

7.2. Классификация зубчатых механизмов
Зубчатые механизмы классифицируются:
а) по виду расположения осей – различают зубчатые механизмы:
-
цилиндрические – при передаче вращения между параллельными осями (рис. 67);
а) б)
б)![]() в)
в)
 г)
г)
Рис. 67. Цилиндрические зубчатые механизмы
-
конические – при передаче вращения между пересекающимися осями (рис. 68);

Рис. 68. Конические зубчатые механизмы
-
винтовые – при передаче вращения между скрещивающимися осями (рис. 69).

Рис. 69. Винтовой зубчатый механизм
б) по виду зацепления – зубчатый механизм может быть с зацеплением зубьев:
-
внешним (рис. 67, а);
-
внутренним (рис. 67, г);
-
реечным (рис. 67, в).
в) по расположению зубьев колес относительно образующей обода – различают зубчатые передачи:
-
прямозубые (рис. 67, а);
-
косозубые (рис. 67, б).
7.3. Основная теорема зацепления
Общая нормаль к соприкасающимся профилям зубьев в данный момент зацепления делит линию центров колес на части, обратно пропорциональные угловым скоростям.

Следствие
1. Проекции
скоростей на общую касательную
![]() не равны между собой. Поэтому зацепление
зубьев происходит со скольжением
профилей, от которого возникает износ
и потери на трение, зависящие от скорости
скольжения
не равны между собой. Поэтому зацепление
зубьев происходит со скольжением
профилей, от которого возникает износ
и потери на трение, зависящие от скорости
скольжения
![]() .
.
Скольжения
не будет только тогда, когда
![]() ,
т. е. в момент зацепления зубьев на линии
центров.
,
т. е. в момент зацепления зубьев на линии
центров.
Следствие 2. Для постоянства передаточного отношения необходимо, чтобы общая нормаль NN в любой момент зацепления проходила через одну и ту же точку на линии центров, называемую полюсом зацепления Р.
Окружности, проходящие через полюс зацепления, называют начальными (rω1 и rω2).
Расстояние по дуге начальной окружности между двумя соседними зубьями называется шагом по начальной окружности (Pω1 и Pω2). Так как начальные окружности – центроиды, то Pω1 = Pω2 = Pω.
Числа
зубьев
колес
