

15) Звено запаздывания, его частотные и переходные характеристики
Звено
запаздывания входит в состав моделей
многих промышленных объектов управления
. Передаточная
функция звена запаздывания не является
дробно-рациональной, что затрудняет
теоретический анализ свойств системы.
Звено запаздывания
с хорошей степенью приближения может
быть вынесено за пределы контура САР.
Физический смысл этого представления
состоит в том, что инерционно-колебательные
свойства и чистое запаздывание контура
разделены и могут рассматриваться
отдельно. Входной сигнал последовательно
преобразуется инерционной частью и
звеном запаздывания. Последовательность
этих процессов может быть произвольной.
Инерционная часть (дробно-рациональная)
формирует фронт переходного процесса,
а звено запаздывания устанавливает
правильную задержку.
Линейной
системой с запаздыванием называется
такая, которая содержит в своей структуре
хотябы одно звено, в котором есть
неизменное запаздывание во времени τ
изменения выходной координаты после
начала изменения входной .
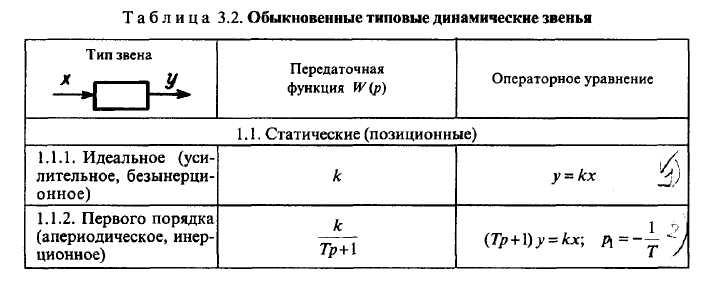
Инерционное
звено первого порядка (апериодическое)
- Уравнение
динамики:
Tpy + y = ku.Передаточная
функция: W(p)
=
![]() .
Переходная
характеристика может быть получена с
помощью формулы Хевисайда:
.
Переходная
характеристика может быть получена с
помощью формулы Хевисайда:
![]() Инерционные
звенья второго порядка:Его
уравнение: T12p2y
+ T2py
+ y = ku. Передаточная
функция:
Инерционные
звенья второго порядка:Его
уравнение: T12p2y
+ T2py
+ y = ku. Передаточная
функция:
W(p)
=
![]()
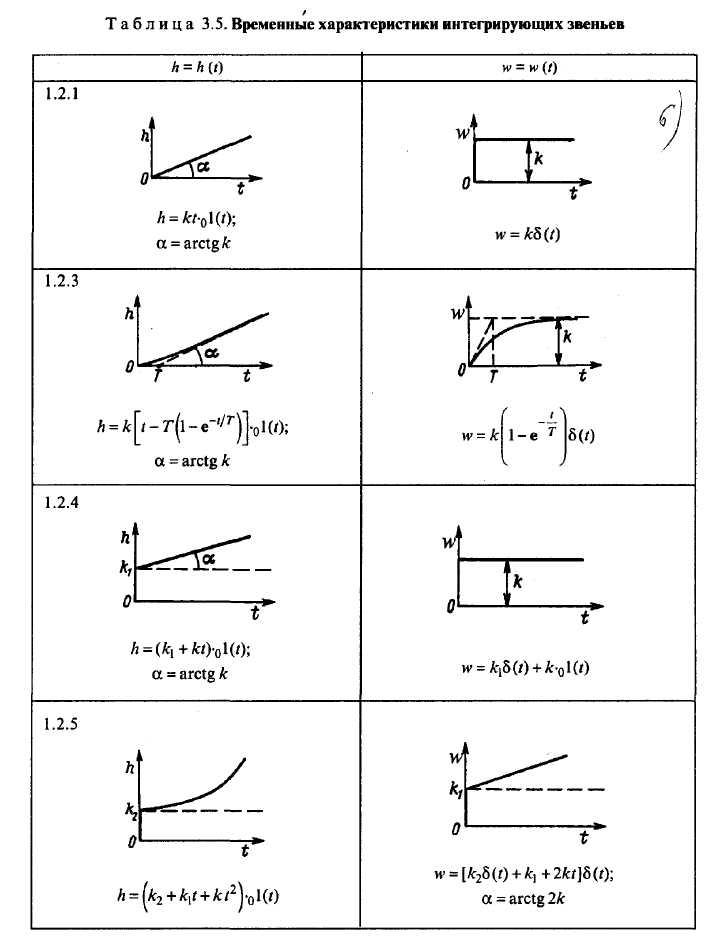
12. Интегрирующие и апериодические звенья, их частотные и переходные характеристики
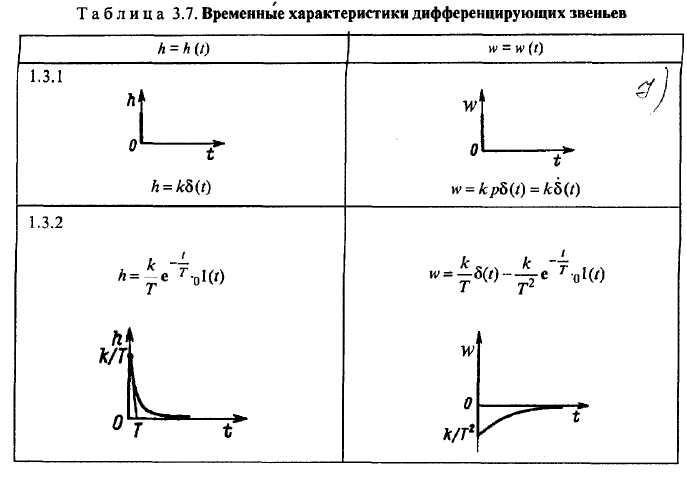
13. Дифференцирующие и форсирующие звенья, их частотные и переходные характеристики

17. Основные виды соединений звеньев сау, их передаточные функции, частотные характеристики
Существует 3 осн вида соединения звеньев:
-последовательное
-параллельное
-обратной связи
1) Так называется соединение, при котором выходная переменная предшествующего звена является входной переменной последующего звена
![]()
При последовательном соединении передаточные функции отдельных звеньев перемножаются, и при преобразовании структурных схем цепочку из
последовательно соединенных звеньев можно заменить одним звеном с передаточной функцией
![]()
2)Так называется соединение, при котором на входы всех звеньев подается одно и то же воздействие, а их выходные переменные складываются
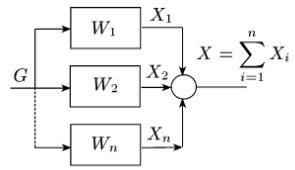
При параллельном соединении звеньев передаточные функции складываются, и при преобразовании их можно заменить одним звеном с передаточной функцией
![]()
Если выход какого-либо звена
поступает на сумматор с отрицательным знаком, то передаточная
функция этого звена складывается с отрицательным знаком, т.е. вычитается
3) Обратное соединение, или звено, охваченное обратной связью. Так называется соединение двух звеньев, при котором выход звена прямой цепи подается на вход звена обратной связи, выход которого складывается с входом первого звена Если сигнал обратной связи вычитается, то обратная связь называется отрицательной, в противном случае — положительной.
![]()
![]()
![]()
Передаточная функция:
![]()