

3.4. Визначення зведених до валу електродвигуна моментів статичного опору і моментів інерції приводу
При зведенні моментів статичного опору і моментів інерції до вала електродвигуна необхідно використовувати кінематичну схему механічної системи установки.
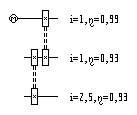
Рис. 9. Кінематична схема механічної системи установки.
Зведений до вала електродвигуна момент статичних опорів системи визначається за формулою:
![]() , (3.6)
, (3.6)
де Мс1, Мс2,.., Мсn – моменти статичних опорів окремих елементів системи, які рухаються обертально, Н·м;
ωд – кутова швидкість електродвигуна, С-1;
Fс – статичне зусилля елемента, що рухається поступально, Н;
υ –лінійна швидкість елемента, що рухається поступально, м/с;
η1, η2,.., ηn – відповідно коефіцієнти корисної дії передач між валами системи та передачі до елемента, що рухається поступально;
і1, і2,.., іn – передаточні відношення передач між валами системи.
![]() . (3.7)
. (3.7)
Зведені до вала електродвигуна момент інерції системи визначається за формулою:
![]() , (3.8)
, (3.8)
де jд – момент інерції ротора електродвигуна і частин, що обертаються на його валу, кг·м2;
j1, j2,.., jn – момент інерції елементів, що обертаються з валами 1, 2,.., n, кг·м2;
m – маса елементів (кг), що рухаються поступально з швидкістю υ, м/с.
Слід зазначити, що в технічних характеристиках робочих машин не наводяться зазначення моменту інерції. Його визначають, як правило, експериментально.
При проектуванні електродвигунів користуються коефіцієнтом інерції Fj системи “двигун-робоча машина”, який визначають за залежністю:
![]() , (3.9)
, (3.9)
де jр – момент інерції ротора, кг·м2;
jм.зв – момент інерції робочої машини, зведений до вала двигуна;
Fj – коефіцієнт інерції, Fj = 15..55.
З формули 3.9 можна визначити орієнтовне значення jм.зв.
![]() . (3.10)
. (3.10)
![]() кг·м2.
кг·м2.
3.5. Перевірка вибраного електродвигуна за тепловим режимом під час роботи
Для робочих машин, які мають постійну навантажувальну діаграму (постійне навантаження) перевірку вибраного електричного двигуна за тепловим режимом під час роботи не виконують.
Перевірку електродвигуна за тепловим режимом під час роботи здійснюють тільки для робочих машин зі змінним навантаженням. Цю перевірку проводять методом середніх втрат, при якому номінальні втрати в електродвигуні порівнюють із середніми втратами за цикл.
![]() , (3.11)
, (3.11)
де ΔРн – номінальні втрати в електричному двигуні, Вт;
ΔРсер –середні втрати за цикл, Вт.
Номінальні втрати в електродвигуні визначаються за формулою:
![]() кВт, (3.12)
кВт, (3.12)
де ηн – номінальний ККД електричного двигуна.
![]() кВт.
кВт.
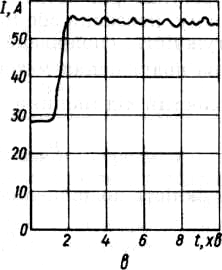
Рис. 10. Навантажувальна діаграма.
Середні втрати в електродвигуні визначають у такій послідовності:
1. Обчислюють еквіваленті значення потужності на ділянках циклу, користуючись навантажувальною діаграмою, за формулою:
![]() Вт, (3.13)
Вт, (3.13)
де Іекв.і – еквівалентне значення струму на і-тих ділянках навантажувальної діаграми, А.
![]() Вт;
Вт;
![]() Вт;
Вт;
![]() Вт;
Вт;
![]() Вт;
Вт;
![]() Вт;
Вт;
![]() Вт;
Вт;
![]() Вт.
Вт.
2. Знаходять втрати потужності на ділянках циклу:
![]() кВт, (3.14)
кВт, (3.14)
де η – ККД електродвигуна.
![]() кВт;
кВт;
![]() кВт;
кВт;
![]() кВт;
кВт;
![]() кВт;
кВт;
![]() кВт;
кВт;
![]() кВт;
кВт;
![]() кВт.
кВт.
3. Визначають середні втрати за цикл:
![]() кВт. (3.15)
кВт. (3.15)
![]()
= 2,836 кВт.
За рівністю 3.11 умова виконується.
Таблиця 5.1. Дані для побудови графіків η = f (Р) і cosφ = f (Р).
|
Р/Рн, % |
25 |
50 |
75 |
100 |
125 |
|
η |
87 |
90,5 |
91 |
91 |
89 |
|
cosφ, % |
0,66 |
0,83 |
0,88 |
0,89 |
0,89 |
|
Р, кВт |
7,5 |
15 |
22,5 |
30 |
37,5 |
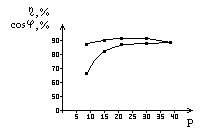
Рис. 11. Графіки залежності η = f (Р) і cosφ = f (Р).