

Лекция 10 Кинематическая энергия манипулятора
Зная скорость произвольной точки каждого звена манипулятора, найдём кинетическую энергию i-го звена.
Обозначим
через
![]() кинетическую энергию i-го
звена (i=1,
2, …, n).
Пусть
кинетическую энергию i-го
звена (i=1,
2, …, n).
Пусть
![]() кинетическую энергию элемента массы
dm
i-го
звена. Тогда:
кинетическую энергию элемента массы
dm
i-го
звена. Тогда:
![]() .
(10-1)
.
(10-1)
Здесь
вместо скалярного произведения
используется оператор
![]() (след матрицы
(след матрицы
![]() ),
что в дальнейшем позволит перейти к
матрице инерции
),
что в дальнейшем позволит перейти к
матрице инерции
![]() i-го
звена.
i-го
звена.
Подставляя
в выражение (10-1) значение
![]() из равенства (9-20), получим выражение для
кинетической энергии элемента массой
dm:
из равенства (9-20), получим выражение для
кинетической энергии элемента массой
dm:
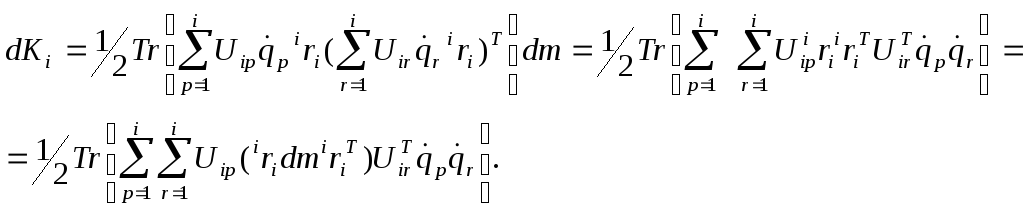 (10-2)
(10-2)
Матрица
![]() характеризует положение точки i-го
звена относительно базовой системы
координат, обусловленное изменением
координаты
характеризует положение точки i-го
звена относительно базовой системы
координат, обусловленное изменением
координаты
![]() .
.
Данная
матрица одинакова для всех точек i-го
звена и не зависит от распределения
массы в этом звене, также как и
![]() .
Таким образом:
.
Таким образом:
 .
(10-3)
.
(10-3)
Интегральный
член в скобках представляет собой
матрицу инерции
![]() i-го
звена:
i-го
звена:
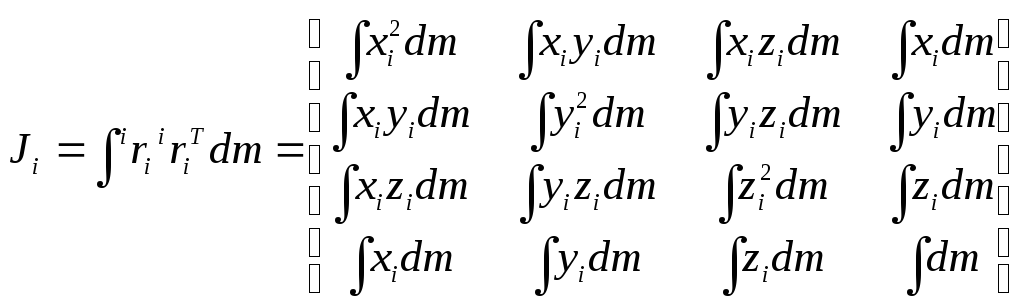 .
(10-4)
.
(10-4)
Преобразуя выражения, получим:
 ,
(10-5)
,
(10-5)
где
![]() однородные координаты центра масс i-го
звена в i-й
системе координат;
однородные координаты центра масс i-го
звена в i-й
системе координат;
 -
тензор инерции, где i,
j,
k
принимают значения xi,
yi,
zi
(оси i-ой
системы координат), а
-
тензор инерции, где i,
j,
k
принимают значения xi,
yi,
zi
(оси i-ой
системы координат), а
![]() - символ Кроникера.
