

8.6. Планы линейных и угловых скоростей планетарных механизмов
Планы линейных и угловых скоростей планетарных механизмов дают наглядное представление о распределении скоростей по звеньям. Они позволяют легко определить скорости в относительном и абсолютном движении, необходимые для прочностного и динамического расчетов (учет динамики зацепления, КПД и т. п.).
Построение плана линейных скоростей основано на теореме о распределении скоростей по твердому телу и свойствах начальных окружностей (качении без скольжения).
Рассмотрим построение на примере AJ-механизма (рис. 99).
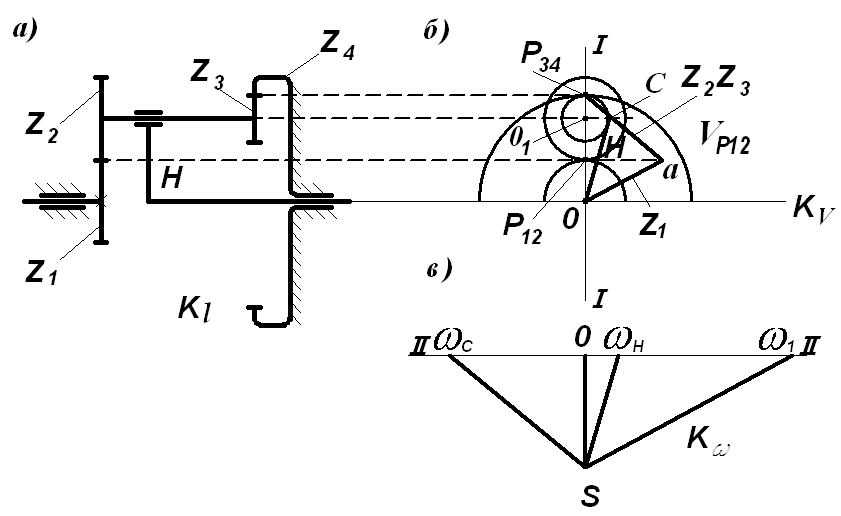
Рис. 99. Построение планов скоростей и ускорений планетарного механизма
Выбирается
прямая I–I,
представляющая собой линию центров
второй проекции схемы механизма. При
известной угловой скорости
![]() звена z1
можно
определить скорость на начальной
окружности r1
как VP12
= r1
звена z1
можно
определить скорость на начальной
окружности r1
как VP12
= r1![]() =
=![]() kv.
Точка О
на оси имеет
нулевую скорость. Знание скоростей двух
точек позволяет построить прямую Оа,
представляющую собой закон распределения
скоростей по z1.
Для сателлита z2-z3
известны
скорость в точке Р12
и скорость в полюсе Р34
(равная нулю, так как z4
неподвижно). Распределение скоростей
по сателлиту выражается прямой Р34а.
kv.
Точка О
на оси имеет
нулевую скорость. Знание скоростей двух
точек позволяет построить прямую Оа,
представляющую собой закон распределения
скоростей по z1.
Для сателлита z2-z3
известны
скорость в точке Р12
и скорость в полюсе Р34
(равная нулю, так как z4
неподвижно). Распределение скоростей
по сателлиту выражается прямой Р34а.
На
оси сателлита V01
=
![]() kv
и, следовательно, прямая ОС
выражает распределение скоростей по
водилу.
kv
и, следовательно, прямая ОС
выражает распределение скоростей по
водилу.
Так
как угловая скорость
![]() ,
т. е. на графике пропорциональна тангенсу
угла наклона прямой распределения
скоростей, то, проведя из произвольной
точки S
прямые, параллельные линиям распределения
линейных скоростей, получим на прямой
II–II
от точки О
отрезки, дающие абсолютные угловые
скорости в масштабе:
,
т. е. на графике пропорциональна тангенсу
угла наклона прямой распределения
скоростей, то, проведя из произвольной
точки S
прямые, параллельные линиям распределения
линейных скоростей, получим на прямой
II–II
от точки О
отрезки, дающие абсолютные угловые
скорости в масштабе:
 .
(8.21)
.
(8.21)