1.5 |
32 |
-540 |
|
1.76 |
57.1 |
-545 |
|
2 |
100 |
-550 |
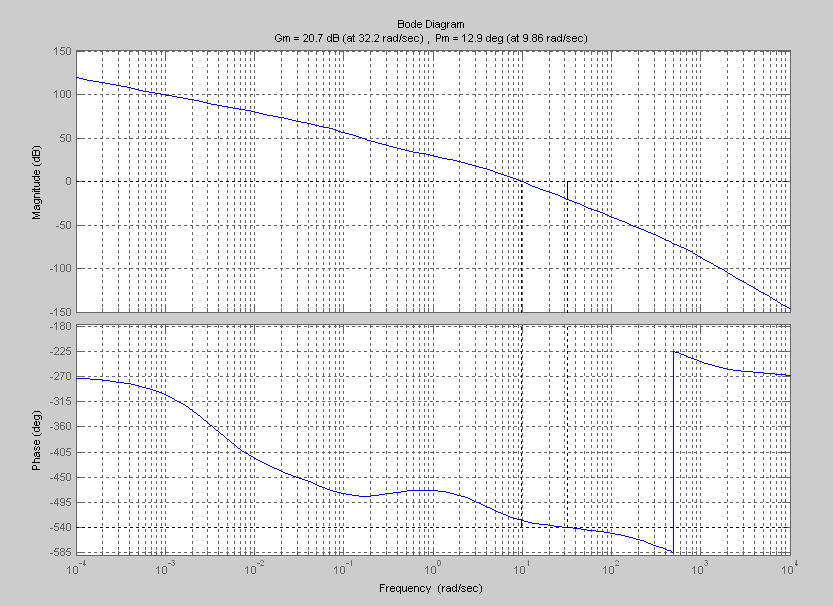
Рисунок 14.1 – ЛАХ и ЛФХ скорректированной САУ