

39. Основные понятия по Ляпунову об устойчивости нелинейных систем. Основные виды устойчивости нелинейных систем.
Устойчивость
по Ляпунову: «Невозмущенное движение
устойчиво, если при достаточно малых
начальных возмущениях вызванное ими
возмущенное движение сколь угодно мало
отличается от невозмущенного; при этом
движение асимптотически устойчиво,
если при
t![]() возмущенное движение стремится к
невозмущенному.»
возмущенное движение стремится к
невозмущенному.»
Невозмущенным движением системы - одно из возможных расчетных движений системы при некоторых определенных начальных условиях и заданном внешнем воздействии. Всякое другое движение называется возмущенным. Можно считать, что любое возмущенное движение получается за счет приложения к системе кратковременного внешнего возмущения при t = 0.
От наличия внешних воздействий на систему, системы управления могут быть разделены на автономные и неавтономные. В автономных системах внешние воздействия отсутствуют. К автономной системе может быть сведена любая из непрерывных систем при не зависящем от времени внешнем воздействии. В неавтономных системах существуют зависящие от времени внешние воздействия.
Так как в автономных нелинейных системах наиболее характерными: являются два процесса равновесие и автоколебания, то для них рассматриваются два различных понятия устойчивости: устойчивость равновесия и устойчивость автоколебаний. Для неавтономных систем существует понятие устойчивости процесса, обусловленного внешним воздействием.
Состояние равновесия и установившийся режим автоколебаний можно рассматривать как важные частные случаи невозмущенных движений автономной системы.
Для общего суждения об устойчивости движения пользуются понятием устойчивости, данным А. М. Ляпуновым: движение устойчиво, если для любой сколь угодно малой заданной области допустимых отклонений k от точки k = 0 можно указать область начальных значений лежащую внутри области и обладающую тем свойством, что ни одно возмущенное движение, начавшееся внутри области никогда не достигнет границы области .
О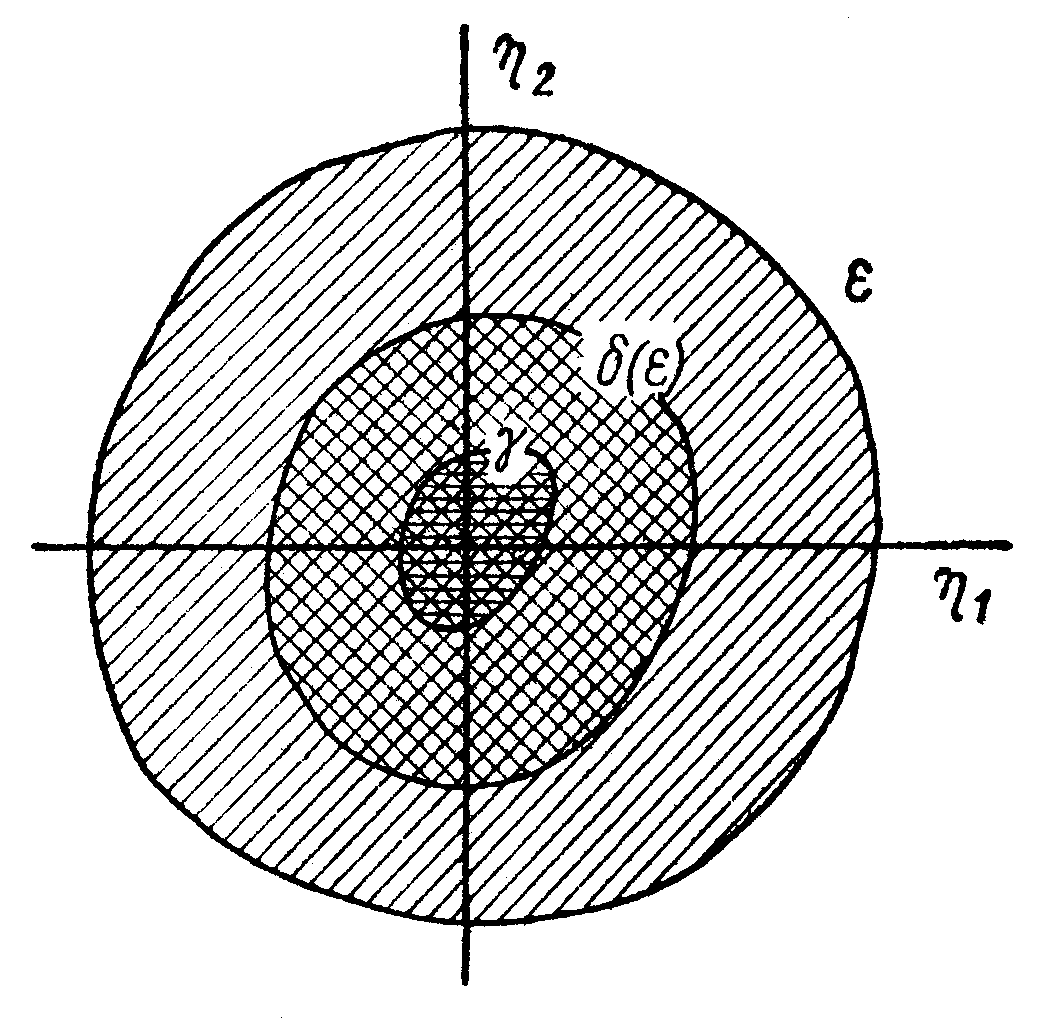 бласти
и
на плоскости 1
и 2
схематически показаны на рис. 18.1
бласти
и
на плоскости 1
и 2
схематически показаны на рис. 18.1
Для
характеристики устойчивости кроме
областей
и
удобно ввести понятие области
установившихся значений разности
возмущенного и невозмущенного движений.
При t![]()
![]() (18.3)
(18.3)
Вид области зависит от области начальных отклонений. Нужно отметить два практически важных частных случая областей . В первом случае = 0, т. е.
![]() (18.4)
(18.4)
Такое движение называют асимптотически устойчивым. Если для выполнения равенства (18.4) требуется, чтобы область начальных отклонений была достаточно мала, то говорят об асимптотической устойчивости в малом. Если эта область может иметь конечные размеры, то говорят об асимптотической устойчивости в большом. Если, наконец, равенство (18.4) выполняется при сколь угодно больших начальных отклонениях, то говорят об асимптотической устойчивости в целом.
Во втором частном случае область представляет собой отрезок на оси 1. В этом случае равенство (18.4) не выполняется при сколь угодно малых отклонениях от равновесия и устойчивость относится к неасимптотической.
Для суждения об устойчивости автоколебаний вводится понятие орбитальной устойчивости.
Периодическое движение (автоколебание) в пространстве состояний изображается некоторой замкнутой кривой Г. Представляя любую траекторию геометрическим местом конца вектора x(t), можно для любого момента времени t определить кратчайшее расстояние ох конца вектора x(t) до кривой Г, которое обозначим [x(t), Г].
Под орбитально асимптотически устойчивым периодическим движением в автономной системе (автоколебанием) будем понимать такое движение, для которого
![]() . (18.5)
. (18.5)
Это условие можно выразить с помощью понятия невозмущенного движения, если учесть возможный сдвиг по времени между xH(t) и х(t).
Обозначив
![]() , (18.6)
, (18.6)
можно условие орбитальной асимптотической устойчивости сформулировать следующим образом: существуют такие положительные вещественные значения = 0, для которых
![]() (18.7)
(18.7)
Невыполнение условия (18.5) или (18.7) приводит к нарушению орбитальной асимптотической устойчивости.