

1.8. Порядок выполнения лабораторной работы №2.
Цели работы: изучить способы формального описания работы комбинационных схем средней степени интеграции: шифраторов, дешифраторов, сумматоров и способов их моделирования.
Для этого: составить таблицы истинности для трёхразрядного двоичного дешифратора и одноразрядного сумматора двоичных чисел, записать законы функционирования в СДНФ и промоделировать их работу в среде LabVIEW. При составлении таблицы истинности для сумматора следует учитывать возможность переноса 1 из младшего разряда.
Отчёт о проделанной работе должен включать таблицы истинности, все алгебраические преобразования переключательных функций и схемы всех экспериментов в среде LabVIEW .
Глава 2. Первый уровень иерархии систем автоматизации и управления – элементы памяти Лабораторная работа №3. Изучение принципов работы элементов памяти
2.1 Элементы памяти.
Для описания законов функционирования элементов памяти и устройств, работающих на их основе используется теория конечных автоматов [5,25]. Элемент памяти является элементарным автоматом, имеющим два устойчивых состояния, кодируемых 0 и 1. Работа элементарного автомата осуществляется в дискретные моменты времени (такты). Соседние такты обозначаются символами (t) и (t+1). Алгоритм его работы задаётся таблицей переходов (табл. 2.1), определяющей зависимость переходов элементарного автомата из состояния Q(t)в такте t в состояние Q(t+1) в такте t+1 в зависимости от значений входных сигналов X(t).
Таблица 2.1

|
X1(t) |
X2(t) |
Q(t) |
Q(t+1) |
|
0 |
0 |
0 |
– |
|
0 |
0 |
1 |
– |
|
0 |
1 |
0 |
1 |
|
0 |
1 |
1 |
1 |
|
1 |
0 |
0 |
0 |
|
1 |
0 |
1 |
0 |
|
1 |
1 |
0 |
0 |
|
1 |
1 |
1 |
1 |
Рис.2.1. Схема бистабильной ячейки (триггера) и таблица переходов.
Сначала построим схему бистабильной ячейки (триггера), которая может находиться в двух устойчивых состояниях, на логических элементах И – НЕ (рис. ). Для этого триггера активным является сигнал нулевого уровня. Поэтому состояние входов X1(t) = 0 и X2(t) = 0, которое приводит к появлению на обоих выходах сигнала 1, называется запрещённым, а состояние выхода Q(t+1) называется неопределённым. Состояние входов X1(t) = 0, X2(t) =1 переводит триггер в состояние 1, независимо от предыдущего состояния, а состояние входов X1(t) = 1, X2(t) =0 – в состояние 0. Если же X1(t) = 1 и X2(t) =1, то триггер сохраняет предыдущее состояние (табл. 2.1).
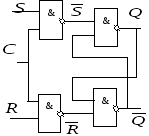
Таблица 2.2
|
S(t) |
R(t) |
Q(t) |
Q(t+1) |
|
0 |
0 |
0 |
0 |
|
0 |
0 |
1 |
1 |
|
0 |
1 |
0 |
0 |
|
0 |
1 |
1 |
0 |
|
1 |
0 |
0 |
1 |
|
1 |
0 |
1 |
1 |
|
1 |
1 |
0 |
– |
|
1 |
1 |
1 |
– |
Рис.2.2. Схема и таблица переходов SR-триггера, тактируемого потенциалом.
В
реальных схемах триггеров изменение
состояния происходит в фиксированные
моменты времени, определяемые сигналом
на тактовом входе C.
Схема и таблица переходов такого триггера
приведены на рис.2.2. В этом триггере
изменение состояния возможно только
при единичном значении сигнала на входе
синхронизации С. Теперь для установки
триггера в единичное состояние
необходимо, чтобы S(t) = 1, R(t) = 0, а для
установки в нулевое состояние - S(t) = 0,
R(t) = 1. Состояние входов S(t) = 1, R(t) = 1 является
запрещённым, а состояние выхода
триггера Q(t+1) при этом не определено.
