

2.6 Выводы по анализу устойчивости сау.
Так как разомкнутая САУ имеет один интегратор, но все остальные корни знаменателя «левые», то разомкнутая САУ находится на границе устойчивости.
В характеристическом полиноме замкнутой САУ все коэффициенты строго больше 0, следовательно, выполняется необходимое условие устойчивости САУ. Является ли она устойчивой можно судить по критериям Раусса и Найквиста.
Алгебраический критерий. В таблице Раусса, как было установлено, один из коэффициентов первого столбца имеет отрицательное значение, что говорит о том, что САУ неустойчива. Поэтому исходя из этого критерия, можно уже утверждать, что система в замкнутом состоянии неустойчива.
Критерий Найквиста так же подтверждает неустойчивость замкнутой САУ. Так как АФХ разомкнутой системы охватывает критическую точку (-1;j0). Построение диаграммы Боде подтвердило неустойчивость системы.
Чтобы
судить о влиянии коэффициента усиления
на устойчивость была построена кривая
D-разбиения.
Диаграмма показала, что для обеспечения
устойчивости коэффициент усиления
должен быть меньше
![]() .
Это невозможно, так как такой коэффициент
усиления не обеспечит требуемой
статической точности.
.
Это невозможно, так как такой коэффициент
усиления не обеспечит требуемой
статической точности.
Поэтому для обеспечения устойчивости необходимо ввести корректирующие динамические звенья.
3. Синтез исходной сау.
3.1 Выбор и обоснование методов синтеза сау.
В теории автоматического управления одними из самых объемных задач являются задачи синтеза автоматических систем. В них требуется определить структуру и параметры системы по заданным показателям качества. Синтез является важнейшим этапом проектирования и конструирования систем. Существует ряд методов синтеза корректирующих устройств. Они различаются по сложности и по разнообразию исходных данных и требований. Какого-либо универсального метода синтеза не существует. Для определенной задачи с определенными показателями может более удачно подходить метод, который для другой задачи не является лучшим.
Метод синтеза САУ, использующий ЛАЧХ, наиболее прост и широко распространен, так как само построение логарифмических амплитудно-частотных характеристик не столь сложно.
3.2 Расчет и построение желаемой лах и лфх.
Построение желаемой ЛАХ и ЛФХ осуществим поэтапно:
1.
Определим частоту среза ![]() .
Частота среза зависит от времени
регулирования
.
Частота среза зависит от времени
регулирования
![]() :
:
![]() .
.
Коэффициент
k
зависит
от перерегулирования
![]() .
Из графика (Куропаткин П.В. Теория
автоматического управления) при
перерегулировании
.
Из графика (Куропаткин П.В. Теория
автоматического управления) при
перерегулировании![]() коэффициентk=2,4.
коэффициентk=2,4.
.
2. Частота среза желаемой ЛАХ равна:
![]()
![]()
3.
Наклон асимптоты желаемой ЛАХ в районе
частоты среза выбираем равным
![]() .
Эта прямая будет среднечастотной
асимптотой желаемой ЛАХ.
.
Эта прямая будет среднечастотной
асимптотой желаемой ЛАХ.
4. Определяем запас устойчивости по амплитуде желаемой ЛАХ в соответствии с перерегулированием:
для
![]()
![]() ,
,![]() .
.
Значения
![]() и
и![]() откладывают параллельно оси 0дБ.
откладывают параллельно оси 0дБ.
5.
Низкочастотная асимптота желаемой ЛАХ
должна совпасть с исходной нескорректированной
ЛАХ. Чтобы она совпала как можно быстрее,
низкочастотная часть желаемой ЛАХ
ломается относительно среднечастотной
части на
![]() при частоте
при частоте![]() ,
то есть получается наклон
,
то есть получается наклон![]() ,
при частоте
,
при частоте![]() ломаем ещё на
ломаем ещё на![]() ,
то есть получается наклон
,
то есть получается наклон![]() .
В точке, где желаемая ЛАХ достигает
низкочастотную часть исходной при
.
В точке, где желаемая ЛАХ достигает
низкочастотную часть исходной при![]() (
(![]() ),
ломаем на
),
ломаем на![]() низкочастотную
часть желаемой ЛАХ для полного их
совпадения.
