

3.2 Устройства связи с объектами (усо).
Устройства связи с объектами подразделяются на выходные и входные. Выходные модули предназначаются для коммутации исполнительных устройств в системах автоматизации и управления в цепях переменного и постоянного тока при управлении логическими сигналами. Модули УСО переменного тока выпускаются со схемой контроля перехода фазы питающего напряжения через ноль или без неё. Переключение нагрузки в момент перехода фазы через ноль позволяет снизить электромагнитные помехи в том числе и радиопомехи.
Входные модули используются в системах автоматизации и управления для сбора информации о состоянии нагрузок и органов управления. На выходе модуля формируется логический сигнал, высокий уровень которого соответствует отключённой нагрузке (датчик разомкнут), а низкий уровень – включённой нагрузке (датчик замкнут). Выход модуля – транзистор с открытым коллектором.
Условное обозначение модуля УСО.
 5П
И О АС
5 А-11
5П
И О АС
5 А-11
Тип корпуса (Г, И, Ж) Исполнение (А, А-11, В)
Тип модуля: О-выходной Номинальное входное напряжение [B]
I- входной (5, 15, 24)
Ток (АС – переменный, DC–
постоянный )
Схемы выходных модулей УСО приведены на рис. 3.2 и 3.3, а входных – на рис. 3.4 и 3.5.
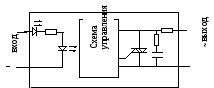
Рис.3.2. Выходной модуль переменного тока
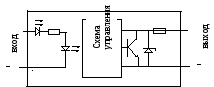
Рис.3.3. Выходной модуль постоянного тока

Рис.3.4. Входной модуль переменного тока





+
V
выход
GND


























Рис.3.5. Входнойоднополярный модульпостоянного тока
Исследование работы самих силовых модулей является сложной задачей, связанной с коммутацией тока и напряжения значительной величины. Поэтому при подборе такого элемента необходимо обращать особое внимание на то, чтобы значения рабочих параметров не превышали паспортных величин. Кроме того, в процессе управления возникают специальные задачи, связанные с динамическими характеристиками объекта. Так, при управлении скоростью вращения вала двигателя постоянного тока методом широтно-импульсной модуляции (ШИМ), необходимо правильно выбрать несущую частоту модуляции, и это обеспечивается программными методами настройки контроллера. Поэтому здесь мы рассмотрим только схему подключения нагрузки к источнику питания с помощью силового элемента электроники, управляемого контроллером. Контроллер должен включать и выключать нагрузку и управлять потребляемой мощностью с помощью сигнала с широтно-импульсной модуляцией (ШИМ сигнала).

Vнагр.
Элемент
силовой электроники
Рис 3.6 Схема подключения нагрузки к контроллеру через элемент силовой электроники
Как следует из приведённой схемы, для включения нагрузки необходимо открыть транзистор элемента силовой электроники. Это произойдёт при освещении светодиодом фотоприёмника схемы управления. С помощью оптопары производится гальваническая развязка силовой и сигнальной частей схемы. Для включения светодиода используются выводы порта В контроллера AT90S2313. Необходимо, чтобы на всех выводах был сигнал «логической 1». Вывод В5 используется для подачи команды ВКЛ/ВЫКЛ, вывод В4 – для команды ВПЕРЁД/НАЗАД, а вывод В3 используется для подачи ШИМ сигнала, регулирующего потребляемую мощность.
В дальнейших лабораторных исследованиях будет рассмотрена совместная работа объекта управления, электронного силового ключа и контроллера на примере системы защиты двигателя постоянного тока от перегрузки при увеличении момента сопротивления вращению вала. Однако это можно проделать после изучения устройств второго и третьего уровней иерархии систем автоматизации и управления. Изучение работы этих устройств следует проводить совместно с реальной нагрузкой, как показано на рис 3.6