обычно обозначаются через z
(z1
и
z2).
Тогда следующие равенства очевидны:
![]() и
и
![]() .
.
Из основной теоремы зацепления для круглых колес имеем:
 ,
(7.1)
,
(7.1)
т. е. передаточное отношение пары зубчатых колес с неподвижными осями обратно пропорционально числу зубьев, взятому с соответствующим знаком. Для внешнего зацепления – знак «минус», для внутреннего – «плюс».
В настоящее время в машиностроении и приборостроении основной кривой для профилей зубьев является эвольвента круга, предложенная Л. Эйлером в 1754 г.
7.4. Эвольвента и её свойства
Эвольвента представляет собой развертку круга (рис. 71, а).
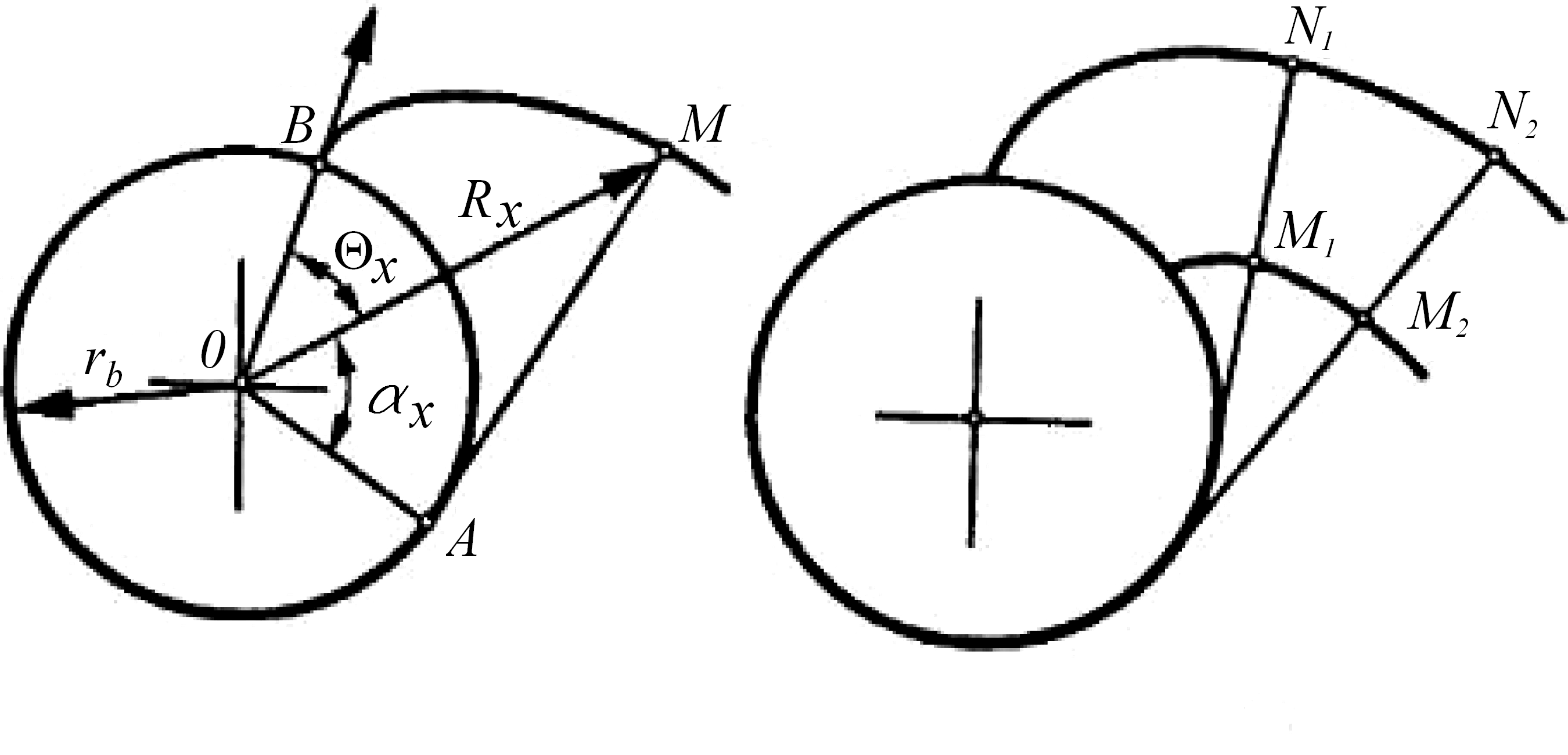
Рис. 71. Образование эвольвенты
Развертываемую окружность (эволюту) принято в теории зубчатых колес называть основной окружностью радиуса rb. Из способа образования эвольвенты следует, что всегда АВ = AM, т. е.:
![]() .
.
Отсюда:
![]() ,
а из
,
а из
![]() :
:
 .
(7.3)
.
(7.3)
Это
уравнение является параметрическим
уравнением
эвольвенты в полярных координатах.
Полярная ось
при этом проходит через начало эвольвенты
(точка В).
Угол
![]() –
центральный угол между полярной осью
и радиус-вектором
в точку М.
Разность (
–
центральный угол между полярной осью
и радиус-вектором
в точку М.
Разность (![]() )
часто
встречается
в теории зубчатых колес и для
упрощения
расчетов представлена в справочных
таблицах под названием «Инволюта
угла
)
часто
встречается
в теории зубчатых колес и для
упрощения
расчетов представлена в справочных
таблицах под названием «Инволюта
угла
![]() »:
»:
![]() .
.
Следующие свойства эвольвенты, используемые в зубчатых колесах, очевидны:
-
нормаль к эвольвенте является касательной к основной окружности;
-
радиус кривизны эвольвенты в любой ее точке равен расстоянию от эвольвенты до точки касания нормали с основной окружностью, т. е. РM = AM;
-
две эвольвенты одной окружности эквидистантны, т. е. равно отстоят друг от друга (M1N1 = M2N2) (рис. 71, б).
Определение эвольвенты и ее аналитическое уравнение используются также для графического построения эвольвенты.