низкочастотную
часть желаемой ЛАХ для полного их
совпадения.
6.
В точке
![]() ломаем ЛАХ на
ломаем ЛАХ на![]() для совпадения наклона с наклоном
высокочастотной области исходной ЛАХ.
В сумме имеем
для совпадения наклона с наклоном
высокочастотной области исходной ЛАХ.
В сумме имеем![]() .
.
7.
По построенной желаемой ЛАХ определим
ее передаточную функцию:![]()

Раскрыв
скобки, получим:
8. Для построения ФЧХ воспользуемся программой MathLAB7.3.0 Алгоритм ввода данных имеет следующий листинг:
>> k=192.308
k =
192.3080
>> Ta=7.246
Ta =
7.2460
>> T8=0.002
T8 =
0.0020
>> T7=1.618
T7 =
1.6180
>> Tv=3.257
Tv =
3.2570
>>w1=tf([k*Tv*T7,Tv*k+T7*k,k],[Ta^2*T8^2,2*Ta^2*T8+2*Ta*T8^2,Ta^2+4*Ta*T8+T8^2,2*Ta+2*T8,1,0])
Transfer function:
1013 s^2 + 937.5 s + 192.3
---------------------------------------------------
0.00021 s^5 + 0.2101 s^4 + 52.56 s^3 + 14.5 s^2 + s
>> margin(w1);grid
Имеем следующие данные:
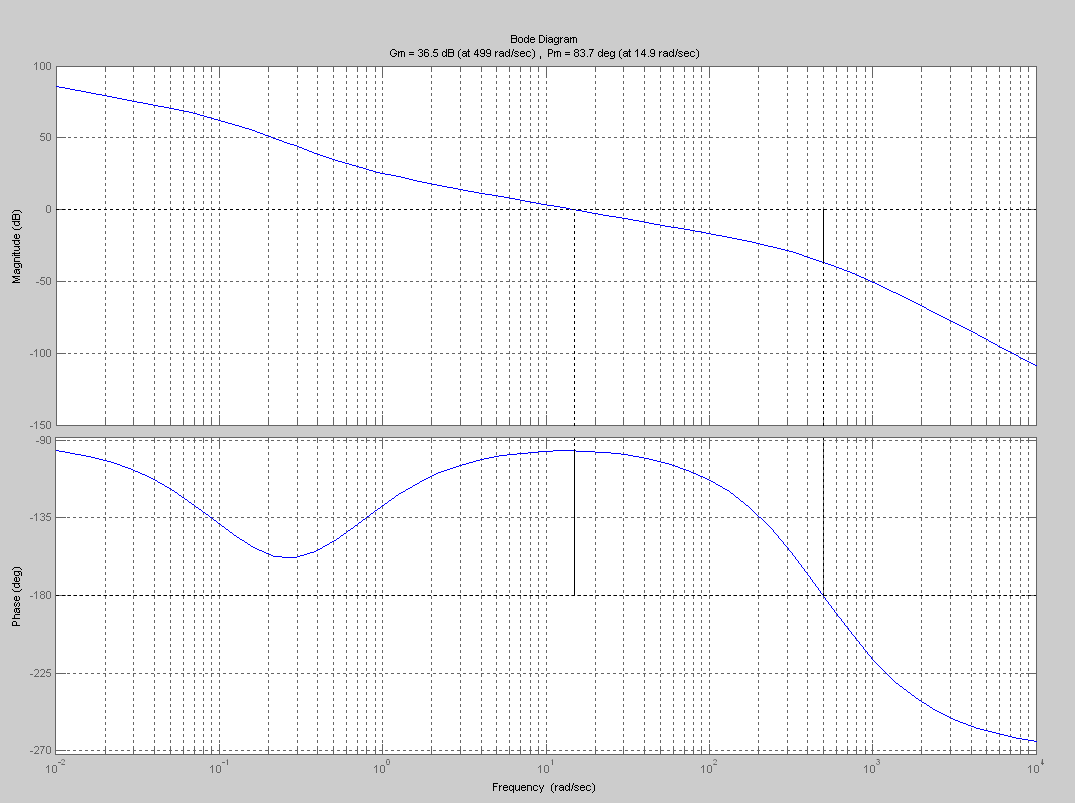
Рисунок 9 – желаемая ЛАХ и ЛФХ