- символ Кроникера.
Формулу (6-26) можно также записать в виде:
 .
(10-6)
.
(10-6)
Здесь
 и j,
k=1,
2, 3, а
и j,
k=1,
2, 3, а
![]() -
радиус вектор центра масс i-го
звена в системе координат i-го
звена. Таким образом, полная кинетическая
энергия манипулятора равна:
-
радиус вектор центра масс i-го
звена в системе координат i-го
звена. Таким образом, полная кинетическая
энергия манипулятора равна:
 .
(10-7)
.
(10-7)
Отметим, что величина Ji (i=1, 2,…, n) зависит только от распределения массы i-го звена в i-й системе координат и не зависит ни от положения, ни от скорости звеньев. Это позволяет однажды вычислив матрицу Ji, использовать полученное значение в дальнейшем для вычисления кинетической энергии манипулятора.
Потенциальная энергия манипулятора
Обозначим
полную потенциальную энергию манипулятора
через Р,
а потенциальную энергию i-го
звена – через
![]() .
Тогда:
.
Тогда:
![]() .
(10-8)
.
(10-8)
Суммируя потенциальные энергии всех звеньев, получаем:
![]() .
(10-9)
.
(10-9)
Здесь
![]() - вектор-строка, описывающая гравитационное
ускорение в базовой системе координат.
В земной системе координат
- вектор-строка, описывающая гравитационное
ускорение в базовой системе координат.
В земной системе координат
![]() ,
а g
– ускорение свободного падения на
поверхности Земли (g=9,8062
м/с2).
,
а g
– ускорение свободного падения на
поверхности Земли (g=9,8062
м/с2).
Уравнение движения манипулятора
Используя равенства (10-7) и (10-9), запишем выражение для функции Лагранжа:
![]() .
(10-10)
.
(10-10)
Подставив
это выражение в уравнение Лагранжа,
получим выражение для обобщённой силы
![]() ,
которую должен развить силовой привод
i-го
сочленения, чтобы реализовать задание
движение i-го
звена манипулятора:
,
которую должен развить силовой привод
i-го
сочленения, чтобы реализовать задание
движение i-го
звена манипулятора:
 (10-11)
(10-11)
![]() .
.
Выражение (10-11) можно представить в более простой форме:
![]() ,
,
![]() ,
(10-12)
,
(10-12)
или в матричном виде:
![]() ,
(10-13)
,
(10-13)
где
![]() - вектор (размерностью n×1)
обобщённых сил, создаваемых силовыми
приводами в сочленениях манипулятора:
- вектор (размерностью n×1)
обобщённых сил, создаваемых силовыми
приводами в сочленениях манипулятора:
![]() ;
(10-14)
;
(10-14)
![]() -
вектор (размерностью n×1)
присоединенных переменных манипулятора:
-
вектор (размерностью n×1)
присоединенных переменных манипулятора:
![]() ;
(10-15)
;
(10-15)
![]() - вектор (размерностью
n×1)
обобщённых скоростей:
- вектор (размерностью
n×1)
обобщённых скоростей:
![]() ;
(10-16)
;
(10-16)
![]() - вектор (размерностью
n×1)
обобщённых ускорений:
- вектор (размерностью
n×1)
обобщённых ускорений:
![]() ;
(10-17)
;
(10-17)
D(q) – симметричная матрица размерностью n×n, элементы которой даются выражением:
![]() ,
,
![]() ;
(10-18)
;
(10-18)
![]() -
вектор (размерностью n×1)
кориолисовых и центробежных сил:
-
вектор (размерностью n×1)
кориолисовых и центробежных сил:
 ,
,
![]() ,
,
![]() ,
(10-19)
,
(10-19)
![]() ,
,
![]() ;
(10-20)
;
(10-20)
![]() - вектор (размерностью
n×1)
гравитационных сил:
- вектор (размерностью
n×1)
гравитационных сил:
![]() ,
,
![]()
![]() .
(10-21)
.
(10-21)