Такой элементарный автомат называют
S-R триггером, тактируемым потенциалом.
Обозначение входов S
и R
происходит от английских слов Set
– установить и Reset
– переустановить. В некоторых случаях
необходимо, чтобы триггер срабатывал
в строго определённый момент времени,
например в момент изменения уровня
синхросигнала, Такой триггер называется
триггером, тактируемым фронтом (перепад
0 – 1) или срезом (перепад 1 – 0) синхроимпульса.
Схема SR
триггера, тактируемого срезом, приведена
на рисунке 2.3. Работает триггер следующим
образом. В момент установки С входа в
состояние 1 сигналы со входов S
и R
записываются в первую бистабильную
ячейку и поступают на входы второй. Но
быть записанными во вторую ячейку они
не могут, так как на её входе синхронизации
установлен запрещающий нулевой уровень
сигнала
![]() .
При изменении сигнала синхронизации С
из 1 в 0, сигнал
.
При изменении сигнала синхронизации С
из 1 в 0, сигнал![]() примет значение 1 и информация будет
записана во вторую бистабильную ячейку.
При этом запись информации в первую
ячейку будет запрещена, и можно установить
новые значенияS
и R входов.
примет значение 1 и информация будет
записана во вторую бистабильную ячейку.
При этом запись информации в первую
ячейку будет запрещена, и можно установить
новые значенияS
и R входов.
![]()
![]()
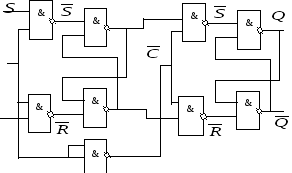
Рис.2.3. Схема SR триггера, тактируемого срезом (перепадом 1 – 0) синхросигнала
Триггер типа SR называется элементарным автоматом с двумя информационными входами. Существуют элементарные автоматы с одним информационным входом. Это элементарные автоматы типа Т (триггер со счётным входом, таб. 2.3) и D (триггер задержки, таб. 2.4). Их переходы отображены в следующих таблицах.
Таблица 2.3 Таблица 2.4
-
q(t)
Q(t)
Q(t+1)
0
0
0
0
1
1
1
0
1
1
1
0
q(t)
Q(t)
Q(t+1)
0
0
0
0
1
0
1
0
1
1
1
1
В этих таблицах q(t) – входной сигнал в момент времени t, Q(t) – состояние элементарного автомата в момент времени t, Q(t+1) – состояние элементарного автомата в момент времени t+1 (в следующем такте).
Триггер со счётным входом работает так: при подаче на вход сигнала 0 триггер не меняет своего состояния, а при подаче сигнала 1 – меняет состояние на противоположное, то есть считает до двух. В технических схемах t-триггер обычно реализуется на основе D-триггера или JK-триггера (рис.2.4).
У триггера задержки состояние автомата в момент времени Q(t+1) равно значению входа в момент времени q(t) , то есть повторяет значение входного сигнала с задержкой на 1 такт. Название D-триггер происходит от английского слова delay – задержка.
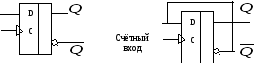
Рис.2.4. D-триггер и t-триггер, построенный на основе D-триггера
Разработан триггер с двумя информационными входами типа JK, для которого не существует запрещённого состояния входов. Если на его входы J (Jump) и K (Keep), соответствующие входам S и R предыдущего триггера, подать сигналы J=1 и K=1, то триггер изменит состояние на противоположное при подаче на вход С перепада 1 – 0. Такой переход позволяет из JK триггера получить триггер со счётным входом. Схема такого триггера представлена на рис. 2.5.
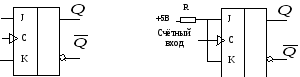
Рис.2.5. JK-триггер и t-триггер, построенный на основе JK-триггера